
 商标分类
商标分类  商标转让
商标转让 
一种电驱动仿生四足机器人的制作方法
 2021-02-07 02:02:33|
2021-02-07 02:02:33| 280|
280| 起点商标网
起点商标网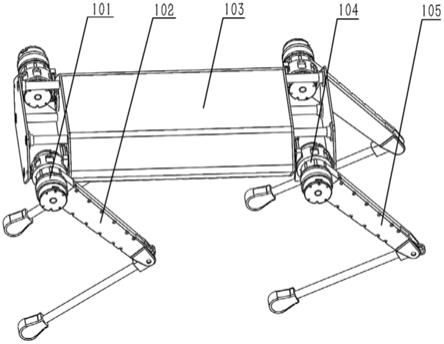
[0001]
本公开涉及仿生四足机器人,尤其涉及一种电驱动仿生四足机器人。
背景技术:
[0002]
四足仿生机器人的研究长期以来一直是国内外机器人领域研究的热点之一。该类机器人能够在复杂的非结构环境中稳定地行走,可以代替人完成许多危险作业,在军事、矿山开采、核能工业、星球表面探测、消防及营救、建筑业、农林采伐、示教娱乐等行业有着许多潜在的应用前景。四足仿生机器人的研究始于20世纪60年代,产生了许多具有代表性的机器人样机。近几年来,高速、高承载、低能耗、自带动力源的机器人设计成为了四足机器人的研究重点。目前国内外著名的研究成果有美国波士顿动力公司承担研制的bigdog、alphadog、littledog和猎豹cheetah,意大利iit大学研制的hyq机器人,日本千叶工大米田完教授研制的hyperion 4机器人,山东大学研制的液压驱动四足仿生机器人等。现有的四足机器人的腿部机械结构几乎都为串联机构组成。这种串联结构简单,控制建模容易,但由于驱动器多安装在腿部,使得下级驱动器成为上级驱动器的负载,驱动能力要求高。国内外对并联腿式机器人的研究多放在单足或双足步行机器人方向。例如日本早稻田大学的wl系列步行椅的设计,广濑研究室的para-walker的设计。国内则有燕山大学王洪波等提出的四足/两足可重组步行器的构想。并联式腿结构具有较大的刚度,可提高机器人的载重自重比,但在机构本身的工作空间方面受限,较难完成高速度的行走越障作业。
[0003]
公开号为cn 101927793 a公开了一种“匍匐与直立运动互变的变结构四足机器人结构”,该四足机器人有机体和固定在上面的四条肢体,每条肢体采用三个舵机控制,舵机间为串联结构,这种结构连接杆件多,结构复杂,不适用于要求小型、轻便的仿生机器人。同时该结构中机体是一个整体,限制了运动的灵活性。
[0004]
公开号为cn 101811525 a公开了一种“具有质心调整装置的液压驱动四足机器人移动机构”,该机器人机构的在躯干下面布置四条腿,均采用液压驱动,每条腿有具有冗余自由度,增加了机构控制的复杂性。另外液压驱动提高了整套机构的体积和重量,不方便携带运输和拆装。
[0005]
公开号为cn 101791994 a公开了“一种凸轮驱动控制式四足机器人的行走机构”,机构分为前后腿组件和连接前后腿组件的万向连接组件。其中万向节连接组件仅仅是提供一个被动的运动形式,不能对人为的对其控制,不利于机构的运动和平衡控制。
技术实现要素:
[0006]
为了解决上述技术问题中的至少一个,本公开提供了一种电驱动仿生四足机器人。
[0007]
本公开的技术方案是这样实现的:
[0008]
一种电驱动仿生四足机器人,包括:躯体组件、两个前腿组件、两个后腿组件、两个前腿关节组件和两个后腿关节组件;
[0009]
所述前腿组件和所述后腿组件均包括大腿件和小腿件;所述小腿件与所述大腿件可转动地相连;
[0010]
所述前腿关节组件和所述后腿关节组件均包括:髋关节摇摆电机、摇摆连杆、髋关节旋转电机和膝关节电机;
[0011]
所述髋关节摇摆电机安装于所述躯体组件上,所述摇摆连杆的一端与所述髋关节摇摆电机的输出轴相连,另一端与所述髋关节旋转电机的壳体相连,所述髋关节摇摆电机通过驱动所述摇摆连杆摆动,带动所述髋关节旋转电机左右摆动;
[0012]
所述髋关节旋转电机的输出轴与所述大腿件相连并驱动所述大腿件前后摆动;所述膝关节电机通过膝关节连接杆驱动所述小腿件前后摆动。
[0013]
进一步的,所述小腿件的底端连接有足部。
[0014]
进一步的,所述前腿关节组件和所述后腿关节组件均还包括大腿连接件,所述髋关节旋转电机的输出轴与所述大腿连接件传动连接,所述大腿连接件与所述大腿件固定相连。
[0015]
进一步的,所述膝关节电机的壳体与所述大腿连接件固定相连;所述髋关节旋转电机的输出轴与所述膝关节电机的输出轴相向设置,所述大腿连接件内设有一容纳所述膝关节电机输出轴的空腔,所述膝关节连接杆的一端伸入所述空腔并与所述膝关节电机的输出轴传动连接,所述膝关节连接杆的另一端与所述小腿件相连。
[0016]
进一步的,所述前腿关节组件和所述后腿关节组件均还包括过渡法兰,所述髋关节摇摆电机与所述过渡法兰固定相连,所述摇摆连杆通过转轴与所述过渡法兰相连,所述转轴与所述髋关节摇摆电机的输出轴传动连接。
[0017]
进一步的,所述前腿组件和所述后腿组件均还包括:旋转块和旋转轴,所述膝关节连接杆的另一端与所述旋转块相连,所述旋转块与所述小腿件相连,所述旋转块连接于所述旋转轴上;所述大腿件与所述旋转轴通过轴承相连。
[0018]
进一步的,所述髋关节摇摆电机输出轴的轴心线与髋关节旋转电机输出轴的轴心线呈一夹角;
[0019]
和/或所述髋关节旋转电机输出轴的轴心线与膝关节电机输出轴的轴心线重合或平行。
[0020]
进一步的,所述夹角为90
°
。
[0021]
进一步的,所述前腿关节组件和所述后腿关节组件均还包括电机固定座,所述电机固定座与所述髋关节旋转电机固定连接,所述摇摆连杆与所述电机固定座相连。
[0022]
进一步的,所述大腿件设有用于穿过所述膝关节连接杆的通道或凹槽;所述膝关节连接杆可沿所述大腿件长度方向移动。
[0023]
进一步的,所述躯体组件包括前挡板、后挡板和控制箱;所述前挡板通过前支撑支柱连接于所述控制箱的前端,所述后挡板通过后支撑支柱连接于控制箱的后端。
[0024]
进一步的,所述前挡板上固定连接有前挡板固定座,所述前挡板通过前挡板固定座与所述前支撑支柱连接;所述后挡板上固定连接有后挡板固定座,所述后挡板通过后挡板固定座与所述后支撑支柱连接。
[0025]
进一步的,所述髋关节摇摆电机通过第一变速箱与摇摆连杆传动连接;和/或所述髋关节旋转电机通过第二变速箱与所述大腿件传动连接;和/或所述膝关节电机通过第三
变速箱与膝关节连接杆传动连接。
[0026]
进一步的,还包括上位机;和分别用于监测摇摆连杆摆动角度、大腿件摆动角度、以及小腿件摆动角度的三个编码器;所述髋关节摇摆电机、所述髋关节旋转电机、所述膝关节电机均与所述上位机通讯连接。
附图说明
[0027]
附图示出了本公开的示例性实施方式,并与其说明一起用于解释本公开的原理,其中包括了这些附图以提供对本公开的进一步理解,并且附图包括在本说明书中并构成本说明书的一部分。
[0028]
图1为本公开的电驱动仿生四足机器人的结构示意图;
[0029]
图2为本公开的前腿关节组件和后腿关节组件的结构示意图;
[0030]
图3为本公开的前腿组件和后腿组件的结构示意图;
[0031]
图4为本公开的躯体组件结构示意图;
[0032]
前腿关节组件101、前腿组件102、躯体组件103、后腿关节组件104、后腿组件105、髋关节摇摆电机201、过渡法兰202、摇摆连杆203、电机固定座204、髋关节旋转电机205、大腿连接件206、膝关节电机207、膝关节连接杆301、大腿件302、旋转块303、旋转轴304、小腿件305、足部306、前挡板401、前挡板固定座402、前支撑支柱403、控制箱404、后支撑支柱405、后挡板固定座406、后挡板407。
具体实施方式
[0033]
下面结合附图和实施方式对本公开作进一步的详细说明。可以理解的是,此处所描述的具体实施方式仅用于解释相关内容,而非对本公开的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与本公开相关的部分。
[0034]
需要说明的是,在不冲突的情况下,本公开中的实施方式及实施方式中的特征可以相互组合。下面将参考附图并结合实施方式来详细说明本公开。
[0035]
参照图1和图3,一种电驱动仿生四足机器人,包括:躯体组件103、两个前腿组件102、两个后腿组件105、两个前腿关节组件101和两个后腿关节组件104;所述前腿组件102和所述后腿组件105均包括大腿件302和小腿件305;所述小腿件305与所述大腿件302可转动地相连,所述小腿件305的底端连接有足部306;所述两个前腿组件102对称设置在前腿组件103的前端两侧,所述两个后腿组件105对称设置在前腿组件103的后端两侧。所述前腿组件102和后腿组件105为机器人的腿部组件;髋关节摆动电机201、髋关节旋转电机206和膝关节电机207均为关节驱动电机。
[0036]
参照图1、图2和图3,所述前腿关节组件101和所述后腿关节组件104均包括:髋关节摇摆电机201、摇摆连杆203、髋关节旋转电机205和膝关节电机207;所述髋关节摇摆电机201安装于所述前腿组件103上,所述摇摆连杆203的一端与所述髋关节摇摆电机201的输出轴相连,另一端与所述髋关节旋转电机205的壳体相连,所述髋关节摇摆电机201通过驱动所述摇摆连杆203摆动,带动所述髋关节旋转电机205左右摆动;所述髋关节旋转电机205的输出轴与所述大腿件302相连并驱动所述大腿件302前后摆动;所述膝关节电机207通过膝关节连接杆301驱动所述小腿件305前后摆动。
[0037]
参照图1、图2和图3,在本实施例中,所述髋关节摇摆电机201通过摇摆连杆203与所述髋关节旋转电机205相连,所述髋关节旋转电机205与所述大腿连接件206相连,髋关节摇摆电机201通过摇摆连杆203带动髋关节旋转电机205摆动,进而带动整个前腿组件102摆动,实现机器人行走过程的横向位移和转向功能。所述髋关节摇摆电机201与髋关节旋转电机205相连驱动,实现摆动,能够极大的减少了控制机器人横向移动和转向的零件,而且使得实现机器人转向和前后移动的驱动部件集中设置在髋关节位置,减少关节和大腿组件的负载,增强了前腿组件102和后腿组件105活动的灵活性,实现机器人的轻便化,而且前腿组件102和后腿组件105运动惯性减小,更有利于运动和平衡的控制。本实施例中,利用髋关节旋转电机205带动所述大腿件302前后摆动,所述膝关节电机207带动小腿件305前后摆动,实现机器人前后行走和支撑。
[0038]
参照图1和图2,作为本实施例的优选方案,为了方便摇摆连杆203与髋关节旋转电机205的连接,所述前腿关节组件101和所述后腿关节组件104均还包括电机固定座204,所述电机固定座204与所述髋关节旋转电机205固定连接,所述摇摆连杆203与所述电机固定座204相连。
[0039]
参照图1、图2和图3,所述前腿关节组件101和所述后腿关节组件104均还包括大腿连接件206,所述髋关节旋转电机205的输出轴与所述大腿连接件206传动连接,所述大腿连接件206与所述大腿件302固定相连。所述膝关节电机207的壳体与所述大腿连接件206固定相连;所述髋关节旋转电机205的输出轴与所述膝关节电机207的输出轴相向设置,所述大腿连接件206内设有一容纳所述膝关节电机207输出轴的空腔,所述膝关节连接杆301的一端伸入所述空腔并与所述膝关节电机207的输出轴传动连接,所述膝关节连接杆301的另一端与所述小腿件305相连。
[0040]
参照图1和图2,在本实施例中,所述髋关节摇摆电机201通过摇摆连杆203与所述髋关节旋转电机205相连,所述髋关节旋转电机205与所述大腿连接件206相连,所述膝关节电机207的壳体与所述大腿连接件206固定相连,使得在结构上,关节组件的三个电机紧邻并集中布置在同一位置上,并与前腿组件103连接,膝关节电机207不直接安装在膝关节部位上,通过这种设置,进一步的,减少了前腿组件102和后腿组件105上负载的零件数量,提升了机器人整体的负载能力,将驱动膝关节部位活动的电机安装位置提升到躯体组件103位置,减少了膝关节部位的负重,进一步增强了前腿组件102和后腿组件105活动的灵活性,也进一步减少了前腿组件102和后腿组件105以及关节等部位的体积和种类,进一步的降低整套机构的体积和重量,更加有利于运动和平衡的控制。
[0041]
参照图2和图3,作为本实施例的优选方案,所述髋关节摇摆电机201输出轴的轴心线与髋关节旋转电机205输出轴的轴心线呈一夹角,使得髋关节旋转电机205的摆动方向与大腿件302的摆动方向不同;所述髋关节旋转电机205输出轴的轴心线与膝关节电机207输出轴的轴心线重合或平行,使得大腿件302与小腿件305的摆动方向相同。所述夹角为90
°
或者90
°
左右。
[0042]
参照图1和图2,为了适应不同电机型号,本实施例中,所述前腿关节组件101和所述后腿关节组件104均还包括过渡法兰202,所述髋关节摇摆电机201与所述过渡法兰202固定相连,所述摇摆连杆203通过转轴与所述过渡法兰202相连,所述转轴与所述髋关节摇摆电机201的输出轴传动连接。
[0043]
参照图1、图2和图3,作为本实施例的优选方案,所述前腿组件102和所述后腿组件105均还包括:旋转块303和旋转轴304,所述膝关节连接杆301的另一端与所述旋转块303相连,所述旋转块303与所述小腿件305相连,所述旋转块303连接于所述旋转轴304上;所述大腿件302与所述旋转轴304通过轴承相连。在本实施例中,当膝关节电机207带动膝关节连接杆301移动时候,膝关节连接杆301通过旋转块303带动小腿件305以旋转轴304为轴心转动,实现小腿件305的摆动,电机旋转运动转化为膝关节连接杆301的移动,实现移动距离的自动限位,进而可实现小腿件305摆动距离的物理限位。
[0044]
参照图3,作为本实施例的优选方案,所述大腿件302设有用于穿过所述膝关节连接杆301的通道或凹槽;所述膝关节连接杆301可沿所述大腿件302长度方向移动。
[0045]
参照图1、图2和图4,所述前腿组件103包括前挡板401、后挡板407和控制箱404;所述前挡板401通过前支撑支柱403连接于所述控制箱404的前端,所述后挡板407通过后支撑支柱405连接于控制箱404的后端。所述髋关节摇摆电机201固定在控制箱404的箱壁上。所述髋关节旋转电机205位于所述前挡板401或后挡板407与控制箱404之间的间隙,前挡板401和后挡板407能够对控制箱404、髋关节摇摆电机201、髋关节旋转电机205起到保护作用。
[0046]
参照图4,为了便于前挡板401与后挡板407的安装,本实施例中,所述前挡板401上固定连接有前挡板固定座402,所述前挡板401通过前挡板固定座402与所述前支撑支柱403连接;所述后挡板407上固定连接有后挡板固定座406,所述后挡板407通过后挡板固定座406与所述后支撑支柱405连接。
[0047]
参照图1、图2和图3,作为本实施例的优选方案,为了使得前腿组件102和后腿组件105的运动更加精准,进一步减小回转误差,所述髋关节摇摆电机201通过第一变速箱与摇摆连杆203传动连接;和/或所述髋关节旋转电机205通过第二变速箱与所述大腿件302传动连接;和/或所述膝关节电机207通过第三变速箱与膝关节连接杆301传动连接,变速箱优选用行星齿轮变速箱。本公开的髋关节摇摆电机201、髋关节旋转电机205、膝关节电机207优选用直流无刷电机,配合行星齿轮变速箱,结合上述结构设计,使得关节髋关节结构紧凑,电机驱动与髋关节和膝关节匹配度高,回转误差较小。
[0048]
本实施例中,所述的仿生四足机器人还包括上位机;和分别用于监测摇摆连杆203摆动角度、大腿件302摆动角度、以及小腿件305摆动角度的三个编码器;所述髋关节摇摆电机201、所述髋关节旋转电机205、所述膝关节电机207均与所述上位机通讯连接,可采用总线和串口与上位机通讯。通过上位机发送预设的运动姿态轨迹给电机驱动器,实时地驱动特定的关节,同时编码器可采集特定关节转动的角度并发送给上位机用于与期望姿态轨迹比较分析,通过上位机设定运动关节限位,实现摇摆连杆203、大腿件302、小腿件305摆动幅度的软限位。通过以上技术,实现髋关节和膝关节的运动软限位和机械限位相结合,满足四足机器人关节自由度运动范围的同时,可有效地进行约束,极大的提高机器人的可靠性和安全性。
[0049]
本公开“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本申请的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0050]
本公开中“前”、“后”为相对于机器人前后行进方向,“左”、“右”为相对于机器人宽度方向。
[0051]
本公开中“关节”包括“髋关节”和“膝关节”,“髋关节”是主要由髋关节摇摆电机和髋关节旋转电机组成,位于大腿件与躯体组件的连接部位;“膝关节”是指大腿件与小腿件的连接部位。
[0052]
本领域的技术人员应当理解,上述实施方式仅仅是为了清楚地说明本公开,而并非是对本公开的范围进行限定。对于所属领域的技术人员而言,在上述公开的基础上还可以做出其它变化或变型,并且这些变化或变型仍处于本公开的范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips