
 商标分类
商标分类  商标转让
商标转让 
化学机械平坦化工具的制作方法
 2021-01-30 10:01:40|
2021-01-30 10:01:40| 314|
314| 起点商标网
起点商标网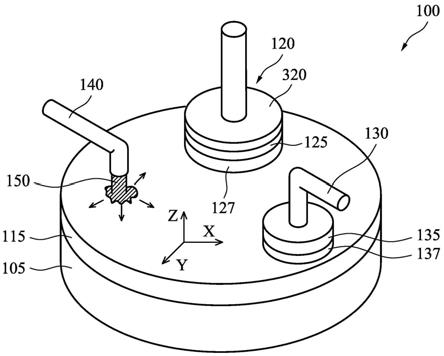
[0001]
本公开涉及一种化学机械平坦化工具及施行化学机械平坦化工艺的方法,尤其涉及一种用于晶片的化学机械平坦化工具及施行化学机械平坦化工艺的方法。
背景技术:
[0002]
通常,半导体装置包括形成在基板上的有源元件(active components),例如晶体管。可以在基板上方形成任意数量的互连层(interconnect layers),此互连层将有源元件彼此连接并与外部装置连接。互连层通常由包括金属沟槽/导孔的低k介电材料(low-k dielectric materials)制成。
[0003]
随着形成装置的各层,可以施行平坦化工艺(planarization processes),以将各层平坦化,以利于后续层的形成。举例来说,在基板中或在金属层中形成金属特征可能会导致形貌(topography)不均匀。这种不均匀的形貌可能对后续层的形成产生困难。举例来说,不均匀的形貌可能会干扰通常用于在装置中形成各种特征的光刻工艺(photolithographic process)。因此,在形成各种特征或层之后而平坦化装置的表面可以是有利的。
[0004]
化学机械研磨(chemical mechanical polishing,cmp)是集成电路形成中的一种常见做法。通常,化学机械研磨用于半导体晶片的平坦化。化学机械研磨利用物理力和化学力的协同作用(synergetic effect)来研磨晶片。通过晶片停留在研磨垫上时,向晶片背面施加负载力来施行化学机械研磨。将研磨垫放置抵靠晶片。然后,当包含研磨剂和反应性化学物质的浆料在其之间通过时,旋转研磨垫和晶片。化学机械研磨是实现晶片整体平坦化的有效方法。
技术实现要素:
[0005]
本公开的目的在于提供一种化学机械平坦化工具,以解决上述至少一个问题。
[0006]
本公开一些实施例提供一种化学机械平坦化工具,包括:一载体、一保持环以及一兆声波产生器。保持环附接至载体,且配置以在一化学机械平坦化工艺期间固持一晶片。兆声波产生器附接至载体,且配置以在化学机械平坦化工艺期间产生多个振动。
[0007]
本公开一些实施例提供一种施行一化学机械平坦化工艺的方法,包括:以第一旋转速度旋转一研磨垫、分配一浆料到研磨垫的一第一表面上、将一晶片压靠在该研磨垫的第一表面,晶片被一载体的一保持环所固持以及在化学机械平坦化工艺期间使用一兆声波产生器在研磨垫上产生多个振动。
[0008]
本公开一些实施例提供一种施行一化学机械平坦化工艺的方法,包括:通过附接到一载体的一保持环来固持一晶片、将晶片压靠在一研磨垫的一第一表面,研磨垫以一第一速度旋转、分配一浆料到研磨垫的第一表面上以及在研磨垫处产生多个振动。
附图说明
[0009]
当结合附图阅读时,根据以下详细描述可以最好地理解本公开的各方面。应注意的是,根据业界中的标准实践,各种特征未按比例绘制。实际上,为了使讨论清晰,各种特征的尺寸可以任意增加或减小。
[0010]
图1示出根据一实施例的化学机械平坦化设备的立体图。
[0011]
图2示出根据一实施例的图1的化学机械平坦化设备的俯视图。
[0012]
图3示出根据一实施例的图1的化学机械平坦化设备的剖视图。
[0013]
图4示出根据一实施例的图1的化学机械平坦化设备的研磨垫、晶片和兆声波(megasonic)产生器的放大剖视图。
[0014]
图5示出根据一实施例的提供给图1的化学机械平坦化设备的兆声波产生器的控制电压。
[0015]
图6示出根据另一实施例的提供给图1的化学机械平坦化设备的兆声波产生器的控制电压。
[0016]
图7示出根据又一实施例的提供给图1的化学机械平坦化设备的兆声波产生器的控制电压。
[0017]
图8示出根据一些实施例的用于施行化学机械平坦化工艺的方法的流程图。
[0018]
附图标记如下:
[0019]
100:化学机械平坦化设备
[0020]
105:平台
[0021]
106:轴
[0022]
115:研磨垫
[0023]
115h:空腔
[0024]
115p:峰
[0025]
116:开口
[0026]
120:研磨器头
[0027]
125:载体
[0028]
127:保持环
[0029]
130:垫调节器臂
[0030]
135:垫调节器头
[0031]
137:垫调节器
[0032]
140:浆料分配器
[0033]
150:浆料
[0034]
200:点
[0035]
215:双头箭头
[0036]
220:点
[0037]
225:双头箭头
[0038]
230:点
[0039]
235:双头箭头
[0040]
237:双头箭头
[0041]
300:晶片
[0042]
305:最底层
[0043]
307:上覆层
[0044]
310:薄膜
[0045]
320:兆声波产生器
[0046]
321:固持器
[0047]
323:压电转换器
[0048]
325:电性端子
[0049]
327:轴
[0050]
331:电源
[0051]
333:输出端子
[0052]
335:控制器
[0053]
340:导线
[0054]
410:研磨剂
[0055]
610a:控制电压脉冲
[0056]
610b:控制电压脉冲
[0057]
610c:控制电压脉冲
[0058]
610d:控制电压脉冲
[0059]
610e:控制电压脉冲
[0060]
1000:方法
[0061]
1010:步骤
[0062]
1020:步骤
[0063]
1030:步骤
[0064]
1040:步骤
[0065]
t0:时间
[0066]
t1:时间
[0067]
t2:时间
[0068]
t
a
:持续时间
[0069]
t
b
:持续时间
[0070]
vt:控制电压
[0071]
x:x轴
[0072]
y:y轴
[0073]
z:z轴
具体实施方式
[0074]
以下公开提供用于实现本公开的不同特征的许多不同的实施例或示例。以下描述组件和布置的特定示例以简化本公开。当然,这些仅是示例,并不旨在限制。举例来说,在下面的描述中在第二特征之上或上的第一特征的形成可以包括第一特征和第二特征直接接触形成的实施例,并且还可以包括在第一特征和第二特征之间形成额外特征的实施例,使
得第一和第二特征可以不直接接触。
[0075]
此外,为了便于描述,在本文中可以使用例如“在...下方”、“在...之下”、“在...下”、“在...上方”、“在...上”之类的空间相对术语,来描述如图所示的一个元件或特征与另一个元件或特征的关系。除了在图中描述的方位之外,空间相对术语还意图涵盖在使用或操作中的装置的不同方位。设备可以以其他方式定向(旋转90度或以其他方位),并且在此使用的空间相对描述语可以同样地被相应地解释。
[0076]
本公开的实施例相关于化学机械平坦化(chemical mechanical planarization,cmp)工具和工艺,并且特别地,在化学机械平坦化工艺期间使用兆声波产生器,在研磨垫产生振动以减少研磨剂聚集的化学机械平坦化工具和工艺。在一些实施例中,在化学机械平坦化工艺期间改变振动的模式,例如振动的频率、振动的振幅及/或振动的持续时间,以实现目标晶片研磨轮廓(target wafer polishing profile)。因此使用所公开的化学机械平坦化工具和工艺,实现化学机械平坦化工艺的改善的平面性和蚀刻速率。额外的优点包括降低将晶片推到研磨垫上的研磨压力,其减少晶片损坏。
[0077]
化学机械平坦化是一种使在制造半导体装置中产生的特征平坦化的方法。此工艺结合使用反应性化学浆料中的研磨材料与研磨垫。研磨垫通常具有比半导体晶片大的直径。在化学机械平坦化工艺中,将研磨垫和晶片压在一起。此工艺去除材料并倾向使不规则的形貌均匀化,从而使晶片平坦或实质平坦。这使晶片准备形成额外的上覆电路元件。举例来说,化学机械平坦化可以使整个晶片表面处于光刻系统的给定景深(depth of field)内。景深的通常规格的数量级是,例如,埃(angstroms)。在一些实施方式中,也可以运用化学机械平坦化,以基于材料在晶片上的位置来选择性地去除材料。
[0078]
在化学机械平坦化工艺中,将晶片放置在载体头(carrier head)(也称为载体)中,在其中通过保持环(retainer ring)将晶片固持在适当位置。然后,当向下的压力施加到晶片上以压靠研磨垫时,旋转载体头和晶片。将反应性化学溶液分配在研磨垫的接触表面上以帮助平坦化。晶片的表面因此可以使用机械和化学机制的组合来平坦化。
[0079]
图1示出根据一些实施例的化学机械平坦化设备100的立体图。化学机械平坦化设备100包括平台105和平台105上方的(例如,胶合到的)研磨垫115。在一些实施例中,研磨垫115包括材料(例如毛毡(felts)、聚合物浸渍毛毡(polymer impregnated felts)、微孔聚合物膜(microporous polymer films)、微孔合成皮革(microporous synthetic leathers)、填充聚合物膜(filled polymer films)、未填充纹理化聚合物膜(unfilled textured polymer films)、其组合等)的单层或复合层。代表性的聚合物包括聚氨酯(polyurethane)、聚烯烃(polyurethane)等。
[0080]
如图1所示,研磨器头120(也可以称为研磨头)被放置在研磨垫115上。研磨器头120包括载体125、保持环127、和兆声波产生器(megasonic generator)320。保持环127和兆声波产生器320使用机械紧固件(例如,螺钉等)或其他合适的附接装置安装到载体125。在图1的示例中,保持环127附接到载体125的下侧,并且兆声波产生器320附接到载体125的上侧。兆声波产生器320可以包括压电转换器(piezoelectric transducer,pzt)且配置以在化学机械平坦化工艺期间在载体125和在研磨垫115处产生振动。在下文将讨论关于兆声波产生器320的更多细节。
[0081]
在一代表性的化学机械平坦化工艺期间,工件(例如,半导体晶片;在图1中未示
出,但在下面关于图3而解说和描述)放置在载体125内且由保持环127所固持。在一些实施例中,保持环127具有实质中空的中心的大致环形形状。工件被放置在保持环127的中心,使得保持环127在化学机械平坦化工艺期间将工件固持在适当位置。工件定位成使得待研磨表面面朝朝向研磨垫115的方向(例如,向下)。载体125配置以施加向下的力或压力,以推压工件接触研磨垫115。在化学机械平坦化工艺期间,研磨器头120配置以在研磨垫115上方旋转工件,从而赋予机械研磨作用来影响工件的接触表面的或平坦化研磨。
[0082]
在一些实施例中,化学机械平坦化设备100包括浆料分配器140,其配置以将浆料150沉积到研磨垫115上。平台105配置以旋转,导致浆料150通过在保持环127中的多个凹槽分配到工件和平台105之间。多个凹槽可以从保持环127的外侧壁延伸到保持环127的内侧壁。
[0083]
浆料150的组成可以取决于待研磨或待去除的材料是什么类型。举例来说,浆料150可以包括反应物、研磨剂、表面活性剂、和溶剂。反应物可以是化学物质,例如氧化剂或水解剂(hydrolyzer),其与工件的材料产生化学反应,以协助研磨垫115研磨或去除材料。在将被去除的材料包括例如钨的一些实施例中,反应物可以是例如过氧化氢、重铬酸根(cr
2
o
7
)、过锰酸根(mno
4
)、四氧化锇(oso
4
);尽管可以交替地、结合地、连续地使用其他合适的反应物,例如羟胺(hydroxylamine)、高碘酸(periodic acid)、其他高碘酸盐(periodates)、碘酸盐(iodates)、过硫酸铵(ammonium persulfate)、过氧单硫酸盐(peroxomonosulfates)、过氧单硫酸(peroxymonosulfuric acid)、过硼酸盐(perborates)、丙二酰胺(malonamide)、其组合等。在其他实施例中,可以使用其他反应物去除其他类型的材料。举例来说,在要被去除的材料包括例如氧化物的实施例中,反应物可以包括,例如,硝酸(hno
3
)、氢氧化钾(koh)、氢氧化铵(nh
4
oh)、其组合等。
[0084]
研磨剂可以包括任何合适的颗粒,其与研磨垫115的相对机械运动结合,配置以研磨或使工件平坦化。在一些实施例中,研磨剂包括胶态氧化铝(colloidal aluminum oxide)。在一些实施例中,研磨剂包括氧化硅(silicon oxide)、氧化铝(aluminum oxide)、氧化铈(cerium oxide)、多晶钻石(polycrystalline diamond)、聚合物颗粒(例如,聚甲基丙烯酸酯(polymethacrylate)等)、其组合等。
[0085]
表面活性剂可用于帮助将反应物和研磨剂分散在浆料150内,并在化学机械平坦化工艺期间防止(或减少发生)研磨剂的聚集(agglomeration)。在一些实施例中,表面活性剂可以包括聚乙二醇(polyethylene glycol,peg)、聚丙烯酸(polyacrylic acid)、聚丙烯酸的钠盐(sodium salts of polyacrylic acid)、油酸钾(potassium oleate)、磺基琥珀酸盐(sulfosuccinates)、磺基琥珀酸盐衍生物(sulfosuccinate derivatives)、磺化胺(sulfonated amines)、磺化酰胺(sulfonated amides)、醇的硫酸盐(sulfates of alcohols)、烷基磺酸盐(alkylanyl sulfonates)、羧化醇(carboxylated alcohols)、烷基氨基丙酸(alkylamino propionic acids)、烷基亚氨基酸(alkyliminodipropionic acids)、其组合等。然而,这样的代表性实施例不旨在限于所列举的表面活性剂。本领域中技术人员将理解,可以替代地、结合地或连续地使用任何合适的表面活性剂。
[0086]
在一些实施例中,浆料150包括可以用于结合反应物、研磨剂和表面活性剂的溶剂,并允许此混合物移动并分散到研磨垫115上。在一些实施例中,溶剂包括,例如去离子水(deionized water,diw)、醇或其共沸混合物;然而,可以交替地、结合地或连续地运用其他
合适的溶剂。
[0087]
此外,如果需要,还可以添加其他添加剂,以帮助控制或使化学机械平坦化工艺在其他方面受益。例如,可以添加腐蚀抑制剂以帮助控制腐蚀。在一个特定的实施例中,腐蚀抑制剂可以是氨基酸(amino acid)例如甘氨酸(glycine)。然而,可以使用任何合适的腐蚀抑制剂。
[0088]
在另一个实施例中,螯合剂被添加到浆料150。螯合剂可以是药剂(agent)例如乙二胺四乙酸(ethylenediaminetetraacetic acid,edta)、c
6
h
8
o
7
、c
2
h
2
o
4
、其组合等。但是,可以使用任何合适的螯合剂。
[0089]
在又一实施例中,浆料150包括ph调节物,以控制浆料150的ph值。举例来说,可以将例如盐酸(hcl)、硝酸(hno
3
)、磷酸(h
3
po
4
)、顺丁烯二酸(c2h
2
(cooh)
2
)、氢氧化钾(koh)、氨(nh
4
oh)、其组合等的ph调节物,添加到浆料150,以向上或向下调节浆料150的ph值。
[0090]
此外,还可以添加其他添加剂来帮助控制和管理化学机械平坦化工艺。举例来说,还可以添加向下力(down-force enhancer)增强剂(例如,有机化合物)、研磨速率抑制剂等。可以使用可能对研磨工艺有用的任何合适的添加剂,且所有这样的添加剂完全旨在包括在实施例的范围内。
[0091]
在一些实施例中,化学机械平坦化设备100包括附接至垫调节器头135的垫调节器137。垫调节器头135配置以在研磨垫115上旋转垫调节器137。垫调节器137使用机械紧固件(例如,螺钉等)或者通过其他合适的附接装置安装到垫调节器头135。垫调节器臂130附接到垫调节器头135,并且配置以横扫研磨垫115的区域的运动移动垫调节器头135和垫调节器137。在一些实施例中,垫调节器头135使用机械紧固件(例如,螺钉等)或者通过其他合适的附接装置安装到垫调节器臂130。垫调节器137包括基板,在基板上结合有大量的研磨剂颗粒。垫调节器137在化学机械平坦化工艺期间从研磨垫115移除累积的晶片碎片和过多的浆料150。在一些实施例中,垫调节器137还作为用于研磨垫115的研磨剂,以对可被研磨工件更新、或者产生期望的纹理(诸如,例如,凹槽等)。
[0092]
如图1所示,化学机械平坦化设备100具有单一研磨器头(例如,120)和单一研磨垫(例如,115)。然而,在其他实施例中,化学机械平坦化设备100可以具有多个研磨器头或多个研磨垫。在化学机械平坦化设备100具有多个研磨器头和单一研磨垫的一些实施例中,可以同时研磨多个工件(例如,半导体晶片)。在化学机械平坦化设备100具有单一研磨器头和多个研磨垫的其他实施例中,化学机械平坦化工艺可包括多步骤工艺。在这样的实施例中,第一研磨垫可用于从晶片去除块状材料,第二研磨垫可用于晶片的整体平坦化,且第三研磨垫可例如用于磨亮(buff)晶片的表面。在一些实施例中,化学机械平坦化处理的不同阶段可以使用不同的浆料组成。在又一其他实施例中,所有化学机械平坦化阶段可以使用相同的浆料组成。
[0093]
图2示出根据一些实施例的图1的化学机械平坦化设备100的俯视图(或平面图)。平台105(位于图2的研磨垫115的下方)配置以顺时针或逆时针方向(由围绕延伸穿过居中设置的点200(其是平台105的中心点)的轴的双头箭头215所指示)而旋转。研磨器头120配置以顺时针或逆时针方向(由围绕延伸穿过点220(其是研磨器头120的中心点)的轴的双头箭头225所指示)而旋转。穿过点200的轴平行于穿过点220的轴。在示出的实施例中,穿过点200的轴与穿过点220的轴间隔开。垫调节器头135配置以顺时针或逆时针方向(由围绕延伸
穿过点230(其是垫调节器头135中心点)的轴的双头箭头235所指示)而旋转。穿过点200的轴平行于穿过点230的轴。垫调节器臂130配置以在平台105旋转期间在研磨垫115的整个表面上(例如,由双头箭头237所指示)移动垫调节器头135。
[0094]
随着特征尺寸在先进的半导体工艺世代(advanced semiconductor processing nodes)持续缩小,对于在晶片上的各种层的平面性的要求变得更严格。在一些先进的技术世代(advanced technology nodes)中,在化学机械平坦化工艺的浆料中使用纳米尺寸的研磨剂。纳米尺寸研磨剂(也被称为纳米颗粒、或纳米研磨剂颗粒)的大小(例如,直径)可以小于约30纳米(nm),例如约3纳米至约5纳米之间。使用纳米研磨剂颗粒的浆料也被称为纳米研磨剂浆料。相反地,公知浆料中的研磨剂的尺寸(例如,直径)可以大于35纳米,例如在约50纳米至约100纳米之间。
[0095]
虽然使用纳米研磨剂浆料的化学机械平坦化工艺可以实现较佳的平面性,但仍然存在许多挑战。举例来说,如果仅通过用纳米研磨剂浆料代替公知浆料来施行化学机械平坦化工艺,则使用纳米研磨剂浆料的化学机械平坦化工艺的蚀刻速率(也称为去除速率)可能非常缓慢,例如小于每分钟200埃。由于需要长的化学机械平坦化工艺时间,所以对于在制造中使用这种缓慢的蚀刻速率可能是不切实际的。为了补偿使用纳米研磨剂浆料的缓慢蚀刻速率,公知化学机械平坦化工艺可能必须增加用于将晶片压靠在研磨垫115上的力/压力(为了便于讨论,以下可以称为研磨压力)、或增加在化学机械平坦化工艺中使用的浆料的流率。然而,增加研磨压力可能增加晶片损坏的风险,例如晶片上的刮痕或破裂。增加研磨压力也可能使得浆料难以在研磨垫115和晶片之间流动,其可能导致研磨工艺的不想要的表现。此外,增加浆料的流率也增加浆料的损耗,其增加制造成本。
[0096]
使用纳米研磨剂浆料的化学机械平坦化工艺的另一个挑战是研磨剂聚集,这是指浆料中的研磨剂不均匀分布在研磨垫115的整个表面上,并且可能在某些位置聚集,例如在研磨垫115的上表面处的开口116(参见图4)中。
[0097]
暂时参考图4,其示出(一部分的)研磨垫115、晶片300和兆声波产生器320的剖视图。如图4所示,研磨垫115可以是多孔的并且在其中可以具有空腔115h。开口116可以至少部分地由在研磨垫115的上表面处暴露的空腔所形成。图4还示出在浆料中使用的研磨剂410,研磨剂410可能聚集在开口116中,而不是在研磨垫115的峰115p的顶表面(例如,在上表面处的突起部分)上。在化学机械平坦化工艺期间,在开口116中的研磨剂410可能不与晶片300接触,因此是不起作用的,其降低浆料的效率且导致化学机械平坦化工艺中的蚀刻速率降低。在另一方面,如果研磨剂410在峰115p的顶表面处的某些地点聚集,这些地点可能发生过蚀刻(over-etching),其可能导致晶片300的表面上的局部凹陷(dishing)。本文所讨论的各种实施例通过使用兆声波产生器320防止或减少研磨剂聚集,从而实现化学机械平坦化工艺改善的蚀刻速率和更好的表面平面性。此外,所公开的实施例允许在化学机械平坦化工艺中使用较低的研磨压力和较低的浆料流率,从而降低晶片损坏的风险,并且降低制造成本,其细节在下文讨论。
[0098]
现在参考图3,其示出根据实施例的图1的化学机械平坦化设备100的剖视图。应注意的是,为了清楚起见,在图3中并未示出化学机械平坦化设备100的所有特征。如图3中所示,平台105(其上附接有研磨垫115)围绕轴106旋转。研磨器头120包括载体125、保持环127和兆声波产生器320,并且围绕轴327旋转。平台105和研磨器头120可以相同方向或以相反
方向旋转。
[0099]
在图3的示例中,载体125包括配置以在化学机械平坦化工艺期间介接晶片300的薄膜(membrane)310。在一些实施例中,化学机械平坦化设备100包括耦接到研磨器头120的真空系统,且薄膜310配置以使用例如,真空抽吸而拾取并将晶片300固持在薄膜310上。薄膜310可以自身或与载体125的下侧形成封闭空间。在化学机械平坦化工艺期间,封闭空间内的压力(也可以称为薄膜的内部压力)可以维持在预定等级,使得膨胀的薄膜310将晶片300向下推向研磨垫115。通过调节薄膜310的内部压力,可以调节研磨压力。
[0100]
仍然参照图3,兆声波产生器320包括固持器321、电性端子(electrical terminals)325、和压电转换器(piezoelectric transducer,pzt)323。可以使用固持器321来固持压电转换器323,并将兆声波产生器320附接到轴327。固持器321还可以包括将电性端子325与压电转换器323电性耦接的电路。用于控制压电转换器323的操作的控制电压vt通过电源331施加到电性端子325,以产生振动。电源331可包括可控电压源和功率放大器,以在输出端子333处产生控制电压vt。在电源331的输出端子333处的控制电压随后通过导线340(例如,铜线)被提供到电性端子325。在一些实施例中,导线340走线穿过轴327的内部(其可以是中空的),以与电源331连接。
[0101]
图3进一步示出电性耦接到电源331的控制器335。控制器335可以指示和控制电源331,以产生具有不同参数的控制电压,以通过压电转换器323产生不同的振动模式,其细节在下面参考图5到图7讨论。在一些实施例中,电源331和控制器335在兆声波产生器320的外部,因此不是兆声波产生器320的一部分。在一些实施例中,电源331和控制器335被一体化到兆声波产生器320中,因此是兆声波产生器320的一部分。
[0102]
如图3所示,压电转换器323附接到载体125。在化学机械平坦化工艺期间,当控制电压vt被施加到压电转换器323,压电转换器323的移动产生振动,振动通过物理接触或其他传输媒介(例如,浆料)被传输到例如载体125、保持环127和研磨垫115。兆声波产生器320所产生的振动可以沿着与研磨垫115的上表面平行的平面(例如,由图1中的x轴和y轴所界定的平面)内的第一方向、沿着垂直于研磨垫115的上表面的第二方向(例如,沿图1中的z轴)、或者沿着第一方向和第二方向。尽管在图3中将兆声波产生器320示出为安装在载体125上并且围绕轴327旋转,但是兆声波产生器320的其他配置或地点也是可能的,并且完全旨在包括在本公开的范围内。举例来说,兆声波产生器320可以安装在平台105的下表面处,并且可以围绕轴106旋转。
[0103]
在一些实施例中,晶片300是半导体晶片,其包括,举例来说,半导体基板(例如,包括硅、iii族-v族半导体材料等)、形成在半导体基板中或上的有源装置(例如,晶体管等)以及各种互连结构。代表性的互连结构可以包括导电特征,其电性连接有源装置,以形成功能电路。在各种实施例中,可以在制造的任何阶段期间将化学机械平坦化工艺应用于晶片300,以平坦化特征或以其他方式去除晶片300的材料(例如,介电材料、半导体材料、导电材料等)。晶片300可以包括上面标识的特征的任何子集合(subset)以及其他特征。
[0104]
如图3所示,晶片300包括最底层305和上覆层307。在化学机械平坦化工艺期间,最底层305受到研磨/平坦化。在一些实施例中,最底层305包括金属,例如钨、铜、钴、钛、钌、其组合等。在一些实施例中,最底层305包括介电材料,例如氧化硅、氮化硅、其组合等。在一些实施例中,最底层305包括半导体材料,例如硅、多晶硅、硅锗、碳化硅、其组合等。可以研磨
最底层305以形成例如接触晶片300的各种有源装置的接触塞(contact plugs)。在最底层305包括铜的实施例中,可以研磨最底层305以形成例如晶片300的各种互连结构。在最底层305包括介电材料的实施例中,可以研磨最底层305以在晶片300上形成例如浅沟槽隔离(shallow trench isolation,sti)结构。
[0105]
在一些实施例中,最底层305可以由于在最底层305的沉积期间经历的工艺变化而导致具有不均匀的厚度(例如,展现出最底层305的暴露表面的局部或整体形貌变化)。举例来说,在被平坦化的最底层305包括钨的实施例中,可以通过使用化学气相沉积(chemical vapor deposition,cvd)工艺将钨沉积到穿过介电层的开口中,来形成最底层305。由于化学气相沉积工艺的变化或其他下面的结构,最底层305可能具有不均匀的厚度。
[0106]
在一些实施例中,可以使用椭圆偏振技术(ellipsometry)、干涉法(interferometry)、反射测量术(reflectometry)、皮秒超声波(picosecond ultrasonics)、原子力显微术(atomic force microscopy,afm)、扫描穿隧显微术(scanning tunneling microscopy,stm)、扫描电子显微术(scanning electron microscopy,sem)、穿透式电子显微术(transmission electron microscopy,tem)等来测量最底层305的厚度轮廓。在一些实施例中,厚度测量设备(未示出)可以在化学机械平坦化设备100的外部,并且可以在将晶片300装载到化学机械平坦化设备100中之前测量或以其他方式确定最底层305的厚度轮廓。在其他实施例中,厚度测量设备可以是化学机械平坦化设备100的一部分,并且可以在将晶片300装载到化学机械平坦化设备100中之后测量或以其他方式确定最底层305的厚度轮廓。
[0107]
在测量之后,可以通过化学机械平坦化设备100来平坦化最底层305。在特定实施例中,可以降低研磨器头120,使得晶片300的最底层305与研磨垫115物理接触。另外,浆料150也被引入到研磨垫115上,使得浆料150将与最底层305的暴露表面接触。举例来说,浆料150可以以约每分钟100立方厘米(cc/min)至约每分钟500立方厘米之间的流率(例如约每分钟250立方厘米)而引入。晶片300的表面(例如,最底层305)因此可以使用机械力和化学力的组合来平坦化。
[0108]
现在参考图4,其示出一部分的研磨垫115、一部分的晶片300和一部分的兆声波产生器320的放大剖视图。在化学机械平坦化工艺期间,由兆声波产生器320产生的振动有助于将研磨剂410均匀地分布在研磨垫115的整个上表面。举例来说,聚集在开口116的底部(例如,在相邻的峰115p之间)的一些研磨剂410可以是被振动搅起并分布到峰115p的顶表面(例如,在峰115p和晶片300之间),因此成为参与研磨工艺的有效研磨剂410。因此,化学机械平坦化工艺的蚀刻速率可以达到例如对于氧化膜每分钟3000埃或更大,这可以比不使用兆声波产生器320的化学机械平坦化工艺好10%至20%。研磨剂410的均匀分布还降低局部凹陷效应,因此对研磨的晶片表面实现更好的平面性。
[0109]
在一些实施例中,通过兆声波产生器320产生的振动的频率在约10千赫(khz)至约50千赫之间(可以与控制电压vt的频率相同或成比例)。小于10千赫的振动频率可能太低,而对减少研磨剂聚集无效。然而,大于50千赫的振动频率可能太高,且可能损坏晶片300(例如,可能损坏晶片300的表面)。
[0110]
在一些实施例中,平台105的旋转速度在约每分钟30转(rounds per minute,rpm)至约每分钟120转之间,并且研磨器头120的旋转速度在约每分钟30转至约每分钟120转之
间。如果平台105和研磨器头120的旋转速度低于约每分钟30转,则旋转速度可能太低,并且振动的影响可能限制在晶片表面的局部区域太久,并且可能导致晶片表面不同局部区域的蚀刻速率不均匀。举例来说,可以从开口116的底部搅起研磨剂410,但是可能不够快地分布到其他区域,这可能产生具有比具有较少开口116的其他局部表面区域更高的研磨剂浓度的局部表面区域。因此,在不同局部区域的蚀刻速率可能不同,并且可能导致蚀刻速率不均匀。另一方面,如果平台105和研磨器头120的旋转速度高于约每分钟120转,则浆料的有效性可能降低。这可能是由于新鲜浆料太快分散在垫表面之上,这可能会导致一个非常薄的新鲜浆料层,从而降低化学机械平坦化工艺的蚀刻速率。
[0111]
在一些实施例中,研磨垫115的孔隙率(porosity)在约10%至约80%之间,例如在约30%至约60%之间,或在约40%至约50%之间。对于具有较低孔隙率(例如,小于10%)的研磨垫115,由于非常少研磨剂聚集在开口116中,因此兆声波产生器320的好处可能不够显着以证明兆声波产生器320的成本是合理的。如果孔隙率太高(例如,大于80%),则兆声波产生器320的有效性可能受到限制。这是因为在研磨垫115的上表面处具有高浓度的开口116,峰115p的顶表面的总面积(在化学机械平坦化工艺期间,有效研磨剂410的停留处)太有限。换句话说,无效的研磨剂颗粒410,通过振动从开口116的底部搅起,可能落回到另一开口116中,因此仍是无效的研磨剂颗粒。
[0112]
由于通过所公开的实施例实现改善的蚀刻速率,因此不需要增加浆料的流率和研磨压力。在一些实施例中,浆料的流率在约每分钟100立方厘米至约每分钟500立方厘米之间,例如约每分钟250立方厘米。本公开所允许的浆料的低流率降低与浆料消耗相关联的制造成本。在一些实施例中,由于由本公开允许的低研磨压力,在化学机械平坦化工艺期间,薄膜310的内部压力可以设定在约0.5磅力每平方英寸(psi)至约3磅力每平方英寸之间,这低于用于没有兆声波产生器320的公知化学机械平坦化工艺的约1磅力每平方英寸至约5磅力每平方英寸之间的范围。较低的研磨压力减少晶片损坏。此外,在化学机械平坦化工艺中使用兆声波产生器320还实现比公知化学机械平坦化工艺更好的表面平面性。举例来说,使用所公开的实施例的已研磨晶片表面的形貌(例如,不均匀度)是使用公知化学机械平坦化工艺的已研磨晶片表面的形貌的约10%至约50%。
[0113]
在一实施例中,图5示出提供给兆声波产生器320的控制电压。图5的x轴表示时间,而y轴表示振幅。图5的控制电压是具有预定频率(例如,约10千赫至约50千赫)的连续波(例如,正弦波或余弦波)信号。在所示的实施例中,控制电压的频率与兆声波产生器320的振动频率相同或成比例。在一些实施例中,在化学机械平坦化工艺之后,调节控制电压的频率以实现目标研磨表面轮廓。回想一下,可以在化学机械平坦化工艺之前测量晶片300的最底层305的厚度轮廓。所测量的最底层305的厚度轮廓可用于确定例如兆声波产生器320的控制电压的频率。在一些实施例中,调节控制电压的振幅以在化学机械平坦化工艺之后实现获得目标研磨表面轮廓。在一些实施例中,调整控制电压的频率和振幅都以在化学机械平坦化工艺之后实现目标研磨表面轮廓。
[0114]
图6示出在另一实施例中提供给兆声波产生器320的控制电压。图6的x轴表示时间,而y轴表示振幅。图6中的控制电压包括控制电压脉冲(例如,610a、610b),其中每个控制电压脉冲包括相同于或类似于图5的控制电压的一或多个连续波控制电压循环(例如,周期)。举例来说,每个控制电压脉冲可以具有约1毫秒(ms)至约300毫秒之间的持续时间。在
一些实施例中,每个控制电压脉冲具有第一频率,并且在兆声波产生器320处以第二频率产生振动,其中第二频率与第一频率相同或成比例。
[0115]
在图6的示例中,可以独立地调节每个控制电压脉冲(例如,610a,或610b)的振幅、频率及/或持续时间,以实现目标研磨表面轮廓,因此不同于另一控制电压脉冲的振幅、频率及/或持续时间。如图6所示,每个控制电压脉冲与相邻的控制电压脉冲分开一静默时段(例如,没有控制电压或零控制电压的时间段,其对应于在兆声波产生器320处没有产生振动)。在一些实施例中,可以单独地调整相邻的控制电压脉冲之间的持续时间(例如,参见图6中的t
a
和t
b
),且因此彼此不同。在图6的示例中,控制电压可包括具有大振幅的控制电压脉冲(例如610a、610c、610d)以及散布在具有大振幅的控制电压脉冲之间的具有小振幅的控制电压脉冲(例如610b、610e)。每个具有大振幅的控制电压脉冲(例如610a、610c、或610d)可以具有在其振幅的偏差(例如,非零平均值),且因此,可以包括在非零平均值附近振荡的一或多个连续波控制电压周期。举例来说,控制电压610a具有正偏差,而控制电压610c具有负偏差。另外,在一些实施例中,具有大振幅的控制电压脉冲(例如610a,610c或610d)对于其偏差可以具有交替的正负值(例如正或负)。图6中的每个具有小振幅的控制电压脉冲(例如610b、610e)可以具有零平均值,或者可以具有例如小于大控制电压(例如610a、610c、610d)的偏差的10%的小正偏差或小负偏差。图6所示的控制电压的图案仅是非限制性示例,其他图案也是可能的,并且完全旨在被包括在本公开的范围内。
[0116]
图6所示的控制电压在微调化学机械平坦化工艺中具有许多自由度以实现目标研磨表面轮廓。本领域中技术人员将理解,尽管以上讨论描述为单独调节每个控制电压脉冲,但是在实施例中,一些或全部的控制电压脉冲共用相同的参数(例如,每个控制电压脉冲的振幅、频率、持续时间及/或相邻的控制电压脉冲之间的持续时间)都完全旨在被包括在本公开的范围内。
[0117]
图7示出另一实施例的控制电压,其中控制电压在化学机械平坦化工艺的不同阶段动态地改变。图7的x轴表示时间,而y轴表示频率。在所示的实施例中,控制电压的频率与兆声波产生器320处的振动频率相同或成比例。在图7中,在时间t0至t1之间,化学机械平坦化工艺处于增强(ramp-up)阶段,并且增强控制电压的频率,以准备进入化学机械平坦化工艺的主研磨阶段。在时间t1至时间t2之间,化学机械平坦化工艺处于主研磨阶段,其中使用第一控制电压频率(例如,在约20千赫至约26千赫之间)以相对高的蚀刻速率来研磨晶片。在时间t2至时间t3之间,在化学机械平坦化处理进入磨亮研磨步骤,其中使用比第一控制电压的频率更小的第二控制电压频率(例如,约5千赫至约15千赫之间)以更慢的蚀刻速率磨亮晶片。在时间t3之后,化学机械平坦化工艺进入去吸座(de-chuck)阶段,其中晶片准备好从保持环127移除。在去吸座阶段使用第三控制电压频率(例如,小于4千赫),其可以小于第二控制电压频率。图7的示例进一步示出在第三控制电压频率稳定在约4千赫之前、在时间t3(例如约3到5秒)之后的第三控制电压频率的暂时降低。可以实施暂时降低(例如,以约2千赫的控制电压频率)以顺应(accommodate)研磨头,研磨头在去吸座阶段的开始可能是不稳定的。
[0118]
实施例可以实现优点。举例来说,兆声波产生器减少研磨剂聚集,并有助于沿着研磨垫的表面均匀地分配研磨剂,从而提高化学机械平坦化工艺的蚀刻速率,并对已研磨晶片表面实现较佳的平面性。所公开的化学机械平坦化工具允许施加低研磨压力(例如,约
0.5磅力每平方英寸至约3磅力每平方英寸之间)到晶片,从而降低与大研磨压力有关的晶片损坏的风险。相较于公知化学机械平坦化工艺,可以将化学机械平坦化工艺中使用的浆料的流率保持较低,这节省与浆料消耗相关联的制造成本。尽管使用纳米研磨剂浆料的示例来讨论本公开,但是所公开的实施例可以应用于使用具有其他尺寸(例如,在2纳米至约300纳米之间的直径)的研磨剂的化学机械平坦化工艺。
[0119]
图8示出根据一些实施例的用于施行化学机械平坦化工艺的方法1000的流程图。应理解的是,图8所示的实施例方法仅是许多可能的实施例方法的示例。本领域中技术人员将认识到许多变型、替代和修改。举例来说,可以添加、去除、替换,重新布置和重复如图8所示的各个步骤。
[0120]
参考图8,在步骤1010中,通过附接到载体的保持环来固持晶片。在步骤1020中,将晶片压靠在研磨垫的第一表面,以第一速度旋转研磨垫。在步骤1030中,将浆料分配在研磨垫的第一表面上。在步骤1040中,在研磨垫处产生振动。
[0121]
根据本公开一些实施例,提供一种化学机械平坦化工具,包括:一载体、一保持环以及一兆声波产生器。保持环附接至载体,且配置以在一化学机械平坦化工艺期间固持一晶片。兆声波产生器附接至载体,且配置以在化学机械平坦化工艺期间产生多个振动。
[0122]
在一实施例中,兆声波产生器包括一压电转换器。在一实施例中,兆声波产生器配置以产生具有在约10千赫至约50千赫之间的一频率的振动。在一实施例中,兆声波产生器配置以沿着与晶片的一主表面平行的一平面内的方向或沿着晶片的主表面垂直的一方向而产生振动。在一实施例中,化学机械平坦化工具还包括:一平台以及一研磨垫。研磨垫附接到平台的一上表面,其中载体配置以在化学机械平坦化工艺期间将晶片压靠在研磨垫。在一实施例中,研磨垫的一孔隙率在约10%至约80%之间。在一实施例中,化学机械平坦化工具还包括一浆料分配器,配置以在化学机械平坦化工艺期间分配一浆料到该研磨垫上,其中在浆料中的多个研磨剂的其中一个直径小于约30纳米。
[0123]
根据本公开另一些实施例,提供一种施行一化学机械平坦化工艺的方法,包括:以第一旋转速度旋转一研磨垫、分配一浆料到研磨垫的一第一表面上、将一晶片压靠在该研磨垫的第一表面,晶片被一载体的一保持环所固持以及在化学机械平坦化工艺期间使用一兆声波产生器在研磨垫上产生多个振动。
[0124]
在一实施例中,第一旋转速度为在约每分钟30转至约每分钟120转之间,其中此方法还包括以在约每分钟30转至约每分钟120转之间的一第二旋转速度旋转晶片。在一实施例中,产生振动的操作包括使用兆声波产生器产生具有在约10千赫至约50千赫之间的一频率的振动。在一实施例中,研磨垫的一孔隙率在约10%至约80%之间。在一实施例中,浆料中的多个研磨剂的其中之一直径小于约30纳米。在一实施例中,分配浆料的操作包括在化学机械平坦化工艺期间以约每分钟0.1公升至约每分钟0.5公升之间的一流率将浆料分配到研磨垫的第一表面上。在一实施例中,载体包括一薄膜,薄膜在化学机械平坦化工艺期间与晶片接触,其中压靠晶片的操作包括以一预定压力等级使薄膜膨胀,以将晶片压靠在研磨垫的第一表面,预定压力等级在约0.5磅力每平方英寸至约3磅力每平方英寸之间。在一实施例中,产生振动的操作包括:在化学机械平坦化工艺的一主研磨步骤期间以一第一振动频率产生振动、在化学机械平坦化工艺期间的一磨亮研磨步骤期间以小于第一振动频率的一第二振动频率产生振动以及在化学机械平坦化工艺期间的一去吸座步骤期间以小于
第二振动频率的一第三振动频率产生振动。在一实施例中,产生振动的操作包括产生一第一振动脉冲以及与第一振动脉冲分开一无震动时间段的一第二振动脉冲,其中第一振动脉冲的一第一振幅不同于第二振动脉冲的一第二振幅。
[0125]
根据本公开又另一些实施例,提供一种施行一化学机械平坦化工艺的方法,包括:通过附接到一载体的一保持环来固持一晶片、将晶片压靠在一研磨垫的一第一表面,研磨垫以一第一速度旋转、分配一浆料到研磨垫的第一表面上以及在研磨垫处产生多个振动。
[0126]
在一实施例中,产生振动的操作包括使用附接到载体的一兆声波产生器来产生具有在约10千赫至约50千赫之间的一振动频率的振动,兆声波产生器包括一压电转换器。在一实施例中,第一速度在约每分钟30转至约每分钟120转之间,且此方法还包括以在约每分钟30转至约每分钟120转之间的一第二速度旋转载体。在一实施例中,产生振动的操作包括在化学机械平坦化工艺的一第一阶段期间产生具有一第一振动频率的振动,并在化学机械平坦化工艺的一第二阶段期间产生具有不同于第一振动频率的一第二振动频率的振动。
[0127]
前述概述数个实施例的特征,使得本领域中技术人员可以更好地理解本公开的各方面。本领域中技术人员应当理解,他们可以轻易地将本公开用作设计或修改其他工艺和结构的基础,以实行与本文介绍的实施例相同的目的及/或实现与本文介绍的实施例相同的优点。本领域中技术人员还应该认识到,这样的均等构造不脱离本公开的精神和范围,并且在不脱离本公开的精神和范围的情况下,他们可以于此进行各种改变、替换和变更。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips