
 商标分类
商标分类  商标转让
商标转让 
动车组过线孔智能打孔机的制作方法
 2021-01-29 15:01:44|
2021-01-29 15:01:44| 284|
284| 起点商标网
起点商标网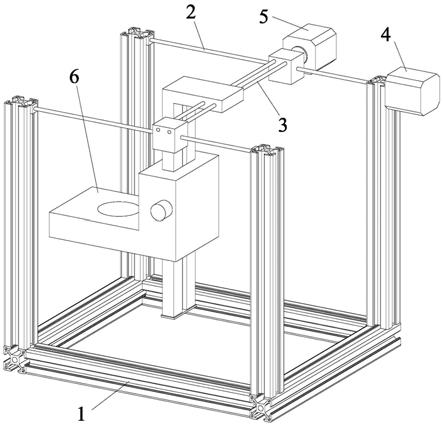
[0001]
本发明涉及动车组线缆检修技术领域,具体涉及一种动车组过线孔智能打孔机。
背景技术:
[0002]
动车组有成千上万根不同线径的线缆,为各个系统的设备供电或者传输信号,动车组运行一段时间后不可避免地会出现线缆老化、破损等情况;为了保证动车组的行车安全,在动车组检修过程中,需要按照线束检修的标准对损坏的线缆进行判定,修复或者更换。
[0003]
动车组内线束按照走线路径基本分为车厢内、车厢内到车下、车顶到车厢内等几种,车厢内及车顶到车厢内走线往往比较容易更换,车厢内到车下走线经过地板过线孔(过线孔为车厢内线缆到车下经过的孔位),为了保证车厢的气密性,用胶将线缆束与过线孔密封。由于过线孔此种结构的限制,换线不易操作,需要在过线孔处打孔,将线缆从车上布置到车下,留好一端余量后重新打胶密封。
[0004]
由于过线孔处线缆较多,分布无明显规律,线缆在密封胶内部分布无规律,导致在密封胶上开孔时损伤线缆的风险非常大,并且过线孔处线缆繁多,若开孔过程中将某根或某几根线缆损坏,很难识别出该线缆的起始位置和物料信息,最后需要将整个过线孔破坏,逐根确定该过线孔处线缆的位置和走线路径,大大的增加检修工作量,增加检修成本,延误检修周期,消耗了大量的人力物力。
[0005]
同时,在动车组检修换线过程中,现有的过线孔打孔方法为人工肉眼判断过线孔胶体内线缆的分布,要车上与车下各分布一人结合判断打孔位置,判断结果存在很大的误差,开孔伤线的风险增大。
技术实现要素:
[0006]
为了解决现有过线孔打孔方法存在的需要车上和车下各分布一人结合判断打孔位置,且用肉眼无法精准判断过线孔无线缆区域,导致开孔伤线的风险增大,增加检修成本,延误检修周期,消耗大量人力物力的技术问题,本发明提供一种动车组过线孔智能打孔机。
[0007]
本发明解决技术问题所采取的技术方案如下:
[0008]
动车组过线孔智能打孔机,其包括支撑框架、横向丝杠机构、纵向丝杠机构、横向步进电机、纵向步进电机、高度可调吊座、电钻、金属探测器和控制系统;横向丝杠机构和横向步进电机均沿支撑框架的横向固定在支撑框架上,横向步进电机根据控制系统发出的指令驱动横向丝杠机构转动,进而驱动高度可调吊座沿支撑框架的横向移动;纵向丝杠机构和纵向步进电机均沿支撑框架的纵向固定在支撑框架上,纵向步进电机根据控制系统发出的指令驱动纵向丝杠机构转动,进而驱动高度可调吊座沿支撑框架的纵向移动;电钻、金属探测器和控制系统均固连在驱动高度可调吊座上,金属探测器用于探测过线孔位置下方是否有线缆,并将探测结果传送给控制系统,控制系统根据接收的探测结果控制电钻对过线
孔下方无线缆区域的过线孔位置进行打孔。
[0009]
本发明的有益效果是:利用本发明的智能打孔机,可以做到探测精准无误差,做到零风险换线,并且钻孔操作为机械化,避免了根据肉眼判断钻孔位置的不确定性,具有可重复性,操作方便快捷,可大大提高工作效率,缩减生产周期,节省资金,避免不必要的人力物力的浪费。
附图说明
[0010]
图1是本发明动车组过线孔智能打孔机的结构示意图。
[0011]
图2是本发明中的支撑框架的结构示意图。
[0012]
图3是本发明中的横向丝杠机构、纵向丝杠机构、横向步进电机、纵向步进电机、高度可调吊座装配后的结构示意图。
[0013]
图4是本发明中的高度可调吊座和纵向丝母的结构示意图。
具体实施方式
[0014]
下面结合附图和实施例对本发明做进一步详细说明。
[0015]
如图1至图4所示,本发明的动车组过线孔智能打孔机包括:支撑框架1、横向丝杠机构2、纵向丝杠机构3、横向步进电机4、纵向步进电机5、高度可调吊座6、电钻、金属探测器和控制系统;支撑框架1是由铝型材拼接成的矩形框架,既满足强度要求,又减轻重量,方便携带和使用。横向丝杠机构2和横向步进电机4均沿支撑框架1的横向固定在支撑框架1上,横向步进电机4根据控制系统发出的指令驱动横向丝杠机构2转动,进而驱动高度可调吊座6沿支撑框架1的横向移动;纵向丝杠机构3和纵向步进电机5均沿支撑框架1的纵向固定在支撑框架1上,纵向步进电机5根据控制系统发出的指令驱动纵向丝杠机构3转动,进而驱动高度可调吊座6沿支撑框架1的纵向移动;电钻、金属探测器和控制系统均固连在驱动高度可调吊座6上,金属探测器用于探测过线孔位置下方是否有线缆,并将探测结果传送给控制系统,控制系统根据接收的探测结果控制电钻对过线孔下方无线缆区域的过线孔位置进行打孔。
[0016]
上述横向丝杠机构2包括横向光杆2-1、横向滑块2-2、横向丝杆2-3和横向丝母2-4,横向光杆2-1和横向丝杆2-3平行设置,横向光杆2-1的两端沿支撑框架1的横向固定在支撑框架1上,横向滑块2-2套在横向光杆2-1上且与其滑动连接;横向丝杆2-3的两端通过轴承沿支撑框架1的横向转动连接在支撑框架1上,且横向丝杆2-3的一个端部与横向步进电机4的转轴同轴固连;横向丝母2-4与横向丝杆2-3螺纹连接。
[0017]
上述纵向丝杠机构3包括纵向光杆3-1、纵向丝杆3-2和纵向丝母3-3,纵向光杆3-1和纵向丝杆3-2平行设置,纵向光杆3-1的两端沿支撑框架1的纵向固定在横向滑块2-2和横向丝母2-4上,纵向丝杆3-2的两端通过轴承沿支撑框架1的纵向转动连接在横向滑块2-2和横向丝母2-4上,且纵向丝杆3-2的一个端部与纵向步进电机5的转轴同轴固连;纵向丝母3-3的一侧与纵向丝杆3-2螺纹连接,另一侧与纵向光杆3-1滑动连接。
[0018]
上述高度可调吊座6包括吊座6-1、l形连接座6-2和带齿轮步进电机6-3,吊座6-1的顶部与纵向丝杠机构3的纵向丝母3-3固连,吊座6-1沿垂向设有长槽6-1-1,长槽6-1-1内设有平行于长槽方向的齿条;l形连接座6-2的竖直段套在吊座6-1上,带齿轮步进电机6-3
的壳体固连在l形连接座6-2的竖直段上且电机转轴前端固连的齿轮与长槽6-1-1内的齿条啮合,电钻和金属探测器固连在l形连接座6-2的水平段上。
[0019]
本发明的动车组过线孔智能打孔机使用时,控制系统将待打孔的过线孔方形区域设置为金属探测器的探测路径,控制横向步进电机4驱动横向丝杠机构2转动,进而驱动高度可调吊座6沿支撑框架1的横向移动,实现金属探测器横向路径的探测。同时,控制系统控制纵向步进电机5驱动纵向丝杠机构3转动,进而驱动高度可调吊座6沿支撑框架1的纵向移动,实现金属探测器纵向路径的探测。在金属探测器探测到无线缆区域过程中,控制系统发送开始钻孔指令给电钻,同时控制带齿轮步进电机6-3转动,使得齿轮沿齿条上下移动,进而带动电钻上下移动对无线缆区域进行打孔。当金属探测器探测到过线孔密封胶体内的线缆时,会发出蜂鸣声,并将探测结果传送给控制系统,控制系统控制横向步进电机4和纵向步进电机5的转动,进而更换打孔位置,从而避开蜂鸣处下方的线缆。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips