
 商标分类
商标分类  商标转让
商标转让 
一种工业加工机器人的制作方法
 2021-01-30 11:01:18|
2021-01-30 11:01:18| 225|
225| 起点商标网
起点商标网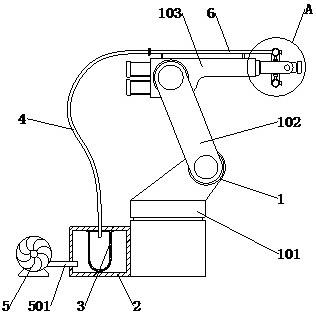
[0001]
本实用新型涉及机器人技术领域,特别是涉及一种工业加工机器人。
背景技术:
[0002]
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器,它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
[0003]
打磨机器人是工业机器人中的一种,打磨机器人在打磨加工过程中,会产生大量的粉尘,而现有技术的打磨机器人不具有吸尘功能,所以会导致粉尘到处飞扬,影响加工车间的环境,为此我们提出了一种工业加工机器人,以解决上述提出的技术问题。
技术实现要素:
[0004]
本实用新型提供了一种工业加工机器人以解决上述背景技术提出的现有技术的打磨机器人不具有吸尘功能的问题。
[0005]
为了实现上述目的,本实用新型采用如下技术方案:
[0006]
一种工业加工机器人,包括打磨机器人,所述打磨机器人包括底座、竖摇臂、横摇臂、旋转臂和打磨头,所述竖摇臂铰接在底座的上端,所述横摇臂铰接在竖摇臂的上端,所述旋转臂转动连接在横摇臂的右端,所述打磨头铰接在旋转臂的右端,所述底座的左端固定连接有负压箱,所述负压箱的内部固定连接有滤尘袋,所述负压箱的顶部插接有伸缩软管,所述负压箱的左方固定设置有高压风机,所述高压风机进风口处固定连接有抽风管,所述抽风管的右端贯穿进负压箱的内部,所述横摇臂的上表面焊接有吸尘钢管,所述吸尘钢管的右端面焊接有吸尘环管,所述吸尘环管套在旋转臂的外周,所述吸尘环管的右侧面均匀开设有若干个吸尘口,所述旋转臂的外圆周面上套有定位圆环,所述定位圆环位于吸尘环管的内侧,所述定位圆环的外圆周面与吸尘环管的内侧面之间均匀焊接有若干个连接杆。
[0007]
进一步的,所述吸尘钢管的左端与伸缩软管的顶部法兰连接,并且吸尘钢管与伸缩软管的相通。
[0008]
进一步的,所述伸缩软管的底部贯穿进滤尘袋的内部,并且伸缩软管与滤尘袋的内部相通。
[0009]
进一步的,所述抽风管与负压箱的内部相通。
[0010]
进一步的,所述定位圆环转动连接在旋转臂的外圆周面上,并且定位圆环与旋转臂之间镶嵌有滚动轴承。
[0011]
进一步的,所述吸尘环管与吸尘钢管相通,所述吸尘环管的吸尘口朝向打磨头。
[0012]
与现有技术相比,本实用新型实现的有益效果:
[0013]
通过打磨机器人与吸尘环管的配合设置,在打磨机器人打磨过程中,吸尘环管的
内部产生负压,之后吸尘环管再利用朝向打磨头的吸尘口,可将打磨产生的粉尘吸取,接着再通过吸尘钢管和伸缩软管将粉尘排入滤尘袋进行收集,于是通过这种结构,可以使得打磨机器人具有吸尘功能;
[0014]
通过伸缩软管可在打磨机器人进行转动、伸曲时进行伸缩,使得不会干涉到打磨机器人的正常运行;
[0015]
而通过吸尘环管与定位圆环的配合设置,定位圆环可与旋转臂之间能够进行转动,这样定位圆环可使得吸尘环管在套在旋转臂上时,还不会干涉到旋转臂的正常转动。
附图说明
[0016]
图1为本实用新型的结构示意图。
[0017]
图2为本实用新型图1的a处局部放大示意图。
[0018]
图3为本实用新型旋转臂的横截面图。
[0019]
图1-3中:1-打磨机器人,101-底座,102-竖摇臂,103-横摇臂,104-旋转臂,105-打磨头,2-负压箱,3-滤尘袋,4-伸缩软管,5-高压风机,501-抽风管,6-吸尘钢管,7-吸尘环管,701-吸尘口,8-定位圆环,9-连接杆。
具体实施方式
[0020]
以下由特定的具体实施例说明本实用新型的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本实用新型的其他优点及功效。
[0021]
须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
[0022]
请参阅图1至图3:
[0023]
本实用新型提供一种工业加工机器人,包括打磨机器人1,下面对一种工业加工机器人的各个部件进行详细描述:
[0024]
打磨机器人1包括底座101、竖摇臂102、横摇臂103、旋转臂104和打磨头105,竖摇臂102铰接在底座101的上端,横摇臂103铰接在竖摇臂102的上端,旋转臂104转动连接在横摇臂103的右端,打磨头105铰接在旋转臂104的右端;
[0025]
具体的,竖摇臂102可在底座101上进行左右摇动,横摇臂103可在竖摇臂102上进行上下摇动,旋转臂104可在横摇臂103上进行360
°
旋转,打磨头105可在旋转臂104上进行上下摇动,并且还可对工件进行打磨;
[0026]
根据之上所述,底座101的左端固定连接有负压箱2,负压箱2的内部固定连接有滤尘袋3,负压箱2的顶部插接有伸缩软管4,负压箱2的左方固定设置有高压风机5,高压风机5进风口处固定连接有抽风管501,抽风管501的右端贯穿进负压箱2的内部,横摇臂103的上表面焊接有吸尘钢管6,吸尘钢管6的右端面焊接有吸尘环管7,吸尘环管7套在旋转臂104的
外周,吸尘环管7的右侧面均匀开设有若干个吸尘口701;
[0027]
具体的,高压风机5利用抽风管501可将负压箱2的内部以及滤尘袋3的内部抽成负压状态,当负压箱2的内部变成负压后,伸缩软管4、吸尘钢管6和吸尘环管7的内部也会变成负压,于是内部负压的吸尘环管7便可利用吸尘口701吸取打磨头105打磨产生的粉尘,接着再通过吸尘钢管6和伸缩软管4将粉尘排入滤尘袋3进行收集,于是通过这种结构,可以使得打磨机器人1具有吸尘功能;
[0028]
根据以上所述,旋转臂104的外圆周面上套有定位圆环8,定位圆环8位于吸尘环管7的内侧,定位圆环8的外圆周面与吸尘环管7的内侧面之间均匀焊接有若干个连接杆9;
[0029]
具体的,通过吸尘环管7与定位圆环8的配合设置,吸尘环管7通过连接杆2固定在定位圆环8上,而定位圆环8和旋转臂104之间镶嵌的滚动轴承,可使得定位圆环8在旋转臂104上能够进行转动,这样吸尘环管7在套在旋转臂104上时,还不会干涉到旋转臂104的正常旋转。
[0030]
上述实施例仅例示性说明本实用新型的原理及其功效,而非用于限制本实用新型。任何熟悉此技术的人士皆可在不违背本实用新型的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本实用新型所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本实用新型的权利要求所涵盖。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips