
 商标分类
商标分类  商标转让
商标转让 
一种进出料装置的制作方法
 2021-01-29 18:01:47|
2021-01-29 18:01:47| 224|
224| 起点商标网
起点商标网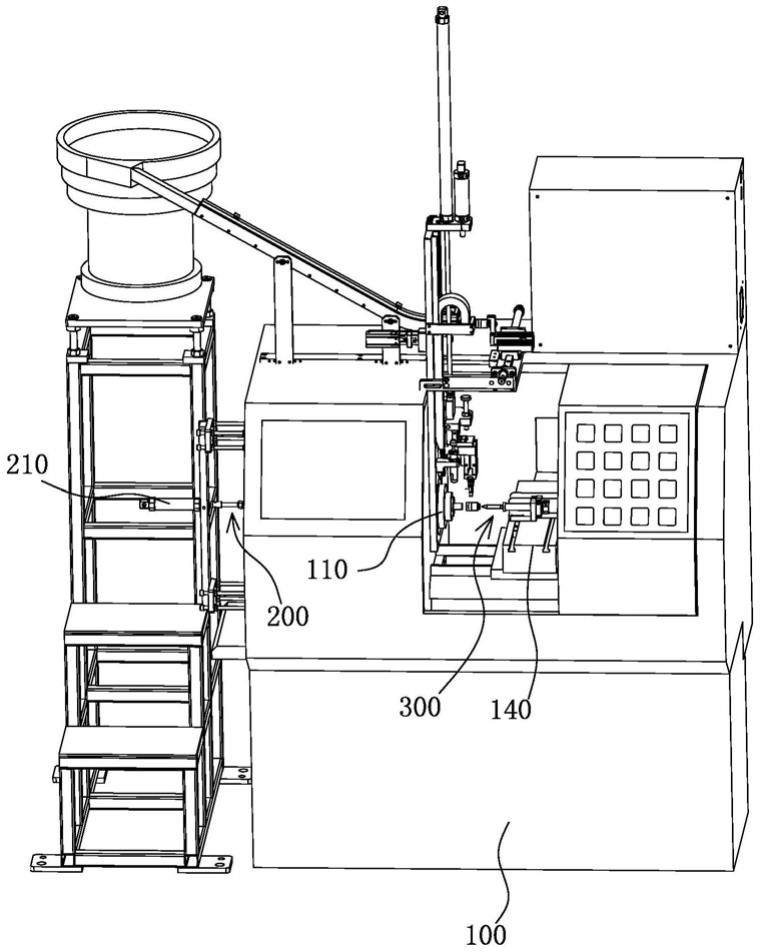
[0001]
本实用新型属于工件夹持设备技术领域,涉及一种进出料装置。
背景技术:
[0002]
数控机床是数字控制机床的简称,是一种装有程序控制系统的自动化机床。该控制系统能够逻辑地处理具有控制编码或其他符号指令规定的程序,并将其译码,用代码化的数字表示,通过信息载体输入数控装置。经运算处理由数控装置发出各种控制信号,控制机床的动作,按图纸要求的形状和尺寸,自动地将零件加工出来,因此,数控机床能较好地解决复杂、精密、小批量、多品种的零件加工问题,是一种柔性的、高效能的自动化机床,代表了现代机床控制技术的发展方向,是一种典型的机电一体化产品,而在现有技术中,大部分的数控机床在加工工件的过程中,往往是通过机械手夹持工件的侧面才能将工件输送至数控机构的夹持台内,并机械手夹持工件的侧面才能将加工完成的工件从数控机构的夹持台内夹持出来,而在此过程中,机械手极易损坏工件的侧面,导致零件报废。
技术实现要素:
[0003]
本实用新型的目的是针对现有的技术存在上述问题,提出了一种能提高对工件防护性的进出料装置。
[0004]
本实用新型的目的可通过下列技术方案来实现:
[0005]
一种进出料装置,包括机壳,所述机壳内设有夹持台,所述机壳内安装有左送料机构,所述左送料机构活动穿过夹持台;
[0006]
右送料机构,安装于机壳内,所述右送料机构可相对机壳移动,当工件位于左送料机构与右送料机构之间后,左送料机构与右送料机构将工件移送至夹持台内。
[0007]
在上述的一种进出料装置中,所述左送料机构包括活动穿过夹持台的第四移杆,所述机壳的一侧设有用于推动第四移杆运动的第四气缸,所述机壳内设有用于安装右送料机构的工作台。
[0008]
在上述的一种进出料装置中,所述右送料机构包括设于工作台上的第五气缸,所述第五气缸上设有第五移杆。
[0009]
在上述的一种进出料装置中,所述第四移杆的一端沿其中心轴线呈环形阵列设置有多个卡爪,所述第五移杆的一端设有移动块,所述移动块上设有一对长杆以及一对短杆。
[0010]
在上述的一种进出料装置中,两个所述长杆以移动块的中心对称,两个所述短杆以移动块的中心对称,所述长杆与相邻的短杆之间圆周角为直角。
[0011]
在上述的一种进出料装置中,所述第四移杆的一端设有柱体,所述第五移杆的一端设有顶针,所述第五移杆上套设有第一挡环。
[0012]
在上述的一种进出料装置中,所述第四移杆的一端设有左顶柱,所述第五移杆的一端设有右顶柱。
[0013]
与现有技术相比,本实用新型具有以下有益效果:
[0014]
1、在本实用新型的实施例一、实施例二以及实施例三中,左送料机构与右送料机构移送工件的过程中,该左送料机构与右送料机构并未直接接触工件的外表面,从而避免该工件的外侧面在转移过程中,发生磨损的情况。
[0015]
2、通过左送料机构以及右送料机构的同步作用,有效提高该全自动数控机床对工件的稳定输送。
[0016]
3、通过实施例四的控制方法,使得该实施例中的进出料装置能够适用于管状类工件。
[0017]
4、通过该实施例五的方案,使得该进出料装置能够适用于实心的柱体类工件。
[0018]
5、通过该实施例六的方案,使得该进出料装置能够适用于柱体类工件或者管状类工件。
附图说明
[0019]
图1是本实用新型一较佳实施例的结构示意图。
[0020]
图2是实施例一中左送料机构与右送料机构的组合图。
[0021]
图3是实施例二中左送料机构与右送料机构的组合图。
[0022]
图4是实施例三中左送料机构与右送料机构的组合图。
[0023]
图5是固定套的结构示意图。
具体实施方式
[0024]
以下是本实用新型的具体实施例并结合附图,对本实用新型的技术方案作进一步的描述,但本实用新型并不限于这些实施例。
[0025]
实施例一
[0026]
如图1—图2和图5所示,本实用新型一种进出料装置包括机壳100、夹持台110、工作台140、左送料机构200以及右送料机构300。
[0027]
机壳100内设有夹持台110,机壳100内安装有左送料机构200,所述左送料机构200活动穿过夹持台110;右送料机构300安装于机壳内,所述右送料机构可相对机壳移动,所述左送料机构200的中心轴线与右送料机构300的中心轴线重合,当工件位于左送料机构200与右送料机构300之间后,左送料机构200与右送料机构300将工件移送至夹持台110内,进一步的,机壳内设有用于安装右送料机构的工作台。
[0028]
在进出料装置工作过程中,当将工件位于左送料机构200与右送料机构300之间时,并使得左送料机构200的中心轴线、右送料机构300的中心轴线以及工件的中心轴线位于同一直线上后,通过左送料机构200与右送料机构300的配合作用,将工件移送至夹持台110内,左送料机构200复位,夹持台110将工件卡住,右送料机构300复位,该全进出料装置所对应的数控机床对工件进行加工,当工件加工完成后,左送料机构200以及右送料机构300相对运动,使得工件安置于左送料机构200以及右送料机构300之间,夹持台110将工件松开,左送料机构200与右送料机构300同步将工件移送至卡盘130外,如此,便可完成该数控机床对工件的全自动加工,此外,通过左送料机构200以及右送料机构300的同步作用,有效提高该全自动数控机床对工件的稳定输送,其次,左送料机构200与右送料机构300移送工件的过程中,该左送料机构200与右送料机构300并未直接接触工件的外侧面,从而避免
该工件外面在转移过程中,发生磨损的情况。
[0029]
左送料机构200包括活动穿过夹持台110的第四移杆211,机壳100的一侧设有用于推动第四移杆211运动的第四气缸210,右送料机构300包括设于工作台140上的第五气缸310,第五气缸310上设有第五移杆311,机壳100内设有用于穿设第四移杆211的固定套120,固定套120靠近夹持台110的一端设有卡盘130,卡盘130安装于夹持台110内,在夹持工件的过程中,第四气缸210将第四移杆211沿着固定套120的轨迹推出,同时,第五气缸310将第五移杆311推出,而此时的工件位于第四移杆211与第五移杆311之间,使得工件安置在第四移杆211与第五移杆311之间,此后,第四气缸210带动第四移杆211缩回,第五气缸310继续将第五移杆311向外推出,并使得第四移杆211与第五移杆311同步将工件移送至夹持台110的卡盘130内。
[0030]
在本实施例中,工件为管状类工件。
[0031]
具体的,卡盘130内设有用于限制工件移动的台阶环131,第四移杆211的一端设有柱体220,第五移杆311的一端设有顶针320,第五移杆311上套设有第一挡环350,当工件位于第四移杆211与第五移杆311之间时,第五气缸310推动第五移杆311以及顶针320运动,直至顶针320插进工件内,并使得第一挡环350与工件的一端留有较小的间隙,与此同时,第四移杆211带动柱体220运动,直至柱体220抵住顶针的一端,具体的,柱体与顶针的接触点可以是在工件内部或者在工件外部,如此,避免左送料机构200与右送料机构300在输送工件的过程中,这两个机构会与工件的外表面直接接触,当工件移动被移动至卡盘130内,且工件的一端抵住台阶环131后,第四气缸210继续带动第四移杆211复位,第五气缸310停止工作,之后,卡盘130将工件夹住,然后,第五气缸310带动第五移杆311复位,当加工完工件后,顶针320插进工件内,柱体220抵住顶针320的一端,并卡盘130松开,之后,柱体220与顶针320同步将工件从卡盘130内输送出来,如此,避免左送料机构200与右送料机构300在输送工件的过程中,这两个机构会与工件的外表面直接接触,从而更好的保护工件的侧面。
[0032]
实施例二
[0033]
如图3所示,本实施例与实施例一的区别点在于,本实施例改变了左送料机构200与右送料机构300的部分结构。
[0034]
在本实施例中,工件为实心的柱体工件。
[0035]
具体的,第四移杆211的一端设有左顶柱230,第五移杆311的一端设有右顶柱330,当工件位于第四移杆211与第五移杆311之间时,第五气缸310推动第五移杆311以及右顶柱330运动,直至右顶柱330抵住工件的一端面,与此同时,第四移杆211带动左顶柱230运动,直至左顶柱230抵住工件的另一端面上,即,使得左顶柱230与右顶柱330将工件夹持在两者之间,如此,避免左送料机构200与右送料机构300在输送工件的过程中,这两个机构会与工件的外表面直接接触,当工件移动被移动至卡盘130内,且工件的一端抵住台阶环131后,第四气缸210继续带动第四移杆211复位,第五气缸310停止工作,之后,卡盘130将工件夹住,然后,第五气缸310带动第五移杆311复位,当加工完工件后,右顶柱330再次抵住工件的一端面,左顶柱230再次抵住工件的另一端面,并卡盘130松开,之后,左顶柱230与右顶柱330同步将工件从卡盘130内输送出来,如此,避免左送料机构200与右送料机构300在输送工件的过程中,这两个机构会与工件的外表面直接接触,从而更好的保护工件的侧面。
[0036]
实施例三
[0037]
如图4所示,本实施例与实施例一的区别点在于,本实施例改变了左送料机构200与右送料机构300的部分结构。
[0038]
在本实施例中,工件为实心的柱体工件或者工件为管状类工件。
[0039]
具体的,第四移杆211的一端沿其中心轴线呈环形阵列设置有多个卡爪240,第五移杆311的一端设有移动块340,移动块340上设有一对长杆341以及一对短杆342,两个长杆341以移动块340的中心对称,两个短杆342以移动块340的中心对称,长杆341与相邻的短杆342之间圆周角为直角。
[0040]
当工件位于第四移杆211与第五移杆311之间时,第四气缸210推动第四移杆211以及多个卡爪240同步运动,直至多个卡爪240套在工件的一端上,与此同时,第五移杆311带动移动块340运动,直至长杆341与对应的卡爪240接触,而此时的短杆342正好套在工件的另一端上,即,使得多个卡爪240、一对短杆342以及一对长杆341将工件夹持在两者之间,其次,如此,左送料机构200与右送料机构300在输送工件的过程中,减少了工件的外表面与这两个送料机构的接触面积,当工件移动被移动至卡盘130内,且工件的一端抵住台阶环131后,第四气缸210继续带动第四移杆211复位,第五气缸310停止工作,之后,卡盘130将工件夹住,然后,第五气缸310带动第五移杆311复位,当加工完工件后,多个卡爪240再次套在工件的一端上,长杆341与对应的卡爪240接触,短杆342再次套在工件的另一端上,并卡盘130松开,之后,多个卡爪240、一对短杆342以及一对长杆341同步将工件从卡盘130内输送出来,如此,避免左送料机构200与右送料机构300在输送工件的过程中,这两个机构会与工件的外表面直接接触,从而更好的保护工件的侧面。
[0041]
多个卡爪240、一对短杆342以及一对长杆341在转移工件的过程中,卡盘130上开设有对应卡爪240以及长杆341的限位孔132,使得卡爪240以及长杆341能够顺利通过对应的限位孔132进入到卡盘130内,以使得该工件能够顺利被带进卡盘130内。
[0042]
本文中所描述的具体实施例仅仅是对本实用新型精神作举例说明。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本实用新型的精神或者超越所附权利要求书所定义的范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 送料机

 热门咨询
热门咨询




tips