
 商标分类
商标分类  商标转让
商标转让 
一种夹紧效果好的点焊机器人的制作方法
 2021-01-29 18:01:25|
2021-01-29 18:01:25| 300|
300| 起点商标网
起点商标网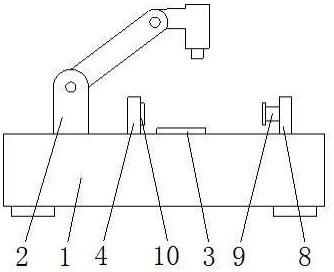
[0001]
本实用新型涉及点焊机器人技术领域,具体为一种夹紧效果好的点焊机器人。
背景技术:
[0002]
点焊机器人由机器人本体、计算机控制系统、示教盒和点焊焊接系统几部分组成,由于为了适应灵活动作的工作要求,通常电焊机器人选用关节式工业机器人的基本设计,一般具有六个自由度,腰转、大臂转、小臂转、腕转、腕摆及腕捻,其驱动方式有液压驱动和电气驱动两种。
[0003]
目前现有的点焊机器人,卡紧效果差,当人们在使用点焊机器人时,无法对焊接件进行卡紧固定,容易造成焊接件出现松动及脱落的现象,影响其焊接质量,不方便人们使用。
技术实现要素:
[0004]
(一)解决的技术问题
[0005]
针对现有技术的不足,本实用新型提供了一种夹紧效果好的点焊机器人,具备卡紧效果好的优点,解决了现有的点焊机器人卡紧效果差的问题。
[0006]
(二)技术方案
[0007]
为实现上述目的,本实用新型提供如下技术方案:一种夹紧效果好的点焊机器人,包括底座,所述底座顶部的左侧固定连接有点焊机器人主体,所述底座顶部的右侧固定连接有放置板,所述底座的顶部且位于放置板的左侧固定连接有第一挡板,所述底座内腔的左侧固定连接有安装板,所述安装板的右侧固定连接有电机,所述电机的输出端固定连接有螺杆,所述螺杆的表面螺纹连接有螺纹块,所述螺纹块的顶部固定连接有第二挡板,所述第二挡板的顶部贯穿至底座的顶部,所述第二挡板左侧的顶部固定连接有固定柱,所述固定柱的左侧与第一挡板的右侧均固定连接有卡板。
[0008]
优选的,所述螺杆的右侧套接有轴承座,所述轴承座的右侧与底座内腔的右侧固定连接。
[0009]
优选的,所述底座内腔正面的两侧和背面的两侧均固定连接有固定块,所述固定块的内侧固定连接有滑杆。
[0010]
优选的,所述滑杆的表面滑动连接有滑套,所述滑套的内侧与螺纹块的正面和背面固定连接。
[0011]
优选的,所述底座内腔的底部滑动连接有滑槽,所述滑槽的内腔滑动连接有滑轮,所述滑轮的顶部与螺纹块的底部固定连接。
[0012]
(三)有益效果
[0013]
与现有技术相比,本实用新型提供了一种夹紧效果好的点焊机器人,具备以下有益效果:
[0014]
1、本实用新型通过设置底座、点焊机器人主体、放置板、第一挡板、安装板、螺杆、
螺纹块、第二挡板、固定柱、卡板、轴承座、固定块、滑杆、滑套、滑槽、滑轮和电机的相互配合,达到了卡紧效果好的优点,解决了现有的点焊机器人卡紧效果差的问题,当人们在使用点焊机器人时,可以对焊接件进行卡紧固定,不会造成焊接件出现松动及脱落的现象,不影响其焊接质量,方便人们使用。
[0015]
2、本实用新型通过设置安装板,对电机在使用时起到了固定稳定的作用,通过设置滑套和滑杆,对螺纹块在使用时起到了移动稳定的作用,通过设置轴承座,对螺杆在使用时起到了转动稳定的作用。
附图说明
[0016]
图1为本实用新型结构示意图;
[0017]
图2为本实用新型底座结构剖面图;
[0018]
图3为本实用新型底座结构俯视图。
[0019]
图中:1、底座;2、点焊机器人主体;3、放置板;4、第一挡板;5、安装板;6、螺杆;7、螺纹块;8、第二挡板;9、固定柱;10、卡板;11、轴承座;12、固定块;13、滑杆;14、滑套;15、滑槽;16、滑轮;17、电机。
具体实施方式
[0020]
为了使本领域技术人员更好地理解本实用新型的技术方案,下面结合附图对本实用新型进行详细描述,本部分的描述仅是示范性和解释性,不应对本实用新型的保护范围有任何的限制作用。
[0021]
应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
[0022]
需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
[0023]
此外,术语“水平”、“竖直”、“悬垂”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
[0024]
在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
[0025]
请参阅图1-3,一种夹紧效果好的点焊机器人,包括底座1,底座1内腔的底部滑动连接有滑槽15,滑槽15的内腔滑动连接有滑轮16,滑轮16的顶部与螺纹块7的底部固定连接,底座1内腔正面的两侧和背面的两侧均固定连接有固定块12,固定块12的内侧固定连接
有滑杆13,滑杆13的表面滑动连接有滑套14,通过设置滑套14和滑杆13,对螺纹块7在使用时起到了移动稳定的作用,滑套14的内侧与螺纹块7的正面和背面固定连接,底座1顶部的左侧固定连接有点焊机器人主体2,底座1顶部的右侧固定连接有放置板3,底座1的顶部且位于放置板3的左侧固定连接有第一挡板4,底座1内腔的左侧固定连接有安装板5,通过设置安装板5,对电机17在使用时起到了固定稳定的作用,安装板5的右侧固定连接有电机17,电机17的输出端固定连接有螺杆6,螺杆6的右侧套接有轴承座11,通过设置轴承座11,对螺杆6在使用时起到了转动稳定的作用,轴承座11的右侧与底座1内腔的右侧固定连接,螺杆6的表面螺纹连接有螺纹块7,螺纹块7的顶部固定连接有第二挡板8,第二挡板8的顶部贯穿至底座1的顶部,第二挡板8左侧的顶部固定连接有固定柱9,固定柱9的左侧与第一挡板4的右侧均固定连接有卡板10,通过设置底座1、点焊机器人主体2、放置板3、第一挡板4、安装板5、螺杆6、螺纹块7、第二挡板8、固定柱9、卡板10、轴承座11、固定块12、滑杆13、滑套14、滑槽15、滑轮16和电机17的相互配合,达到了卡紧效果好的优点,解决了现有的点焊机器人卡紧效果差的问题,当人们在使用点焊机器人时,可以对焊接件进行卡紧固定,不会造成焊接件出现松动及脱落的现象,不影响其焊接质量,方便人们使用。
[0026]
使用时,人们首先将焊接件放置在放置板3上,然后通过外置控制器打开电机17,电机17通过轴承座11带动螺杆6开始转动,螺杆6转动带动螺纹块7开始移动,螺纹块7带动滑轮16在滑槽15内滑动,同时螺纹块7带动滑套14在滑杆13上滑动,同步螺纹块7通过第二挡板8带动固定柱9开始移动,固定柱9通过卡板10和第一挡板4的配合开始对放置板3上的焊接件进行卡紧固定,当人们在使用点焊机器人时,可以对焊接件进行卡紧固定,不会造成焊接件出现松动及脱落的现象,不影响其焊接质量,方便人们使用。
[0027]
本申请文件中使用到的标准零件均可以从市场上购买,本申请文件中所有的部件,根据说明书和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓、铆钉、焊接等常规手段,机械、零件和设备均采用现有技术中常规的型号,该文中出现的电器元件均与外界的主控制器及220v市电电连接,并且主控制器可为电机等起到控制的常规已知设备。
[0028]
需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
[0029]
本文中应用了具体个例对本实用新型的原理及实施方式进行了阐述,以上实例的说明只是用于帮助理解本实用新型的方法及其核心思想。以上仅是本实用新型的优选实施方式,应当指出,由于文字表达的有限性,而客观上存在无限的具体结构,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进、润饰或变化,也可以将上述技术特征以适当的方式进行组合;这些改进润饰、变化或组合,或未经改进将实用新型的构思和技术方案直接应用于其它场合的,均应视为本实用新型的保护范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips