
 商标分类
商标分类  商标转让
商标转让 
用于地板加工的多工装置的制作方法
 2021-01-29 17:01:52|
2021-01-29 17:01:52| 277|
277| 起点商标网
起点商标网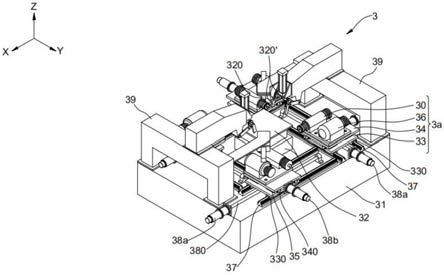
[0001]
本实用新型涉及一种用于地板加工的加工装置,特别是指一种用于地板加工的多功能多工装置。
背景技术:
[0002]
目前,高架地板装置广泛应用在防静电的机房或无尘室中。现有铝合金压铸成型的高架地板经由开模、熔铝、压铸、成型以及修边等主要五道工序。由于在成型过程中,高架地板的端面和底部会有多处毛边,这些瑕疵毛边在安装过程中,一方面会使得高架地板之间无法紧密贴合,也无法与平台框架之间贴合,另一方面也不利于工人安装,且对工人会存在一定的安全隐忧。
[0003]
然而,现有方式中,一般采用人工方式针对成型后的高架地板的四个脚座去除毛边,且需针对成型后的高架地板的四个侧面清除毛边,再针对该高架地板用于镶边之沟槽清除毛边,故工人需将高架地板成批运送至对应之加工处,再进行处理作业,不仅造成生产流程不连续而导致生产效率不高,且每次加工都需耗费大量人力成本。
[0004]
因此,如何克服上述习知技术之种种缺失,实已成为目前业界亟待克服之难题。
技术实现要素:
[0005]
鉴于上述习知技术之缺失,本实用新型提供一种用于地板加工之多工装置,系包括:基台;定位件,系设于该基台上以置放作为目标物之地板,其中,该目标物系具有相对之第一表面与第二表面、邻接该第一与第二表面之侧面及凸出该侧面之凸缘;以及复数多工组件,系以可位移之方式设于该基台上并分别设置于该定位件的侧边,且该多工组件系包含铣刀工具、以可移动方式设于该基台上之支撑结构、及以可移动方式设于该支撑结构上且架设该铣刀工具之架座,其中,该铣刀工具系同轴配置一铣边刀具及铣沟刀具,以令该多工组件相对该定位件位移,使该铣边刀具对该目标物之凸缘进行铣边处理,且同时该铣沟刀具沿该目标物之第一表面上之边缘加工该目标物以形成沟槽。
[0006]
前述之多工装置中,复包括对应该定位件配置之固定部,以借该固定部将该目标物压制于该定位件上。
[0007]
前述之多工装置中,该支撑结构之位移方向与该架座之位移方向系相互垂直,且该架座系以可移动方式设于该支撑结构上,以位移该铣刀工具至所需之位置。
[0008]
前述之多工装置中,该基台上系固定一限位件,且该限位件系为轨道结构,并于该支撑结构之底部固定一用于安装至该轨道结构上之滑座,使该滑座能于该轨道结构上滑动以带动该支撑结构直线位移。
[0009]
前述之多工装置中,复包括固设于该支撑结构上之滚珠螺帽及一接合该滚珠螺帽之滚珠螺杆,借由马达转动该滚珠螺杆以带动该滚珠螺帽作直线运动,致使该支撑结构相对该基台沿该定位件边缘直线位移,使该铣刀工具能沿该目标物边缘直线位移,以进行铣边处理及加工该目标物之沟槽。
[0010]
前述之多工装置中,该支撑结构上配置有轨道,且该架座上配置有至少一配合该轨道之滑块,以令该滑块在该轨道上移动,使该架座相对该支撑结构位移。
[0011]
前述之多工装置中,复包括固设于该架座上之滚珠螺帽及一接合该滚珠螺帽之滚珠螺杆,借由马达转动该滚珠螺杆以带动该滚珠螺帽作直线运动,以令该架座连同该铣刀工具接近或远离该目标物。
[0012]
前述之多工装置中,该架座上复配置有用于作动该铣刀工具之驱动组。
[0013]
前述之多工装置中,该基台上系设置有至少一动力组,且该动力组包含一带动该支撑结构位移之第一马达及一带动该架座位移之第二马达。
[0014]
前述之多工装置中,该铣沟刀具系为锯齿轮片,以马达转动该锯齿轮片,使该锯齿轮片完成加工该目标物上之沟槽。
[0015]
前述之多工装置中,该铣沟刀具位于该铣刀工具之端处。
[0016]
前述之多工装置中,该铣沟刀具之径长小于该铣边刀具之径长。
[0017]
由上可知,本实用新型之用于地板加工之多工装置,主要借由该铣刀工具同轴配置铣边刀具及铣沟刀具,以同步进行凸缘铣边与沟槽铣沟之两道作业,不仅能加快完成高架地板之加工时程,且能缩减整体生产线之加工设备之占用空间体积,同时减少人力付出。
[0018]
上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其他目的、特征和优点能够更明显易懂,以下列举较佳实施例,并配合附图,详细说明如下。
附图说明
[0019]
所包括的附图用来提供对本申请实施例的进一步的理解,其构成了说明书的一部分,用于例示本申请的实施方式,并与文字描述一起来阐释本申请的原理。显而易见地,下面描述中的附图仅仅是本申请的一些实施例,并非用于限定本实用新型的实施方式仅限于此,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图衍生而获得其他的附图。所述附图包括:
[0020]
图1为本实用新型之多工装置配置于加工设备中之前视立体示意图;
[0021]
图1'为本实用新型之多工装置配置于加工设备中之后视立体示意图;
[0022]
图1a为图1之运输装置之立体示意图;
[0023]
图1a'为图1a之标示a'处之局部放大立体示意图;
[0024]
图1b为图1a之另一实施例之前视平面示意图;
[0025]
图1b'为图1b之上视平面示意图;
[0026]
图1c为本实用新型之多工装置欲加工之目标物之上视立体示意图;
[0027]
图1c'为图1c之下视立体示意图;
[0028]
图1c”为图1c之侧视平面示意图;
[0029]
图1d为本实用新型之多工装置于加工过程中之目标物之侧视平面示意图;
[0030]
图1e为本实用新型之多工装置已加工完成之目标物之侧视平面示意图;
[0031]
图1e'为图1e之局部立体示意图;
[0032]
图2a为图1之铣高装置之立体示意图;
[0033]
图2b为图2a之另一实施例之上视平面示意图;
[0034]
图2c为图2b之左视平面示意图;
[0035]
图3a为本实用新型之多工装置之立体示意图;
[0036]
图3a'为图3a之局部放大立体示意图;
[0037]
图3a”为图3a之侧视平面示意图;
[0038]
图3b为图3a之另一实施例之上视平面示意图;
[0039]
图3b'为图3b之侧视平面示意图;
[0040]
图4a为图1之翻转装置及成孔装置之立体分解示意图;
[0041]
图4a'为图4a之另一视角之局部立体示意图;
[0042]
图4b为图4a之另一实施例之侧视平面示意图;
[0043]
图5a为图4a之局部立体示意图;以及
[0044]
图5b为图5a之局部放大示意图。
[0045]
附图标注: 1-加工设备 1'-运输装置 10-取放组件 10a-夹取部 10b
-ꢀ
承载部 10c-动力部 10d-动力源 100-夹持件 101-伸缩结构 11,11'
-ꢀ
支撑组件110-杆架 111-横梁 112-限位件 112a-齿条 2-铣高装置 2a-铣高组件 20-第一铣刀工具 21-第一基台 21a
ꢀ-
导轨与滑座之组合 210-滑块 211-滑轨22-第一定位件 22'-框体 220-固定部 220'-止挡部 23
-ꢀ
第一支撑结构 23a-限位挡板 23b-限位器 24-承载架 24'
ꢀ-
导引结构 240'-滑轨 241'-滑座 25-调整件 250-转杆 251-转盘 25'-减速机 250'-螺杆 251'-螺帽 26-驱动组 27-带动件 27a-滚珠螺杆 27b-螺帽 27c-轴承 270-轴承座 28-动力 280-减速机 3,3'-多工装置 3a
-ꢀ
多工组件 30-第二铣刀工具 300-铣边刀具 301-铣沟刀具 31-第二基台 32-第二定位件 320,320'-固定部 33-第二支撑结构 330-滑座 34-架座 340-滑块 35-轨道36-驱动组 36'
ꢀ-
动力源 360'-杆件 37-限位件 38-动力组 38a-第一马达 38b-第二马达 380-滚珠螺杆 39-支撑架 4-翻转装置 40-轴结构 401-轴杆 41-第三基台 42-第三定位件 42'-固定结构 43-第三支撑结构 430-位移部 44-抵靠结构 45-导轨 47
-ꢀ
带动件 470-齿条 471-齿轮 48,48'
ꢀ-
动力组 480-推拉杆 49-限位开关 5-成孔装置 50-成孔件 51-第四基台 52-第四定位件 520-缓冲件 53-第四支撑结构 54a-固定结构 56-驱动组 56a-马达机电 56b-汽缸机电 57-作动件 9,9'-目标物 9a-第一表面 9b-第二表面 9c-侧面 9d-端面 90-脚座 900-开孔 901-沟槽 91-凸缘 92-导电面砖 r1,r2-径长 a-加工区 b-出料区 d,d-宽度 f1,f2,b1,b2-移动方向 h-高度差 x,y,z,y1-箭头方向
具体实施方式
[0046]
这里所公开的具体结构和功能细节仅仅是代表性的,并且是用于描述本实用新型的示例性实施例的目的。但是本实用新型可以通过许多替换形式来具体实现,并且不应当被解释成仅仅受限于这里所阐述的实施例。
[0047]
在本实用新型的描述中,需要理解的是,术语“中心”、“横向”、“上”、“下”、“左”、“右”、“垂直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或组件必须具有特定的方位、或以特定的方位构造和操作,因此不能理解为对本实用新型的限制。此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要
性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。另外,术语“包括”及其任何变形,皆为“至少包含”的意思。
[0048]
在本实用新型的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸的连接,或一体成型的连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个组件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
[0049]
这里所使用的术语仅仅是为了描述具体实施例而不意图限制示例性实施例。除非上下文明确地另有所指,否则这里所使用的单数形式“一个”、“一项”还意图包括复数。还应当理解的是,这里所使用的术语“包括”和/或“包含”规定所陈述的特征、整数、步骤、操作、单元和/或组件的存在,而不排除存在或添加一个或更多其他特征、整数、步骤、操作、单元、组件和/或其组合。
[0050]
图1及图1'系为一加工设备1之立体示意图。如图1及图1'所示,该加工设备1系包括:一运输装置1'、一铣高装置2、一多工装置3、一翻转装置4以及一成孔装置5。本实用新型系为地板加工之多工装置3,其应用于该加工设备1中,以于该铣高装置2完成铣高后,该多工装置3以同步进行凸缘铣边与沟槽铣沟之两道作业,再以该成孔装置5进行钻孔业,故以下兹分别对该运输装置1'、铣高装置2、多工装置3、翻转装置4及成孔装置5 进行说明。
[0051]
于本实施例中,该加工设备1系将生产线之方向定义为左、右方向(如箭头方向y),且将垂直该生产线之方向定义为前、后方向(如箭头方向x),而将沿该加工设备1之高度方向定义为上、下方向(如箭头方向z)。应可理解地,该方位系用于说明本实施例之配置,并无特别限制。
[0052]
所述之运输装置1'系用于输送(如夹取)目标物9至所需之生产线之加工位置上,故该运输装置1'系配置于该铣高装置2、多工装置3、翻转装置4 及成孔装置5等用以放置该目标物9之上方周围处,以利于将该目标物9置放于该铣高装置2、多工装置3、翻转装置4及/或成孔装置5上。
[0053]
于本实施例中,如图1a所示,该运输装置1'系包含至少一取放组件10 及一以可位移方式架设该取放组件10之支撑组件11,该取放组件10用于取放该目标物9,且该取放组件10配合该支撑组件11位移以移动该目标物9。例如,该支撑组件11系为框架结构,其具有两组立设于基础表面(如地板上)相对两侧之门型杆架110及跨设于该些杆架110间的横梁111,且该横梁111位于该铣高装置2、多工装置3与翻转装置4的上方处以作为该取放组件10位移之路径。较佳地,如图1b及图1b'所示之支撑组件11',该横梁 111上可配置一用以导引该取放组件10位移之限位件112,如直线轨道结构,其配置有至少一齿条112a(如图1a'所示)及啮合该齿条112a且轴接该取放组件10之齿轮(图略),以借由一动力部10c(如马达或驱动电机)转动该齿轮而使该齿轮沿该齿条112a滚动以直线位移该取放组件10,使该取放组件10借由该限位件112能稳定直线位移于两杆架110之间。应可理解地,有关该支撑组件11,11'之种类繁多,并无特别限制。
[0054]
再者,该取放组件10系包含一具有夹持件100之夹取部10a及一用以架设该夹取部10a之承载部10b。例如,该夹取部10a之夹持件100可依需求调整宽度d以夹取不同宽度的目
标物9,其中,可使用油压缸或气压缸(其作为动力源10d)控制两个之夹持件100之距离,以夹紧或放松目标物9,且该承载部10b系为移动机架,其以垂直该横梁111之方式架设于该横梁111 (或该限位件112)上,并枢接一齿轮(未图示),其中,该齿轮(未图示) 啮合于一齿条112a(如图1a'所示),以令该齿轮借由一动力部10c(如第1b 图所示)驱动以在该齿条112a上作直线运动,使得该取放组件10可在一滑座 (如该承载部10b)与滑轨组件(如该限位件112及其上之齿条112a与齿轮) 上朝箭头方向y作直线来回运动。具体地,该夹取部10a借由复数动力源 10d(如图1a所示之气压或油压汽缸)带动该些夹持件100外伸或内缩(朝箭头方向y),以产生张开或夹住动作,且于该承载部10b底部系配置一连接该夹取部10a之伸缩结构101,以升降该夹取部10a。较佳地,如图1b所示,该承载部10b上方可配置该用以带动该承载部10b位移之动力部10c,且该动力部10c可为一马达,以驱动该齿轮在该齿条112a上作直线运动。
[0055]
又,该取放组件10之数量可依需求设定。例如,于对应该铣高装置2、多工装置3与翻转装置4之加工处之间分别配置该取放组件10,故至少设置两组取放组件10。具体地,各该取放组件10分别设于该铣高装置2与该多工装置3之间、及该多工装置3与该翻转装置4之间,且可依需求将该取放组件10增设于该杆架110与该铣高装置2之间(如图1b所示之虚线),使该些取放组件10作为该目标物9之中间转运组件,以借由不断取放该目标物9至各加工处,俾完成整个生产线之加工处理流程。
[0056]
另外,该目标物9系为高架地板,如图1c、图1c'及图1c”所示,其具有相对之第一表面9a(如地板面)与第二表面9b(如底侧端部)及邻接该第一与第二表面9a,9b之侧面9c。例如,该目标物9系大致呈矩形体(如正方形板),该目标物9底部(如该第二表面9b之侧,其为高架地板底部)系为蜂巢状,并于该目标物9之第二表面9b之四个角落上形成有脚座90,以于该四个脚座90设置开孔900(如图1e所示),以供使用螺丝分别将四个脚座90固定于该高架地板用之支撑脚架上。具体地,该脚座90之端面9d 系微凸出(如图1c”所示之高度差h)该目标物9之第二表面9b,且于该第一表面9a之边缘系形成有凸出该侧面9c之凸缘91,该凸缘91即为该多工装置3需加工高架地板之四个边缘,并于该第一表面9a上沿该高架地板之四个边缘加工出四个沟槽901(如图1d或图1e'所示),该图1c、图1c'及图 1c”尚未设置四个沟槽901。该第一表面9a(如地板面)设置有一导电面砖 92(如图1d或图1e'所示),镶边条设于该四个沟槽901内后大致与该导电面砖92成同一平面。本实施例之目标物9系为高架地板,故以下将该目标物9 称为高架地板。
[0057]
所述之铣高装置2系设于整个生产线之加工处理流程之最前期,其配合该运输装置1'作动,以用于加工该脚座90之端面9d,例如,清除该高架地板之四个脚座90之端面9d毛边,以加工处理该高架地板所需的高度尺寸。
[0058]
于本实施例中,如图2a所示,该铣高装置2系包含至少一铣高组件2a、一用以配置该铣高组件2a之第一基台21及平行设于该第一基台21中心处之第一定位件22,使该铣高组件2a对应该第一定位件22并相对该第一定位件22升降,以调整对该目标物9(高架地板)之铣高加工量,该铣高加工量设定完成后,再进行水平移动以对该目标物9之脚座90加工,并于完成该目标物9之铣高处理后,令该取放组件10将该目标物9从该第一定位件22 上移开。例如,该第一定位件22系为框架体(如图2a所示之平行架或如图 2b所示之正方形框体22'),且该铣高组件2a系配置于该第一定位件22之相对两侧(如前、后侧),该第一定位件22
之相对两侧之外侧可依需求配置至少一固定部220(如转角缸夹具)。于使用时,本实施例之固定部220使用转角缸夹具,将该高架地板固定于该第一基台21上,并分别于该些第一定位件22之其中一侧各设置至少一个转角缸夹具,以于进行铣除作业之过程中,限制该高架地板位移而避免偏离该第一定位件22;进一步,可于该第一定位件22之外侧及垂直于该第一定位件22设置该转角缸夹具之侧之另一侧配置至少一止挡部220',该止挡部220'挡住该高架地板之侧面9c,以利于作业员将目标物9置放(如朝箭头方向y1)于该第一定位件22上。应可理解地,亦可令该取放组件10从进料处(其位于左侧杆架110旁,图略)夹取需加工处理的目标物9并将其放置于该第一定位件22上之加工位置。
[0059]
再者,各该铣高组件2a系包含复数个第一铣刀工具20、以可位移方式设于该第一基台21上之复数个第一支撑结构23、及分别设于该第一支撑结构23两侧上并架设该些第一铣刀工具20之承载架24,其中,本实施例共设置两个独立之第一支撑结构23及四个独立之该承载架24,且一个独立之第一支撑结构23及两个独立之该承载架24系作为一机组(本实施系显示两机组),以令该两机组分别平行设置于该第一定位件22之相对两侧,且单一机组中之两个独立之该承载架24分别固定于一个独立之第一支撑结构23之相对两侧上,使得该承载架24上之复数第一铣刀工具20可同时由同一个动力组28驱动,以快速加工该目标物9之脚座90至所需的高度。例如,该承载架24系呈l形架体,其相对两端侧上分别配置一驱动组26(如图2a或图 2b所示)及该第一铣刀工具20,以借由该驱动组26作动该第一铣刀工具20。具体地,该驱动组26系为马达,其作动该第一铣刀工具20转动以加工该目标物9之脚座90至所需的高度。
[0060]
又,较佳地,该第一支撑结构23系为座体,其上配置有一如转杆250 与转盘251组合之调整件25,该调整件25系包含一转杆250及一转动该转盘251,如图2a或图2b所示,以借由手动该转杆250转动该转盘251,令该调整件25转动一减速机25',该减速机25'再带动一螺杆250'转动,该螺杆 250'再驱动一螺帽251'进行上、下运动,因该螺帽251'固定于该承载架24上,使得该螺杆250'可驱动该承载架24升降(如箭头方向z),并使该第一铣刀工具20位移至所需之高度位置。例如,该承载架24可借由一导引结构24' 位移,该导引结构24'包含滑轨240'与滑座241',其中,该滑轨240'分别固定于该第一支撑结构23上之相对两侧之表面上,该滑座241'分别固定于该承载架24上,使得该转杆250转动该转盘251时,可分别各自带动该承载架 24上之第一铣刀工具20在该滑轨240'上沿上、下方向(如箭头方向z)直线移动,并依该调整件25上之数值仪表上之刻度尺调整该第一铣刀工具20 至欲加工该脚座90所需的高度。具体地,该调整件25之转盘251上可配置一数值仪表(图未示),以明确控制该承载架24之高度位置,使该第一铣刀工具20能铣出该目标物9之四个脚座90所需之高度,如从铣前高架地板之高度56
㎜
至铣后55
㎜
。
[0061]
另外,该第一基台21上可依需求设置一带动该第一支撑结构23位移之带动件27及一作动该带动件27之动力组28。例如,该动力组28系为马达,其借由一减速机280固设于该第一基台21之侧面上,且该带动件27系包含一滚珠螺杆27a、轴承27c(如图2b所示)及螺帽27b,其中,该轴承27c 系设置于一轴承座270上,并将该螺帽27b固定在该第一支撑结构23之底部,当该动力组28驱动一减速机280转动该滚珠螺杆27a时,使得该滚珠螺杆27a旋转时可带动该螺帽27b上之第一支撑结构23作直线往复运动一定距离,其中,该距离大于或等于脚座90之宽度d(如图1c”所示),致使该滚珠螺杆27a带动该第一支撑结构23靠近或远离该
第一定位件22,且可于该第一支撑结构23侧面上设置至少一限位挡板23a,并于该第一基台21 上设置至少一限位器23b,以借由该限位挡板23a接触该限位器23b之位置而控制该第一铣刀工具20之加工行程。具体地,如图2c所示,一导轨与滑座之组合21a系于该第一支撑结构23底部配置复数滑块210以作为滑座,且于该第一基台21上配置复数对应接合该滑块210之滑轨211以作为导轨,本实施例之滑块210与滑轨211共分别设置两个,使该滑块210沿该滑轨211 直线移动,令该带动件27可同时带动该第一支撑结构23及其上之两个承载架24与固定于该些承载架24上之该两个驱动组26与该两个第一铣刀工具 20一并相对该第一基台21位移一定距离(大于或等于脚座90之宽度d),以加工四个脚座90之端面9d,达成该高架地板所需之高度。
[0062]
所述之多工装置3系配合该运输装置1'作动以用于加工该目标物9之凸缘91(例如,加工该高架地板之四周侧边的端面,以加工处理该高架地板所需的四个宽度,例如600*600mm)及加工该目标物9之沟槽901,以达成用以配置该高架地板所用之镶边条之沟槽901。具体地,借由人机操控界面以可程序逻辑控制器(programmable logic controller,简称plc)方式输入加工数值,以控制欲加工处理该高架地板的四个边缘之宽度尺寸及该高架地板的四个沟槽901尺寸。
[0063]
于本实施例中,如图3a、图3a'、图3a”、图3b及图3b'所示,该多工装置3系包含至少一多工组件3a、一用以配置该多工组件3a之第二基台31、及设于该第二基台31中心处之第二定位件32,以令该取放组件10将该目标物9置放于该第二定位件32上,使该多工组件3a相对该第二定位件32位移以进行该目标物9之铣边处理。例如,该第二定位件32系为一正方形之置放平台,该高架地板放置于该置放平台上,以令该多工组件3a分别设置于该第二定位件32的四个侧边(共四组多工组件3a),且该置放平台外侧可依需求配置复数固定部320,320',以限制该目标物9位移而避免偏位。具体地,于该第二基台31之前、后两侧上分别设置支撑架39,以于该支撑架39 上架设该固定部320,故当该目标物9置放于该置放平台上后,借由该些固定部320对角压紧夹固该目标物9之脚座90,以防止该目标物9于铣边过程中发生偏位,且该固定部320'亦可配置于该置放平台之上方,以借由一动力源36'(如图3b'所示之油压或气压汽缸)之杆件360'进行伸缩动作而下压或上拉该些固定部320'时,该些固定部320'会压制或分离该目标物9之第二表面9b。
[0064]
再者,各该多工组件3a系包含一第二铣刀工具30、一设于该第二基台 31上之第二支撑结构33、及一设于该第二支撑结构33上以架设该第二铣刀工具30之架座34,且该架座34系以可移动方式设于该第二支撑结构33上,以位移该第二铣刀工具30至所需之位置。例如,采用导轨与滑座之组合,于该第二支撑结构33上侧配置有一轨道35,以令该架座34下方之滑块340 配合该轨道35,使该第二铣刀工具30直线短距离位移至所需之加工位置。具体地,该架座34配置一驱动组36及该第二铣刀工具30,且该第二铣刀工具30系同轴配置一如轮盘之铣边刀具300及如锯齿轮片之铣沟刀具301,以借由该驱动组36作动该铣边刀具300及铣沟刀具301转动,使该铣边刀具 300于目标位置处(如贴合该目标物9之侧面9c之凸缘91)加工该目标物9 之凸缘91之端面,以加工处理该高架地板所需的四个宽度,且使该铣沟刀具301于目标位置处(如贴合该目标物9之第一表面9a上沿该高架地板之四个边缘)同时完成加工该目标物9之四个沟槽901。该驱动组36例如为一马达,该马达之马力大于仅需铣边用之马达之马力。较佳地,该铣沟刀具301 位于该第二铣刀工具30之端处,且该铣沟刀具
301之径长(直径)r1小于该铣边刀具300之径长(直径)r2,以位于该目标物9之第一表面9a之侧,并借由调整该铣沟刀具301之高度位置(于箭头方向z上之位置),以控制该沟槽901之深度。
[0065]
又,该第二支撑结构33系为板座体,其以可位移之方式配置于该第二基台31上。例如,该第二基台31上复设有一限制该第二支撑结构33位移方向之限位件37及一带动该第二支撑结构33与该架座34位移之动力组38,如第3b图所示。具体地,采用导轨与滑座之组合,该限位件37系为双轨道结构,该双轨道结构系固定于第二基台31上,该第二支撑结构33之底部固定一滑座330,并于该第二支撑结构33之底部固定一滚珠螺帽(图略)与一接合该滚珠螺帽之滚珠螺杆380,该动力组38系包含一第一马达38a,以令该第一马达38a带动该滚珠螺杆380转动并驱动该滚珠螺帽作直线运动,使得该第二支撑结构33相对该第二基台31沿该第二定位件32边缘直线长距离位移,使该第二铣刀工具30能沿该目标物9之侧面9c直线长距离位移,以加工该目标物9之凸缘91及形成该沟槽901。
[0066]
另外,该动力组38复包含一第二马达38b,且该第二支撑结构33上固定有一轨道35,该架座34底部固定一滑块340,该滑块340在该轨道35上移动,使该第二马达38b带动该架座34相对该第二支撑结构33直线位移,因而该第二铣刀工具30能直线位移至所需之平面位置,以接近或远离该第二定位件32。例如,基于该第二定位件32之其中一侧边,第二支撑结构33 之位移方向(如图3b所示之移动方向f2,b2)与架座34之位移方向(如图 3b所示之移动方向f1,b1)系相互垂直。具体地,该架座34下侧固定一滚珠螺帽(图略)与接合该滚珠螺帽之滚珠螺杆(图略),以令该第二马达38b 转动该滚珠螺杆,因滚珠螺杆仅原地旋转未移动,故该滚珠螺杆致动该滚珠螺帽产生直线位移,以令该滚珠螺帽直线驱动该架座34沿该轨道35位移,使该第二铣刀工具30直线位移至所需之加工位置。
[0067]
所述之翻转装置4系配合该运输装置1'作动以用于针对该目标物9之第一表面9a或第二表面9b进行翻转,例如,将清除毛边后及形成该沟槽901 的高架地板翻转而使其第一表面9a朝上。
[0068]
于本实施例中,如图4a或图4b所示,该翻转装置4系包含一第三基台41、一设于该第三基台41上之轴结构40、一设于该第三基台41上之第三定位件42、及一以可位移方式设于该第三基台41上之第三支撑结构43,且该第三定位件42之其中一端侧系枢接一设于该第三基台41上之轴结构40 以相对该第三基台41进行翻转,使该第三定位件42受力翻转而位于该第三支撑结构43上方,以于该取放组件10将该目标物9置放于该第三定位件42 上后,该第三定位件42将该目标物9转承至该第三支撑结构43上。
[0069]
再者,该第三定位件42之前、后侧可依需求配置至少一固定结构42',以限制该目标物9位移而避免偏离该第三定位件42,且该第三基台41上可依需求配置一抵靠结构44,以顶置该第三定位件42之另一端侧。具体地,借由一油压汽缸(图略)推拉该固定结构42',使该固定结构42'接合或分离该第三定位件42,且该固定结构42'抵靠或分离该目标物9。
[0070]
又,该第三支撑结构43系为送料板,且该第三基台41上于对应该第三支撑结构43处设置一组导轨45,以令该第三支撑结构43可沿该导轨45移动于该第三定位件42与该成孔装置5之间。例如,该第三支撑结构43底侧配置有复数位移部430(如滑块),以借由该些位移部430接合该导轨45,使该第三支撑结构43能沿该导轨45直线移动,令该第三支撑结构43靠近或远离该第三定位件42。具体地,借由一油压汽缸(图略)拉动该第三支撑结构43,使该第
三支撑结构43沿该导轨45直线移动。
[0071]
另外,该第三定位件42系为翻转板,且该第三基台41上系于前侧或后侧处设置一带动件47(如图4a所示),以带动该第三定位件42进行翻转动作。例如,该带动件47系包含一齿轮471与一齿条470(如图4a'所示),其齿条470啮合其齿轮471,且该齿轮471轴接该轴结构40之轴杆401,以当该齿条470直线移动时,会带动该齿轮471转动,使该齿轮471转动该轴杆401,以翻转该第三定位件42而位于该第三支撑结构43上方。具体地,借由一动力组48(如气压或油压汽缸)之推拉杆480带动该齿条470直线进退,以转动该齿轮471。较佳地,可于该第三基台41上配置至少一限位开关 49,以控制该推拉杆480之伸缩距离,使该齿条470带动该齿轮471之旋转幅度,以稳定翻转该第三定位件42。
[0072]
所述之成孔装置5系配合该翻转装置4作动以用于形成至少一开孔900 (如图1e所示之沉头孔)于该目标物9之第一表面9a上,例如,在高架地板的脚座90处进行钻孔以形成该高架地板的定位孔。
[0073]
于本实施例中,该翻转装置4与该成孔装置5系设于同一加工位置,故该翻转装置4与该成孔装置5系配合同一组运输装置1'之运作,且如图4a 及图5a所示,该成孔装置5系包含一邻接该第三基台41之第四基台51、至少一设于该第四基台51上之第四定位件52、一设于该第四基台51上之第四支撑结构53、及至少一设于该第四支撑结构53上之成孔件50,且借由设置油压或气压组件(如另一动力组48'),以令该第三支撑结构43相对该第三基台41位移而将该目标物9输送至该第四基台51上,使该成孔件50于该目标物9上形成开孔900。例如,该第四基台51与第三基台41可为共平面配置,且该第四基台51系定义出一加工区a及一出料区b,以令该第四定位件52设于该加工区a边缘以定位该目标物9,且令该第四支撑结构53 罩盖于该加工区a上方,使该成孔件50位于该加工区a上方,并使该导轨 45延伸至该第四基台51之加工区a中。具体地,该第三支撑结构43沿该导轨45将高架地板运送至该加工区a后,该第四定位件52限位该目标物9,以有利该目标物9定位于第四基台51上。
[0074]
再者,该第四定位件52系对应该第四基台51之边缘配置,以限制该目标物9位移,致使该目标物9不会于该加工区a中发生偏转。具体地,依据该送料(该第三基台41至该加工区a)或该导轨45之路径方向,该第四定位件52系配置于该送料路径之终点处,如该加工区a之后侧及右侧,以达到限制该送料板位移之目的。例如,该第四定位件52于顶端配置有缓冲件 520(如转轮、轴承或其它等),以顺向滑移式接触该目标物9,使该送料板及其上之目标物9进入该加工区a时不会强力卡制,以减缓摩擦力。
[0075]
又,该第四支撑结构53系为框架体,其对应该加工区a之范围而罩盖于该加工区a之上方,其上可依需求配置至少一驱动组56,以作动该成孔件50(如图5a所示)。例如,该驱动组56系配置有马达机电56a及汽缸机电56b,以驱动该成孔件50同时垂直升降及转动,借以针对高架地板之脚座 90处进行钻孔而形成沉头孔,且该成孔件50系为台阶钻形式(如图5b所示),其布设于该第四支撑结构53之角落。具体地,该驱动组56与该成孔件50系构成一机组,如空油压自动钻孔机,其借由马达机电56a转动该成孔件50,且借由油压或气压汽缸机电56b升降该成孔件50。应可理解地,有关该第四支撑结构53之构造及该驱动组56与该成孔件50之配置均可依需求设计,如第4b图所示之第四支撑结构53',并无特别限制。
[0076]
另外,可借由固定结构54a接触抵制该目标物9。例如,该固定结构54a 系如物理性压头或真空吸附头,以配置于该第四支撑结构53下侧,且可借由设置油压或气压组件(图
略)以驱动该固定结构54a压制该目标物9。较佳地,于该加工区a处系对应该出料区b之方向配置一前端如耙状之作动件57,其为伸缩结构,使用油压或气压组件(图略)以推动该加工区a中之目标物9之侧面9c,使该目标物9于该加工区a完成加工后会受力而位移至该出料区b。
[0077]
当于生产线上使用该加工设备1时,借由该运输装置1'之其中一取放组件10将单一目标物9运送至该铣高装置2中,以令该铣高装置2对该目标物9之四个脚座90进行铣高作业(即铣削毛边)。待完成铣高作业完成后,借由该运输装置1'之另一取放组件10将该目标物9从该铣高装置2运送至该多工装置3以同步进行铣边及铣沟作业,使该多工装置3对该目标物9的四个侧面9c上之凸缘91铣削毛边及对该目标物9的第一表面9a上沿该高架地板之四个边缘加工该目标物9而形成四个沟槽901。
[0078]
于本实施例中,借由该多工装置3之多工组件3a之循环式位移(如第 3b图所示之移动方向f1,f2,b1,b2)设计,以避免该铣边刀具300重复铣除同一侧面9c上之凸缘91,因而能避免该目标物9之侧面9c上之凸缘91过度铣除而损坏或该铣边刀具300发出机械噪音。同理地,可避免该铣沟刀具301 重复铣除同一沟槽901,因而能避免该目标物9之沟槽901过度铣除而损坏或该铣沟刀具301发出机械噪音。
[0079]
由于前期铣削作业系针对高架地板的底部(该目标物9之第二表面9b) 及高架地板的顶面(该目标物9之第一表面9a)的沟槽901进行制作(如图 1d所示之目标物9),而后期钻孔作业需于高架地板的顶面(该目标物9之第一表面9a)进行加工处理,故于进行钻孔作业前,需先将高架地板翻面。因此,借由该运输装置1'之另一取放组件10将该目标物9从该多工装置3 运送至翻转装置4之第三定位件42上,再借由带动件47转动该轴结构40,以令该第三定位件42沿该轴结构40翻转,使该目标物9翻转180度后而置放在该第三支撑结构43上,之后,借由该导轨45将第三支撑结构43滑移至该成孔装置5之加工区a中。
[0080]
最后,借由该成孔装置5进行该目标物9之脚座90处所需之沉头孔之钻孔作业(如图1e及图1e'所示之开孔900),且待结束该钻孔动作后,再借由该作动件57将该完成加工处理之目标物9'(如图1e及图1e'所示)推送至该出料区b,以完成整个高架地板的加工处理流程。
[0081]
综上所述,本实用新型之用于地板加工之多工装置3,主要借由该第二铣刀工具30同轴配置铣边刀具300及铣沟刀具301,以同步进行凸缘91铣边与沟槽901铣沟之两道作业,不仅能加快完成高架地板之加工时程,且能缩减整体生产线之加工设备1之占用空间体积,同时减少人力付出。
[0082]
以上所述,仅是本实用新型的较佳实施例而已,并非对本实用新型作任何形式上的限制,虽然本实用新型已以较佳实施例揭露如上,然而并非用以限定本实用新型,任何熟悉本专业的技术人员,在不脱离本实用新型技术方案范围内,当可利用上述揭示的方法及技术内容作出些许的更动或修饰为等同变化的等效实施例,但凡是未脱离本实用新型技术方案的内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips