
 商标分类
商标分类  商标转让
商标转让 
一种电池组装系统的制作方法
 2021-01-29 17:01:26|
2021-01-29 17:01:26| 289|
289| 起点商标网
起点商标网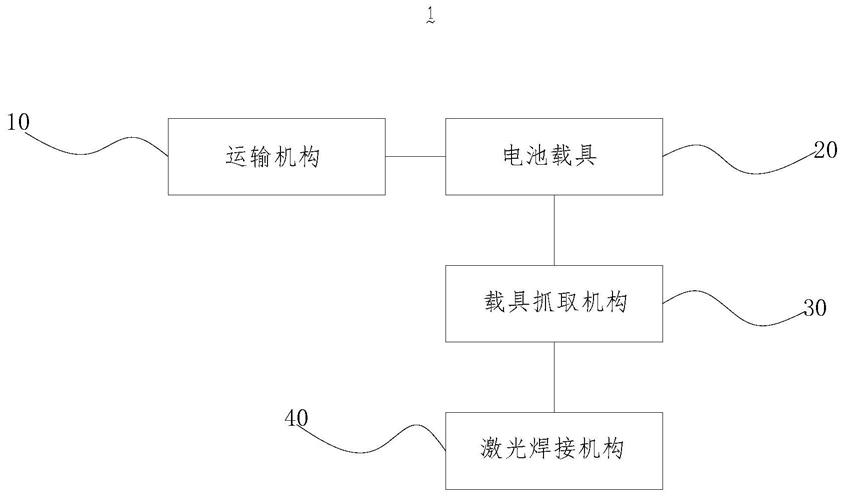
[0001]
本发明涉及电池组装领域,尤其涉及一种电池组装系统。
背景技术:
[0002]
随着现在各种电子设备的增多,电池的使用也越来越广泛,根据使用在不同的产品上,现有的每个电子设备均带有一个电池,而每个设备根据类型、型号的不同,所带有的电池也不相同,而在一些特殊条件下,需要电池能够提供更大的电力来驱动设备工作。所以通常会利用导电的金属材质,将多个小功率电池焊接在一起,以形成大功率、大容量的电池包。
[0003]
现有对生产电池包的设备中,通常都是利用激光焊接设备,将单个电池的正负极利用导电金属材质,合理的焊接在一起,以形成可以输送电源的完整电池包。即,在生产的过程中,需要将多个单电池移动至激光焊接设备的加工工位处。
[0004]
由于多个单电池在进行焊接前,需要提前按照规定的位置摆放好,导致了传统的生产方式中,每次都需要将多个单电池运送至激光焊接设备的加工工位处,并利用人工将其按照规定的位置进行摆放,增加里人工成本,且效率低下。
技术实现要素:
[0005]
有鉴于此,本发明提供一种电池组装系统解决现有电池包组装过程中效率低下的问题。
[0006]
为了达到上述目的,本发明解决技术问题的技术方案是提供一种电池组装系统,包括:运输机构、电池载具、载具抓取机构及激光焊接机构,所述运输机构包括运输支架及运输滚轮,所述运输支架上开设有滚轮槽,所述运输滚轮的数量为多个,多个所述运输滚轮转动连接于所述滚轮槽的内壁上;所述电池载具包括底座、固定板及抓取环,所述底座包括底板、基准座、第一连接板及第二连接板,所述底板位于所述运输支架上,并与所述运输滚轮接触,所述基准座连接于所述底板上,以放置电池,所述第一连接板及所述第二连接板位于所述基准座的相对两侧,皆与所述底板转动连接,且所述第一连接板及所述第二连接板上皆设置卡环,所述卡环分别位于所述第一连接板及所述第二连接板远离所述基准座的一面上;所述固定板位于所述基准座远离所述底座的一侧,其上设有焊接孔及卡扣,所述焊接孔贯穿所述固定板,所述卡扣位于所述固定板的两侧,且所述卡环与所述卡扣卡接;所述抓取环连接于所述底板上;所述载具抓取机构包括抓取组件、垂直传送机构、水平传送机构及抓取支架,所述抓取组件包括基座、第一夹臂、第二夹臂、联动组件、驱动组件及连接架,所述第一夹臂及所述第二夹臂分别位于所述基座的相对两侧,且皆与所述基座滑动连接,所述连接架与所述垂直传送机构连接;所述联动组件包括固定块、联动转杆、第一连杆及第二连杆,所述联动固定块连接于所述基座上,所述联动转杆与所述联动固定块转动连接,且所述联动转杆的两端分别与所述第一连杆及所述第二连杆转动连接;所述第一连杆远离所述联动转杆的一端与所述第一夹臂转动连接,所述第二连杆远离所述联动转杆的一端与所述
第二夹臂转动连接,所述驱动组件固定连接于所述基座上,并驱动所述第一夹臂或所述第二夹臂在所述基座上滑动,以使所述第一夹臂与所述第二夹臂相互靠拢或远离;所述垂直传送机构连接于所述水平传送机构上,所述水平传送机构连接于所述抓取支架上,所述抓取支架远离所述水平传送机构的一端与地面连接;所述激光焊接机构通过所述焊接孔对所述基准座内的电池进行焊接。
[0007]
进一步,所述基座上设置有滑动导轨,所述第一夹臂及所述第二夹臂上皆设置有滑块,所述滑块与所述滑动导轨滑动配合,以实现所述第一夹臂及所述第二夹臂与所述基座的滑动连接。
[0008]
进一步,所述第一夹臂包括第一滑板及第一夹板,所述第一滑板与所述第一夹板的一端连接,所述第二夹臂包括第二滑板及第二夹板,所述第二滑板与所述第二夹板的一端连接;所述滑块分别连接于所述第一滑板靠近所述第一夹板的一面及所述第二滑板靠近所述第二夹板的一面。
[0009]
进一步,所述第一夹板远离所述第一滑板的一端设置有第一折弯部及第一夹持滚筒,所述第二夹板远离所述第二滑板的一端设置有第二折弯部及第二夹持滚筒。
[0010]
进一步,所述第一夹板和/或所述第二夹板上设置有夹紧气缸,以利用所述夹紧气缸与所述第一折弯部和/或所述第二折弯部夹持所述抓取环。
[0011]
进一步,所述驱动组件包括连接块、驱动气缸及传动块,所述连接块将所述驱动气缸连接于所述基座上,所述传动块连接于所述第一滑板或所述第二滑板上,所述驱动气缸的推杆与所述传动块连接,以在通过所述驱动气缸的推杆伸缩,驱动所述传动块带动所述第一夹臂或所述第二夹臂在所述基座上滑动。
[0012]
进一步,所述基准座包括基准板、第一基准侧板及第二基准侧板,所述基准板与所述底板连接,所述第一基准侧板及所述第二基准侧板分别连接于所述基准板相邻的两边上,且位于所述基准板远离所述底板的一面;所述第二连接板位于所述第一基准侧板上,所述第一连接板位于所述基准板远离所述第一基准侧板的一端,以形成具有三侧定位的放置槽。
[0013]
进一步,所述底座还包括定位条,所述定位条与所述底板可拆卸连接,且位于所述基准板远离所述第二基准侧板的一端,以与所述第一连接板、所述第一基准侧板、所述第二基准侧板及所述第二连接板配合,将具有三侧定位的所述放置槽围成具有四侧定位的所述放置槽。
[0014]
进一步,所述抓取环为两个,两个所述抓取环分别连接于所述底板上,且位于所述基准座的相对两侧。
[0015]
进一步,所述第一连接板与所述第二连接板的形状及尺寸相同,且所述卡环位于所述第一连接板及所述第二连接板上的位置相同;所述固定板上设置有延长块,所述延长块位于所述固定板的一端,且其中一个所述卡扣通过所述延长块与所述固定板连接。
[0016]
与现有技术相比,本发明所提供的电池组装系统具有以下有益效果:
[0017]
通过运输机构、电池载具、载具抓取机构及激光焊接机构的配合,在将电池装入电池载具后,放入运输机构连续运输,并利用载具抓取机构逐一将运输机构上的电池载具抓取至激光焊接机构的工位上,实现了自动化完成电池组装的效果,减轻人员工作量,降低成本。
[0018]
以上所述本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明的保护范围内。
附图说明
[0019]
图1为本发明第一实施例提供的一种电池组装系统的模块示意图;
[0020]
图2为图1中运输机构的结构示意图;
[0021]
图3为图1中电池载具的结构示意图;
[0022]
图4为图3中底座的结构示意图;
[0023]
图5为图3中底座的爆炸结构示意图;
[0024]
图6为图3中固定板的结构示意图;
[0025]
图7为图1中载具抓取机构的结构示意图;
[0026]
图8为图7中抓取组件的结构示意图;
[0027]
图9为图8中抓取组件的爆炸结构示意图;
[0028]
图10为图9中基座的结构示意图;
[0029]
图11为图7中第一夹臂的结构示意图;
[0030]
图12为图11中a处的局部放大图;
[0031]
图13为图7中第二夹臂的结果示意图;
[0032]
图14为图13中b处的局部放大图;
[0033]
图15为图7中联动组件的结构示意图;
[0034]
图16为图7中驱动组件的爆炸结构示意图;
[0035]
图17为图7中联动组件的受力原理示意图;
[0036]
附图标记说明:1、电池组装系统;10、运输机构;20、电池载具;30、载具抓取机构;40、激光焊接机构;11、运输支架;12、运输滚轮;111、滚轮槽;21、底座;22、固定板;23、抓取环;24、二维码展示板;211、底板;212、基准座;213、第一连接板;214、第二连接板;215、卡环;216、定位条;2121、基准板;2122、第一基准侧板;2123、第二基准侧板;221、焊接孔;222、卡扣;223、延长块;31、抓取组件;32、垂直传送机构;33、水平传送机构;34、抓取支架;311、基座;312、第一夹臂;313、第二夹臂;314、联动组件;315、驱动组件;316、连接架;317、滑块;318、夹紧气缸;3111、滑动导轨;3121、第一滑板;3122、第一夹板;3123、第一折弯部;3124、第一夹持滚筒;3131、第二滑板;3132、第二夹板;3133、第二折弯部;3134、第二夹持滚筒;3141、联动固定块;3142、联动转杆;3143、第一连杆;3144、第二连杆;3151、连接块;3152、驱动气缸;3153、传动块。
具体实施方式
[0037]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0038]
请参阅图1-17,本发明提供的一种电池组装系统1,用于将单个的电池组装成整个的电池包,其包括运输机构10、电池载具20、载具抓取机构30及激光焊接机构40,其中,电池
载具20的数量为多个,用于装载单个的电池,并放置于运输机构10上进行传送。载具抓取机构30设置于运输机构10的传送路径上,以逐个抓取运输机构10上的电池载具20,并将电池载具20传输至激光焊接机构40的工位上,从而利用激光焊接机构40对电池载具20内的多个电池进行焊接,从而形成整个的电池包。
[0039]
具体的,运输机构10包括运输支架11及运输滚轮12,运输支架11上开设有滚轮槽111,运输滚轮12的数量为多个,多个运输滚轮12转动连接于滚轮槽111的内壁上。
[0040]
电池载具20包括底座21、固定板22及抓取环23,底座21包括底板211、基准座212、第一连接板213及第二连接板214,底板211放置于运输支架11上,与运输滚轮12接触,并可在运输滚轮12的带动下,在运输机构10上移动。基准座212连接于底板211上,用于放置电池,第一连接板213及第二连接板214位于基准座212的相对两侧,且皆与底板211转动连接。第一连接板213及第二连接板214上皆连接有卡环215,且卡环215分别位于第一连接板213及第二连接板远离基准座212的一面上。
[0041]
可以理解,基准座212与底板211的连接方式可以为焊接的固定连接方式,也可以为螺钉、螺柱、卡接等可拆卸连接的方式。
[0042]
固定板22位于基准座212远离底板211的一侧,其上设有焊接孔221及卡扣222,焊接孔221贯穿固定板22,卡扣222位于固定板22的两侧,且卡环215与卡扣222卡接,以利用卡扣222与卡环215的卡接,实现固定板22与基准座212的连接,从而通过固定板22夹持固定位于基准座212内的电池。
[0043]
可以理解,焊接孔221可设置于固定板22上的任意位置,只要能够通过焊接孔221对电池进行焊接等操作即可。在本实施例中,焊接孔221为多个,且等间距的开设于固定板22上。
[0044]
可以理解,第一连接板213及第二连接板214与底板211之间皆通过合页实现转动连接。
[0045]
抓取环23连接于底板211上,通过对抓取环23施力,抓取电池载具20,以将电池载具20运送至指定的工位。
[0046]
载具抓取机构30包括抓取组件31、垂直传送机构32、水平传送机构33及抓取支架34,抓取组件31包括基座311、第一夹臂312、第二夹臂313、联动组件314、驱动组件315及连接架316,第一夹臂312及第二夹臂313分别位于基座311的相对两侧,且皆与基座311滑动连接,连接架316将连接基座311与垂直传送机构32连接,垂直传送机构32连接于水平传送机构33上。
[0047]
联动组件314包括联动固定块3141、联动转杆3142、第一连杆3143及第二连杆3144,联动固定块3141位于第一夹臂312及第二夹臂313之间,且与基座311连接。联动转杆3142与联动固定块3141转动连接,且其两端还分别与第一连杆3143的一端及第二连杆3144的一端转动连接。第一连杆3143远离联动转杆3142的一端与第一夹臂312转动连接,第二连杆3144远离联动转杆3142的一端与第二夹臂313转动连接。驱动组件315固定连接于基座311上,驱动第一夹臂312或第二夹臂313在基座311上滑动,并通过联动组件314进行传动,从而实现实现第一夹臂312与第二夹臂相互靠拢或相互远离。
[0048]
在本实施例中,驱动组件315驱动第二夹臂313在基座311上滑动,当驱动组件315驱动第二夹臂313在基座311上朝靠近联动固定块3141的方向滑动时,第二夹臂313带动第
二连杆3144朝靠近联动转杆3142的方向移动,从而带动联动转杆3142转动。联动转杆3142转动的过程中带动第一连杆3143朝靠近联动转杆3142的方向移动,最终通过第一连杆3143带动第一夹臂312在基座311上朝靠近联动固定块3141的方向滑动,形成第一夹臂312与第二夹臂相互靠拢的运动,以利用第一夹臂312及第二夹臂313相互配合,夹持电池载具20。同理,当驱动组件315驱动第二夹臂313在基座311上朝远离联动固定块3141的方向滑动时,第一夹臂312与第二夹臂313朝相互远离的方向运动。
[0049]
可以理解,驱动组件315可以单独驱动第二夹臂313滑动,也可以单独驱动第一夹臂312滑动,通过联动组件314的传动,只需一个驱动组件315驱动第一夹臂312或第二夹臂313中的一个即可,其省略了一个驱动组件315,达到了使得抓取组件31的结构更加简单、整体尺寸缩小及节约成本的效果。
[0050]
可以理解,驱动组件315可以是气缸、液压缸等可对第一夹臂312或第二夹臂313施力,使其在基座上滑动的机构。
[0051]
可以理解,在本实施例中,垂直传送机构32及水平传送机构33为相互垂直设置的丝杆模组。
[0052]
激光焊接机构40从焊接孔221对基准座212内的电池进行焊接。
[0053]
可以理解,激光焊接机构40可设置任意位置,只要载具抓取机构30能够将电池载具运输至激光焊接机构40的工位上即可。
[0054]
进一步的,基准座212包括基准板2121、第一基准侧板2122及第二基准侧板2123,基准板2121与底板211连接,第一基准侧板2122及第二基准侧板2123分别连接于基准板2121相邻的两边上,且位于基准板2121远离底板211的一面。第二连接板214位于第一基准侧板2122上,第一连接板213位于基准板2121远离第一基准侧板2122的一端,以形成具有三侧定位的放置槽。
[0055]
可以理解,电池从远离第二基准侧板2123的一侧放置于该放置槽内,并分别通过第一基准侧板2122、第二基准侧板2123、第一连接板213及第二连接板214对位于放置槽内的电池进行定位,从而在固定板22与基准板2121夹持电池之前,先将电池在放置槽内的位置定位好,以提高防止电池的效率。
[0056]
进一步的,底座21还包括定位条216,定位条216与底板211可拆卸连接,且位于基准板2121远离第二基准侧板2123的一端,以与第一连接板213、第一基准侧板2122、第二基准侧板2123及第二连接板214配合,将具有三侧定位的放置槽围成具有四侧定位的放置槽。
[0057]
在本实施例中,定位条216与底板211通过螺钉实现可拆卸连接,在部分实施例中,定位条216与底板211也可以通过卡接、插接等方式实现可拆卸连接。
[0058]
进一步的,第一连接板213与第二连接板214的形状及尺寸相同,且卡环215位于第一连接板213及第二连接板214上的位置也相同。
[0059]
进一步的,固定板22上还设置有延长块223,延长块223位于固定板22的一端,且其中一个卡扣222通过延长块223与固定板22连接。
[0060]
可以理解,在第一连接板213与第二连接板214尺寸相同,且卡环215位于第一连接板213及第二连接板214上的位置也相同的情况下,由于第一连接板213直接位于底板211上,而第二连接板214则位于第一基准侧板2122上,即,在第一连接板213与第二连接板214尺寸相同的情况下,第一连接板213及第二连接板214远离基准板2121的一面与基准板2121
的距离不同。为了使卡扣222与卡环215卡接后,固定板22与底板211平行,则需要延长块223将与第一连接板213上的卡环215卡接的卡扣222与固定板22连接,以通过延长块223抵消第一连接板213及第二连接板214远离基准板2121的一面与基准板2121的距离差,从而使得卡扣222与卡环215卡接后,固定板22与底板211平行。
[0061]
进一步的,抓取环23的数量为两个,两个抓取环23分别连接于底板211上,且位于基准座212的相对两侧。
[0062]
进一步的,两个卡扣222/卡环215之间的连线与两个抓取环23之间的连线相互垂直。
[0063]
进一步的,电池载具20还包括二维码展示板24,二维码展示板24连接于底板211上,以对每个电池载具20进行记录,也即对通过扫描二维码,对每个电池载具20内的电池进行记录。
[0064]
进一步的,基座311上设置有滑动导轨3111,第一夹臂312及第二夹臂313上皆设置有滑块317,滑块317与滑动导轨3111滑动配合,以实现第一夹臂312及第二夹臂313与基座311的滑动连接。
[0065]
进一步的,第一夹臂312包括第一滑板3121及第一夹板3122,第一滑板3121与第一夹板3122的一端连接,第二夹臂313包括第二滑板3131及第二夹板3132,第二滑板3131与第二夹板3132的一端连接。滑块317分别连接于第一滑板3121靠近第一夹板3122的一面及第二滑板3131靠近第二夹板3132的一面上,以实现第一滑板3121及第二滑板3131与基座311的滑动连接,也即,实现第一夹臂312及第二夹臂313与基座311的滑动连接。
[0066]
进一步的,第一夹板3122远离第一滑板3121的一端设置有第一折弯部3123,且第一夹板3122靠近第一折弯部3123的一端上设置有第一夹持滚筒3124,第二夹板3132远离第二滑板3131的一端设置有第二折弯部3133,且第二夹板3132靠近第二折弯部3133的一端上设置有第二夹持滚筒3134。在第一夹臂312及第二夹臂313配合夹持电池载具20时,电池载具20的两端分别位于第一折弯部3123与第一夹持滚筒3124之间及第二折弯部3133与第二夹持滚筒3134之间,以利用第一折弯部3123与第一夹持滚筒3124及第二折弯部3133与第二夹持滚筒3134分别夹持电池载具20的两端,也即分别夹持电池载具20的两个抓取环23从而提高第一夹臂312与第二夹臂313配合夹持载具的稳定性。
[0067]
进一步的,第一夹板3122和/或第二夹板3132上设置有夹紧气缸318,以利用夹紧气缸318的推杆与第一折弯部3123和/或第二折弯部3133配合夹持载具,从而增加第一夹臂312与第二夹臂313配合夹取载具时的稳定性。
[0068]
可以理解,在抓取电池载具20时,第一折弯部3123与第一夹持滚筒3124及第二折弯部3133与第二夹持滚筒3134分别卡住电池载具20的两个抓取环23,然后利用夹紧气缸318的推杆与第一折弯部3123和/或第二折弯部3133配合抵触抓取环23,从而利用夹紧气缸318的推力,将抓取环固定住,避免在抓取的过程中,电池载具20发生晃动或掉落。
[0069]
进一步的,联动固定块3141与联动转杆3142的中心位置转动连接,即联动固定块3141相距第一连杆3143的距离与联动固定块3141相距第二连杆3144的距离相等。
[0070]
进一步的,驱动组件315包括连接块3151、驱动气缸3152及传动块3153,连接块3151将驱动气缸3152连接于基座311上,传动块3153连接于第一滑板3121或第二滑板3131上,且驱动气缸3152的推杆与传动块3153连接,以在驱动气缸3152的推杆伸缩时,通过传动
块3153带动第一夹臂312或第二夹臂313在基座311上滑动。
[0071]
本发明的工作原理为:在需要对多个单电池进行焊接,以形成电池包时,先将单电池装入多个电池载具20中,然后将电池载具20放入运输机构10内依次运输至载具抓取机构30处,最后利用载具抓取机构30将多个电池载具20依次抓取至激光焊接机构40的工位处,利用激光焊接机构40从焊接孔221处对电池载具20内的电池进行焊接。
[0072]
与现有技术相比,本发明所提供的电池组装系统具有以下有益效果:
[0073]
通过运输机构、电池载具、载具抓取机构及激光焊接机构的配合,在将电池装入电池载具后,放入运输机构连续运输,并利用载具抓取机构逐一将运输机构上的电池载具抓取至激光焊接机构的工位上,实现了自动化完成电池组装的效果,减轻人员工作量,降低成本。
[0074]
以上所述本发明的具体实施方式,并不构成对本发明保护范围的限定。任何根据本发明的技术构思所做出的各种其他相应的改变与变形,均应包含在本发明的保护范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips