
 商标分类
商标分类  商标转让
商标转让 
一种电液混合驱动的运动模式可重构足式机器人的制作方法
 2021-02-07 04:02:19|
2021-02-07 04:02:19| 304|
304| 起点商标网
起点商标网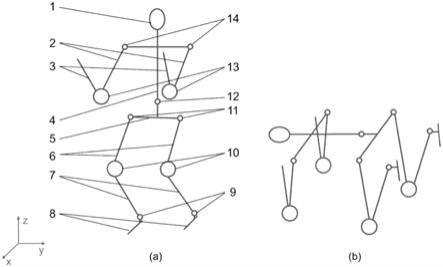
[0001]
本实用新型涉及足式机器人领域,尤其涉及一种电液混合驱动的运动模式可重构足式机器人。
背景技术:
[0002]
足式机器人相比于传统的轮履式机器人在运动灵活性、环境适应性等方面具有显著的优势,可在楼梯、沟壑、崎岖地面、障碍等环境中通行。因而在野外勘探、灾后救援、物资运输等场景中,足式机器人潜藏着巨大的应用前景。但在充分发挥其实用价值之前,仍有许多需要攻克的技术瓶颈。其中,足式机器人的动力驱动系统始终是最关键的技术之一。
[0003]
目前足式机器人的驱动方式主要有电机驱动和液压驱动两种。电机驱动技术成熟、结构简单,便于实现小型化、轻量化、高精度的驱动控制,缺点是功率密度低、负载能力抗扰性差;液压驱动功率密度高、负载能力大、抗扰强,便于实现高机动性的驱动,缺点是系统复杂、能效低。针对足式机器人在不同场景的不同需求,以及机器人上不同关节对性能的不同要求,合理利用两种驱动方式,取长补短,对优化机器人的驱动系统、提升机器人的机动性能具有重要意义。
技术实现要素:
[0004]
针对现有的足式机器人仅采用单一驱动方式以及运动模式不可变的问题,本实用新型提出了一种电液混合驱动的运动模式可重构足式机器人。
[0005]
本实用新型的目的通过如下的技术方案来实现:一种电液混合驱动的运动模式可重构足式机器人,包括头、大臂、小臂、躯干、胯、大腿、小腿、足、踝关节、膝关节、髋关节、腰关节、肘关节、肩关节、主动轮、从动轮、电池、液压泵、液压缸和电机;所述头与躯干刚性连接;所述大臂通过肩关节与躯干铰接;所述小臂通过肘关节与大臂铰接;所述躯干与胯铰接;所述大腿通过髋关节与胯铰接;所述小腿通过膝关节与大腿铰接;所述足通过踝关节与小腿铰接。所述电池和液压泵设置于躯干背面,与躯干刚性连接,电池分别与液压泵、电机固定连接,液压泵与液压缸通过油路连接。所述电机设置于肩关节和肘关节,分别与肩关节、肘关节的旋转轴连接,所述液压缸设置于腰关节、髋关节、膝关节和踝关节,分别与腰关节、髋关节、膝关节、踝关节的两端铰接;所述从动轮设置于膝关节,与膝关节的旋转轴连接,主动轮设置于肘关节,与肘关节的旋转轴连接。
[0006]
进一步地,所述肘关节上的电机包括电机转子和电机定子,电机定子与大臂刚性连接,电机转子与主动轮刚性连接。
[0007]
进一步地,电机转子在步行模式下与小臂刚性连接;在轮驱模式下与小臂铰接。
[0008]
本实用新型的有益效果如下:本实用新型的一种电液混合驱动的运动模式可重构足式机器人,其腰关节、髋关节、膝关节、踝关节采用液压驱动,使得机器人具有较高的机动性、灵活性以及较强的负载能力和运动能力,而肩关节、肘关节采用电机驱动,使得机器人结构大大简化,减小了重量,便于实现上肢的灵巧动作。该足式机器人具有步行模式和轮驱
模式两种运动方式,根据不同场景选择较强的通过性或较快的移动速度,充分根据环境需求发挥两种模式的优势。
附图说明
[0009]
图1是电液混合驱动的运动模式可重构足式机器人结构简图:图1(a)为步行模式,(b) 为轮驱模式;
[0010]
图2是本实用新型一种电液混合驱动的运动模式可重构足式机器人驱动系统框图;
[0011]
图3是本实用新型一种运动模式可重构的肘关节结构示意图。
具体实施方式
[0012]
下面根据附图和优选实施例详细描述本实用新型,本实用新型的目的和效果将变得更加明白。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
[0013]
如图1,为本实用新型的电液混合驱动的运动模式可重构足式机器人结构简图,包括头1、大臂2、小臂3、躯干4、胯5、大腿6、小腿7、足8、踝关节9、膝关节10、髋关节11、腰关节12、肘关节13、肩关节14、主动轮、从动轮、电池、液压泵、液压缸和电机;所述头1 与躯干4刚性连接;所述大臂2通过肩关节14与躯干4铰接,具有x、y、z三个方向的旋转自由度;所述小臂3通过肘关节13与大臂2铰接,具有y方向的旋转自由度;所述躯干4与胯5铰接,具有z方向的旋转自由度;所述大腿6通过髋关节11与胯5铰接,具有x、y、z 三个方向的旋转自由度;所述小腿7通过膝关节10与大腿6铰接,具有y方向的旋转自由度;所述足8通过踝关节9与小腿7铰接,具有x、y两个方向的旋转自由度。
[0014]
机器人的驱动系统框图如图2所示,电池是驱动系统的能量来源,为液压泵和电机提供电能。所述电池设置于躯干4背面,电池与分别与液压泵、电机通过电缆固定连接,所述电机的类型为永磁同步伺服电机,设置于肩关节14、肘关节13的旋转轴上,分别与肩关节14、肘关节13的旋转轴连接,由于肩关节14、肘关节13负载较小且结构空间紧凑,通过电机驱动,既能实现手部灵巧运动的需求,同时也能减小关节重量。所述肘关节13电机包括电机转子16和电机定子18,电机定子18与大臂2刚性连接,电机转子16与主动轮刚性连接。液压泵为整个液压系统提供液压能,所述液压泵与液压缸通过油路连接,所述液压泵的类型为伺服阀控液压缸,设置于腰关节12、髋关节11、膝关节10、踝关节9的两端,分别与腰关节12、髋关节11、膝关节10、踝关节9的两端铰接,与液压泵连接;由于腰关节12、髋关节11、膝关节10、踝关节9负载较大,由液压驱动,可以满足上述关节对大力矩的需求,使得机器人具有较强的运动能力和负载能力。所述从动轮设置于膝关节10上,安装在膝关节 10的旋转轴上,可以自由转动;主动轮设置于肘关节13上,与肘关节13上的电机的转子固定连接,当机器人变为轮驱模式时,电机从驱动小臂3变为驱动主动轮,从而带动整个机器人运动。其中,驱动腰关节12的为液压摆动缸,驱动髋关节11、膝关节10、踝关节9的为液压直线缸。
[0015]
肘关节13结构如图3所示,在路面崎岖、有障碍等环境中,以及需要机器人上肢完成指定任务时,机器人以步行模式运动,如图1(a),电机转子16与小臂3刚性连接,电机转子 16通过销17带动小臂3转动,实现小臂3的运动控制,步行模式运动具备较高的灵活性和较
强的通过能力。在平坦地面、铺装公路等简单环境中,机器人以轮驱模式运动,如图1(b),小臂3上的销17退出电机转子上的销孔,电机转子16不再带动小臂3运动,而只驱动主动轮转动,肘关节13作为主动轮,膝关节10作为从动轮,机器人通过肩关节14沿z方向的转动带动主动轮偏转实现转弯动作,通过主动轮正反转实现前进、后退动作,以轮驱模式运动,具备快速移动的能力,且能大幅降低机器人能效值。
[0016]
本领域普通技术人员可以理解,以上所述仅为实用新型的优选实例而已,并不用于限制实用新型,凡在实用新型的精神和原则之内,所做的修改、等同替换等均应包含在实用新型的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips