
 商标分类
商标分类  商标转让
商标转让 
一种工业用自动抓取和输送的智能平台的制作方法
 2021-02-20 02:02:32|
2021-02-20 02:02:32| 243|
243| 起点商标网
起点商标网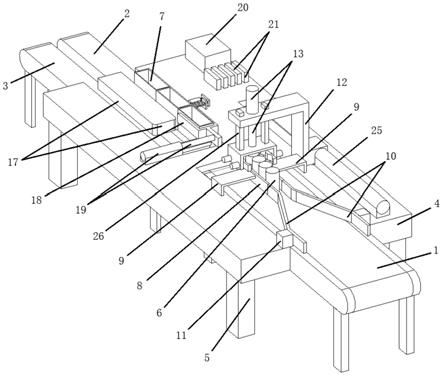
[0001]
本发明涉及工业技术领域,尤其涉及一种工业用自动抓取和输送的智能平台。
背景技术:
[0002]
工业是指原料采集与产品加工制造的产业或工程,工业是社会分工发展的产物,经过手工业、机器工业几个发展阶段,工业是第二产业的组成部分,主要分为轻工业和重工业两类。
[0003]
现有技术中的罐头、茶杯等圆柱类的产品在生产完成后,需要将产品定数装进包装盒中,而目前大多通过人工对产品进行装盒,这种装盒方式自动化程度较低,从而需要耗费较多人力,且人工在进行装盒时,需单个单个将产品进行装盒,使得装盒效率较低,为此,我们提出了一种工业用自动抓取和输送的智能平台,用于解决上述问题。
技术实现要素:
[0004]
本发明的目的是为了解决现有技术中存在现有技术中的罐头、茶杯等圆柱类的产品在生产完成后,需要将产品定数装进包装盒中,而目前大多通过人工对产品进行装盒,这种装盒方式自动化程度较低,从而需要耗费较多人力,且人工在进行装盒时,需单个单个将产品进行装盒,使得装盒效率较低的缺点,而提出的一种工业用自动抓取和输送的智能平台。
[0005]
为了实现上述目的,本发明采用了如下技术方案:
[0006]
设计一种工业用自动抓取和输送的智能平台,包括进料传送带、料盒传送带、输出传送带、工作台板,所述工作台板一侧固定连接设有若干支撑腿,所述进料传送带一侧设有若干物料,所述料盒传送带一侧设有若干物料盒,所述工作台板一侧设有进料槽,所述进料传送带固定连接在进料槽内侧,所述进料传送带一侧设有u型排列架,所述u型排列架相远离的两侧均固定连接设有l型安装架,所述l型安装架一侧均固定连接在工作台板一侧上,所述u型排列架两端均固定连接设有聚料架,所述聚料架一侧均固定连接设有连接块,所述连接块一侧均固定连接在工作台板一侧上,所述工作台板一侧可滑动式连接设有z型滑动架,所述z型滑动架一侧设有自动往返装置,所述z型滑动架一侧设有安装孔,所述安装孔内侧固定设有a气缸,所述z型滑动架一侧设有倒u型架,所述a气缸的轴端固定连接在倒u型架一侧上,所述倒u型架与z型滑动架之间设有若干导向滑动装置,所述倒u型架内侧设有两个抓取板,所述倒u型架相远离的两侧均设有若干通孔,所述通孔内侧均固定设有b气缸,所述b气缸的轴端均固定连接在抓取板一侧上,所述工作台板一侧设有两个安装槽,所述料盒传送带、输出传送带均固定连接在安装槽内侧,所述工作台板一侧设有u型槽,所述u型槽均与安装槽相连通,所述物料盒均可滑动连接在u型槽内侧,所述工作台板一侧可滑动式连接设有叉形定位架,所述物料盒滑动可拆卸式连接在叉形定位架内侧,所述工作台板一侧设有料盒阻挡释放装置,所述工作台板一侧固定连接设有c气缸,所述c气缸的轴端固定连接在叉形定位架一侧上,所述工作台板一侧固定设有控制处理器和若干电磁阀,所述控制处理
器需通过导线外接电源,所述电磁阀均需通过气管外接压缩气源,所述u型排列架一侧设有贯穿孔,所述贯穿孔内侧固定设有触碰式开关,所述触碰式开关需通过导线与控制处理器电性连接,所述a气缸、b气缸、c气缸均需通过气管与电磁阀相连接。
[0007]
优选的,所述工作台板一侧设有燕尾滑槽,所述z型滑动架一侧固定设有燕尾滑块,所述燕尾滑块可滑动连接在燕尾滑槽内侧。
[0008]
优选的,所述自动往返装置包括d气缸,所述d气缸固定连接在工作台板一侧上,所述d气缸需通过气管与电磁阀相连接,所述d气缸的轴端固定连接在z型滑动架一侧上。
[0009]
优选的,所述导向滑动装置包括导向杆,所述导向杆一端固定连接在倒u型架一侧上,所述z型滑动架一侧设有导向孔,所述导向杆可滑动连接在导向孔内侧。
[0010]
优选的,所述工作台板一侧设有t型滑槽,所述叉形定位架一侧固定设有t型滑块,所述t型滑块可滑动连接在t型滑槽内侧。
[0011]
优选的,所述料盒阻挡释放装置包括固定板,所述固定板一侧固定连接在工作台板一侧上,所述固定板一侧设有方孔,所述方孔内侧滑动连接设有连接杆,所述连接杆一端固定设有顶紧板,所述顶紧板一侧与物料盒一侧通过接触式可拆卸式连接,所述顶紧板一侧与固定板一侧之间固定设有弹簧,所述连接杆另一端固定设有限位板,所述限位板一侧设有释放气缸,所述释放气缸需通过气管与电磁阀相连接,所述释放气缸固定连接在工作台板一侧上,所述释放气缸的轴端与限位板一侧通过接触式可拆卸式连接。
[0012]
优选的,所述抓取板一侧均设有若干物料槽。
[0013]
本发明提出的一种工业用自动抓取和输送的智能平台,有益效果在于:通过设置进料传送带、工作台板、u型排列架、l型安装架、聚料架、连接块,被制作完成的物料会进料传送带被运输靠近工作台板,当物料经过聚料架时,则会被自动聚拢,然后自动排列到u型排列架内侧,使其具有自动排列功能,通过设置z型滑动架、a气缸、倒u型架、抓取板、b气缸,当物料排列到u型排列架内侧后,需控制a气缸伸出,然后控制b气缸伸出,物料即可被夹紧固定在两个抓取板之间,然后控制a气缸缩回,即可将若干个物料抓起,使其具有自动抓取功能,且可同时抓起多个物料,使其具有较高的装盒效率,通过设置自动往返装置,使z型滑动架具有往返运动功能,当若干个物料被抓起后,可控制d气缸伸出,即可将多个物料同时移动至叉形定位架内侧的物料盒的上方,然后控制a气缸伸出,然后控制b气缸缩回,即可将多个物料自动装进物料盒内,使其具有自动装盒功能,通过设置叉形定位架,使其可对物料盒进行自动定位,防止其跑偏,通过设置输出传送带、u型槽、叉形定位架、c气缸,当物料被装入物料盒内后,可控制c气缸缩回,从而可将装有物料的物料盒自动移动至输出传送带上,从而装有物料的物料盒可通过输出传送带自动输送至下一加工工位,使其具有自动输送功能,通过设置料盒阻挡释放装置,当c气缸缩回时,可防止物料盒继续前进,而c气缸伸出使叉形定位架归位后,可控制释放气缸伸出,物料盒即可继续前进,然后自动进入叉形定位架内侧,从而可实现自动连续装盒,使其具有自动排列、自动抓取、自动装盒、自动输送、自动连续装盒等功能,使其具有较高的自动化程度,从而节省人力。
附图说明
[0014]
图1为本发明提出的一种工业用自动抓取和输送的智能平台的正面轴测结构示意图;
[0015]
图2为本发明提出的一种工业用自动抓取和输送的智能平台的背面轴测结构示意图;
[0016]
图3为本发明中提出的图2中a区的局部放大结构示意图;
[0017]
图4为本发明提出的一种工业用自动抓取和输送的智能平台的侧面轴测结构示意图;
[0018]
图5为本发明提出的一种工业用自动抓取和输送的智能平台的正面局部剖切轴测结构示意图;
[0019]
图6为本发明提出的一种工业用自动抓取和输送的智能平台的局部剖切轴测结构示意图。
[0020]
图中:1进料传送带、2料盒传送带、3输出传送带、4工作台板、5支撑腿、6物料、7物料盒、8u型排列架、9l型安装架、10聚料架、11连接块、12z型滑动架、13a气缸、14倒u型架、15抓取板、16b气缸、17u型槽、18叉形定位架、19c气缸、20控制处理器、21电磁阀、22触碰式开关、23燕尾滑槽、24燕尾滑块、25d气缸、26导向杆、27t型滑槽、28t型滑块、29固定板、30连接杆、31顶紧板、32弹簧、33限位板、34释放气缸、35物料槽。
具体实施方式
[0021]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0022]
参照图1-6,一种工业用自动抓取和输送的智能平台,包括进料传送带1、料盒传送带2、输出传送带3、工作台板4,工作台板4一侧固定连接设有若干支撑腿5,进料传送带1一侧设有若干物料6,料盒传送带2一侧设有若干物料盒7,工作台板4一侧设有进料槽,进料传送带1固定连接在进料槽内侧,进料传送带1一侧设有u型排列架8,u型排列架8相远离的两侧均固定连接设有l型安装架9,l型安装架9一侧均固定连接在工作台板4一侧上,u型排列架8两端均固定连接设有聚料架10,聚料架10一侧均固定连接设有连接块11,连接块11一侧均固定连接在工作台板4一侧上,工作台板4一侧可滑动式连接设有z型滑动架12,z型滑动架12一侧设有自动往返装置,z型滑动架12一侧设有安装孔,安装孔内侧固定设有a气缸13,z型滑动架12一侧设有倒u型架14,a气缸13的轴端固定连接在倒u型架14一侧上,倒u型架14与z型滑动架12之间设有若干导向滑动装置,倒u型架14内侧设有两个抓取板15,倒u型架14相远离的两侧均设有若干通孔,通孔内侧均固定设有b气缸16,b气缸16的轴端均固定连接在抓取板15一侧上,工作台板4一侧设有两个安装槽,料盒传送带2、输出传送带3均固定连接在安装槽内侧,工作台板4一侧设有u型槽17,u型槽17均与安装槽相连通,物料盒7均可滑动连接在u型槽17内侧,工作台板4一侧可滑动式连接设有叉形定位架18,物料盒7滑动可拆卸式连接在叉形定位架18内侧,工作台板4一侧设有料盒阻挡释放装置,工作台板4一侧固定连接设有c气缸19,c气缸19的轴端固定连接在叉形定位架18一侧上,工作台板4一侧固定设有控制处理器20和若干电磁阀21,控制处理器20需通过导线外接电源,电磁阀21均需通过气管外接压缩气源,u型排列架8一侧设有贯穿孔,贯穿孔内侧固定设有触碰式开关22,触碰式开关22需通过导线与控制处理器20电性连接,a气缸13、b气缸16、c气缸19均需通过气管与电磁阀21相连接。
[0023]
具体的,工作台板4一侧设有燕尾滑槽23,z型滑动架12一侧固定设有燕尾滑块24,
燕尾滑块24可滑动连接在燕尾滑槽23内侧。
[0024]
具体的,自动往返装置包括d气缸25,d气缸25固定连接在工作台板4一侧上,d气缸25需通过气管与电磁阀21相连接,d气缸25的轴端固定连接在z型滑动架12一侧上。
[0025]
具体的,导向滑动装置包括导向杆26,导向杆26一端固定连接在倒u型架14一侧上,z型滑动架12一侧设有导向孔,导向杆26可滑动连接在导向孔内侧。
[0026]
具体的,工作台板4一侧设有t型滑槽27,叉形定位架18一侧固定设有t型滑块28,t型滑块28可滑动连接在t型滑槽27内侧。
[0027]
具体的,料盒阻挡释放装置包括固定板29,固定板29一侧固定连接在工作台板4一侧上,固定板29一侧设有方孔,方孔内侧滑动连接设有连接杆30,连接杆30一端固定设有顶紧板31,顶紧板31一侧与物料盒7一侧通过接触式可拆卸式连接,顶紧板31一侧与固定板29一侧之间固定设有弹簧32,连接杆30另一端固定设有限位板33,限位板33一侧设有释放气缸34,释放气缸34需通过气管与电磁阀21相连接,释放气缸34固定连接在工作台板4一侧上,释放气缸34的轴端与限位板33一侧通过接触式可拆卸式连接。
[0028]
具体的,抓取板15一侧均设有若干物料槽35。
[0029]
本发明,使用时通过设置进料传送带1、工作台板4、u型排列架8、l型安装架9、聚料架10、连接块11,被制作完成的物料6会进料传送带1被运输靠近工作台板4,当物料6经过聚料架10时,则会被自动聚拢,然后自动排列到u型排列架8内侧,使其具有自动排列功能,通过设置z型滑动架12、a气缸13、倒u型架14、抓取板15、b气缸16,当物料6排列到u型排列架8内侧后,需控制a气缸13伸出,然后控制b气缸16伸出,物料6即可被夹紧固定在两个抓取板15之间,然后控制a气缸13缩回,即可将若干个物料6抓起,使其具有自动抓取功能,且可同时抓起多个物料6,使其具有较高的装盒效率,通过设置自动往返装置,使z型滑动架12具有往返运动功能,当若干个物料6被抓起后,可控制d气缸25伸出,即可将多个物料6同时移动至叉形定位架18内侧的物料盒7的上方,然后控制a气缸13伸出,然后控制b气缸16缩回,即可将多个物料6自动装进物料盒7内,使其具有自动装盒功能,通过设置叉形定位架18,使其可对物料盒7进行自动定位,防止其跑偏,通过设置输出传送带3、u型槽17、叉形定位架18、c气缸19,当物料6被装入物料盒7内后,可控制c气缸19缩回,从而可将装有物料6的物料盒7自动移动至输出传送带3上,从而装有物料6的物料盒7可通过输出传送带3自动输送至下一加工工位,使其具有自动输送功能,通过设置料盒阻挡释放装置,当c气缸19缩回时,可防止物料盒7继续前进,而c气缸19伸出使叉形定位架18归位后,可控制释放气缸34伸出,物料盒7即可继续前进,然后自动进入叉形定位架18内侧,从而可实现自动连续装盒,使其具有自动排列、自动抓取、自动装盒、自动输送、自动连续装盒等功能,使其具有较高的自动化程度,从而节省人力。
[0030]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips