
 商标分类
商标分类  商标转让
商标转让 
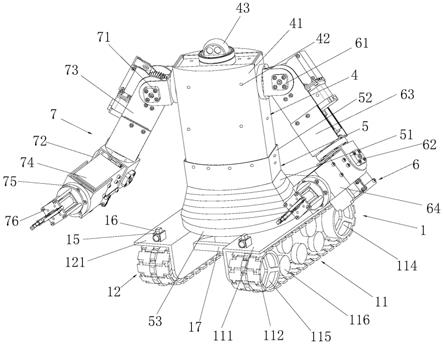
一种适应复杂路况的机器人行走装置的制作方法
2021-02-08本实用新型涉及一种适应复杂路况的机器人行走装置,属于自主移动机器人技术领域。背景技术:传统机器人的行走装置多为履带式或者轮式结构,轮式结构的机器人适用于在平坦道路上行走,其爬坡
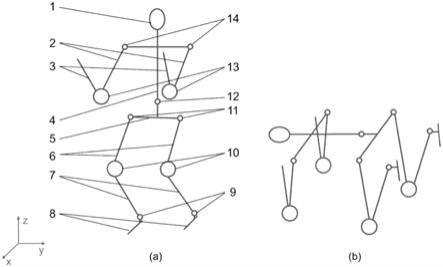
一种具有双足/四轮/四足运动模式的可重构足式机器人的制作方法
2021-02-08本实用新型涉及足式机器人领域,尤其涉及一种具有双足/四轮/四足运动模式的可重构足式机器人。背景技术:双足、四足及轮式机器人各自具有鲜明的优缺点。例如,双足机器人在地形适应能力方

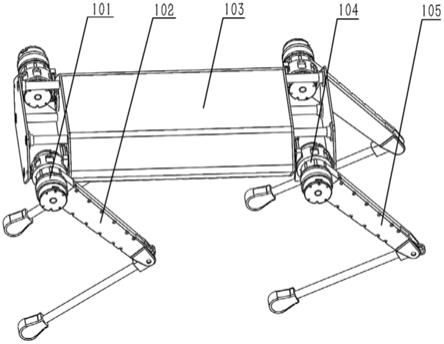
一种电驱动仿生四足机器人的制作方法
2021-02-07[0001]本公开涉及仿生四足机器人,尤其涉及一种电驱动仿生四足机器人。背景技术:[0002]四足仿生机器人的研究长期以来一直是国内外机器人领域研究的热点之一。该类机器人能够在






tips