
 商标分类
商标分类  商标转让
商标转让 
半潜式起重拆解平台双机联吊回转方法与流程
 2021-02-20 02:02:37|
2021-02-20 02:02:37| 305|
305| 起点商标网
起点商标网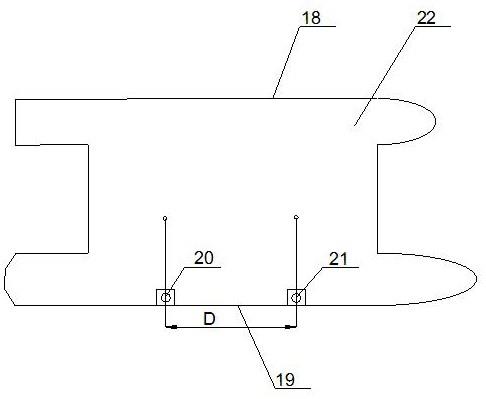
[0001]
本发明专利涉及海洋工程装备技术领域,具体为半潜式起重拆解平台双机联吊回转方法。
背景技术:
[0002]
海上油气设施退役项目数量正在大幅增加,海工平台市场正迎来新的报废高峰期。各大石油公司也放缓了对新油田开发的脚步,转而加快了对老旧、闲置平台的拆解速度。半潜式起重拆解平台为废旧油气平台拆解提供有效设备支持。在一些特定作业环境下,半潜式起重拆解平台起重系统需要双机联吊作业来提高起吊能力以及起吊可靠性。按照常规理解,两座吊机联合将负载吊起之后,向舷内回转过程就是两座吊机同步回转相同的角度,负载向舷内平行移动的过程。但是该种方式存在如下不足:一,两座吊机吊臂互相正对时,存在发生碰撞的潜在风险,仅当吊臂仰角超过一定角度时才能够避免吊臂之间的碰撞;二,吊机起吊后钢丝绳与铅垂线之间的夹角容易超出安全阈值;三,被吊货物的长度不能超过两座吊机之间的间距,所以适用范围有限;四,操作过程繁琐,需要吊机司机在吊机向船内回转的同时调整吊机的仰角。
[0003]
如图4a-4e所示,常规双机联吊回转路径轨迹中,两座吊机联合将负载吊起之后,向舷内回转过程就是两座吊机同步回转相同的角度,负载向舷内平行移动的过程。如图4a所示,确定两座吊机初始旋转角度以及吊臂俯仰参数,进而确定两座吊机初始位置,使得负载与船舷平行,吊起负载到指定高度。如图4b所示,两座吊机回转速度相同,方向相反,同步回转相同的角度,将负载向舷内平行移动。如图4c所示,当两座吊机吊臂都与船舷平行时,两座吊机吊臂互相正对。如图4d所示,两座吊机继续以大小相等,方向相反的速度,同步回转相同的角度,将负载向舷内平行移动。如图4e所示,当负载平移到终点位置时,将负载落于甲板上。
[0004]
在此过程中,存在如下不足:一,如图4c所示,此时两座吊机吊臂互相正对,存在发生碰撞的潜在风险,仅当吊臂仰角超过一定角度时才能够避免吊臂之间的碰撞;二,在图4a情况下,钢丝绳与铅垂线夹角如图5a所示,吊机钩头钢丝绳悬挂点与被吊货物上的吊点处于一条铅垂线上,钢丝绳与铅垂线夹角为零,在负载向舷内平移过程中,如果不改变吊机吊臂的俯仰角度,则到达图4b所示位置时,钢丝绳与铅垂线夹角如图5b所示,钢丝绳与铅垂线夹角为θ,当到达图4c所示位置时,θ达到最大值,而后,θ值开始减小,当到达图4e所示位置时,θ重新变为零,在此过程中,钢丝绳与铅垂线之间的夹角容易超出安全阈值;三,由于负载平行向舷内移动,所以被吊货物的长度不能超过两座吊机之间的间距,使得双机联吊适用范围有限;四,为保证钢丝绳与铅垂线之间的夹角始终在安全阈值之内,需要吊机司机在吊机向船内回转的同时调整吊机的仰角,使得回转操作较为繁琐。
技术实现要素:
[0005]
为了解决以上技术问题,本发明提供半潜式起重拆解平台双机联吊回转方法,包
括如下步骤:(一)建立两座吊机坐标系以吊机回转中心作为计算坐标原点,主甲板面作为垂向高度基准点,吊臂回转轴所在重心向左、向上、向艏为正方向。吊臂回转以逆时针为正方向,吊臂正对左舷为0度。吊臂俯仰角度以向上为正,吊臂水平状态下俯仰角为0度;(二)计算吊机辅钩回转半径回转半径计算公式为:,式中,r为吊机辅钩回转半径,为吊机回转轴线11与吊机俯仰中枢的间距,l为构件重心与俯仰中枢在吊臂轴线上的间距,e为构件重心与吊臂轴线的间距,r0为辅钩悬挂点与滑轮中心的距离,辅钩悬挂点始终与滑轮边缘相切,计算辅钩回转半径时需要加上r0,γ为俯仰角。由计算公式可知,改变俯仰角γ即可改变吊机回转半径。
[0006]
(三)确定初始位置和终点位置参数确定吊机初始旋转角度以及吊臂仰角参数后,即可确定起吊半径r、初始吊点位置,负载吊点间距d以及终点位置(终点位置与初始位置以两座吊机中心点连线为对称轴)。确定吊机初始旋转角度和吊臂仰角参数即可获取辅钩悬挂点的空间位置,通过回转半径计算公式得到起吊半径r,初始吊点位置与辅钩悬挂点在同一铅垂线上,根据辅钩悬挂点位置得到初始吊点位置,结合两座吊机各自的初始旋转角度θ1和θ2和初始间距d0,得到负载吊点间距,d=d0+rsinθ1+rsinθ2。
[0007]
(四)起吊和放置。
[0008]
双机联吊的起吊和放置划分为两大块,过程
①
从舷外起吊,然后回转至舷内,将负载落于甲板上;过程
②
从舷内甲板上将负载吊机,回转至舷外,然后将负载卸至半潜船、或者其他载具上。过程
①
与
②
互为一个逆向过程,本发明专利以过程
①
为例,进行阐述。
[0009]
(a)根据吊机初始旋转角度以及吊臂俯仰参数,确定两座吊机初始位置,使得负载与船舷平行,吊起负载到指定高度,逆时针旋转艏吊机,逆时针旋转艉吊机,直至艉吊机吊臂与负载平行,此时,艏吊机运动到极限位置i。在此过程中,两座吊机主钩钢丝绳悬挂点之间的距离保持恒定不变。由于该种回转方式的特殊性,该回转方式下,艏艉吊机同步运动至指定位置,在运动过程中,艏艉吊机的吊点之间的距离保持恒定不变,即为l1,而在回转过程中,钢丝绳悬挂点与吊机吊点始终处于同一铅垂线上,因此两座吊机主钩钢丝绳悬挂点之间的距离保持恒定不变。
[0010]
(b)逆时针旋转艉吊机,顺时针旋转艏吊机,直至艏吊机吊臂15与负载平行,此时,艉吊机吊臂运动到极限位置ⅱ,在此过程中,两座吊机主钩钢丝绳悬挂点之间的距离保持恒定不变。(c)顺时针旋转艏吊机,顺时针旋转艉吊机,直至负载与船舷平行,此时到达终点位置,在此过程中,两座吊机主钩钢丝绳悬挂点之间的距离保持恒定不变。(d)将负载落于甲板上。
[0011]
本发明的有益效果如下:一,在回转过程中,两座吊机不在同一时刻经过与船舷平行的位置,即不存在两座吊机吊臂互相正对的时刻,所以,减少了发生碰撞的危险。
[0012]
二、在回转过程中,吊机辅钩钩头钢丝绳悬挂点与被吊货物上的吊点始终处于一
条铅垂线上,所以吊机起吊后钢丝绳与铅垂线之间的夹角不容易超出安全阈值,安全性高。三,被吊货物的最大长度理论上可以达到两座吊机之间的间距加上两个吊机的回转半径,扩宽了双机联吊的适用范围。
[0013]
四,整个回转过程中,吊机作业半径始终维持为初始半径,在实际作业过程中,吊机司机仅需要对吊机的旋转角度进行控制,而无需同时注意其俯仰角度,简化操作过程。
附图说明
[0014]
图1为本发明专利双机联吊布置示意图。
[0015]
图2为本发明专利吊机结构示意图。
[0016]
图3为本发明专利吊机回转半径示意图。
[0017]
图4a-4e为常规双机联吊回转路径轨迹示意图。
[0018]
图5a-5b为常规双机联吊回转过程中钢丝绳与铅垂线夹角示意图。
[0019]
图6为本发明专利双机联吊坐标系示意图。
[0020]
图7a-7b利双机联吊回转方法原理图。
[0021]
图8a-8g为本发明专利双机联吊回转过程示意图。
[0022]
图9a-9i为负载长度为d+r1+r2时双机联吊回转过程示意图。
[0023]
图中,1.回转机构、2.吊机桅杆、3.吊臂俯仰中枢、4.吊机回转平台、5.吊机底盘、6.吊臂、7.主钩回绳、8.主钩、9.辅钩、10.小钩、11.吊机回转轴线,12.吊臂轴线,13.吊机俯仰中枢、14. 艉吊机吊臂、15. 艏吊机吊臂、16. 极限位置i、17. 极限位置ⅱ、18.左舷、19.右舷、20.艉吊机、21.艏吊机、22.平台。
具体实施方式
[0024]
为避免吊臂之间的碰撞,提高回转的安全性,同时,扩宽双机联吊适用范围,简化吊机起吊回转的操作过程,本发明提出一种半潜式起重拆解平台双机联吊回转方法,保证吊机在向船内回转的过程中,吊机钩头钢丝绳悬挂点与被吊货物上的吊点始终在一条铅垂线上,亦即保证两座吊机主钩钢丝绳悬挂点之间的距离保持恒定不变。
[0025]
下面结合附图详细说明本发明的具体实施方案。
[0026]
具体方法如下:如图1所示为双机联吊布置示意图,以半潜式起重拆解平台的平台22艏向为正方向,顺应平台22艏向左侧为左舷,顺应平台22艏向右侧为右舷,艉吊机与艏吊机分布在右舷一侧,艏吊机位于艉吊机前方,吊机之间距离为d。
[0027]
如图2所示为本发明专利中吊机结构示意图,吊机主要由桅杆顶部回转机构1、吊机桅杆2、吊臂俯仰中枢3、吊机回转平台4、吊机底盘5、吊臂6、主钩回绳7、主钩8、辅钩9和小钩10组成。主钩回绳7为变幅钢丝绳。吊机底盘5上设吊机回转平台4,吊机回转平台4上设吊机桅杆2。吊机桅杆2顶部设回转机构1,吊机桅杆2底部设设吊臂俯仰中枢3,吊臂俯仰中枢3上设吊臂6,吊臂6端部由内而外依次设主钩8、辅钩9和小钩10。回转机构1通过主钩回绳7与吊臂6端部连接。吊臂俯仰中枢3通过收放主钩回绳7实现吊臂6的俯仰,由桅杆顶部回转机构1和吊机回转平台4实现吊机的回转。
[0028]
如图3所示为吊机回转半径示意图,由图中可得回转半径计算公式为:
,式中,r为吊机回转半径,l0为吊机回转轴线11与吊机俯仰中枢13间距,l为构件重心与俯仰中枢在吊臂轴线12上的间距,e为构件重心与吊臂轴线12间距,r0为辅钩悬挂点与滑轮中心的距离,辅钩悬挂点始终与滑轮边缘相切,计算辅钩回转半径时需要加上r0,γ为俯仰角。由计算公式可知,改变俯仰角γ即可改变吊机回转半径。
[0029]
如图6所示,建立双机联吊直角坐标系,以艏吊机和艉吊机回转中心为坐标原点,主甲板面作为垂向高度基准点,平行船舷向艏为x轴正向,吊臂正对左舷为y轴正向,吊臂回转以逆时针为正方向,吊臂正对左舷为0度。
[0030]
如图7a所示,将双机联吊整个过程抽象为双摇杆机构,如图7b所示,当摇杆和连杆共线时,即艉吊臂与负载平行或艏吊臂与负载平行。摇杆位于极限位置,具体为,当艉吊机吊臂14与负载平行时,艏吊机到达极限位置i16,当艏吊机吊臂15与负载平行时,艉吊机到达极限位置ⅱ17。
[0031]
双机联吊作业可以划分为两大块,
①
从舷外起吊,然后回转至舷内,将负载落于甲板上;
②
从舷内甲板上将负载吊机,回转至舷外,让后将负载卸至半潜船、或者其他载具上。过程
①
与
②
互为一个逆向过程。下面以过程
①
为例,进行阐述。
[0032]
实施例一:本发明专利双机联吊回转过程如下:如图8a所示,负载处于回转初始位置,此时,根据吊机初始旋转角度以及吊臂俯仰参数,确定两座吊机初始位置,两座吊机的初始位置由负载决定,吊机旋转至负载上方,调节吊臂的俯仰角,使得吊机辅钩钩头钢丝绳悬挂点与被吊货物上的吊点始终处于一条铅垂线上,即可确定吊机的初始位置。进而吊机吊起负载,使得负载与船舷平行,吊起负载到指定高度。
[0033]
如图8b所示,逆时针旋转艏吊机,逆时针旋转艉吊机。逆时针旋转艏吊机和艉吊机至指定位置,此时艉吊机吊点、艏吊机吊点与艉吊机回转中心共线,可以理解为艉吊机吊臂与负载平行。
[0034]
如图8c所示,此时,艉吊机吊臂14与负载平行,艏吊机运动到极限位置i16;如图8d所示,逆时针旋转艉吊机,顺时针旋转艏吊机。
[0035]
如图8e所示,此时,艏吊机吊臂15与负载平行,艉吊机吊臂14运动到极限位置ⅱ17;如图8f所示,顺时针旋转艏吊机,顺时针旋转艉吊机。
[0036]
如图8g所示,此时,负载与船舷平行,到达终点位置,将负载落于甲板上。
[0037]
本发明双机联吊回转过程中,艏吊机与艉吊机旋转角度始终保持如下关系,其中,r1为艉吊机回转半径,r2为艏吊机回转半径,θ1为艉吊机从初始位置旋转的角度,θ2为艏吊机从初始位置旋转的角度,d为艏吊机与艉吊机回转中心之间的距离,l1为吊点间的距离。
[0038]
有益效果:根据实施例一可知,在回转过程中,旋转艏吊机和艉吊机至指定位置,当艏吊机经过与船舷平行的位置时,艉吊机位于两座吊机回转中心连线的一侧,当艉吊机经过与船舷平行的位置时,艏吊机位于两座吊机回转中心连线的一侧,因此,两座吊机不在同一时刻经过与船舷平行的位置。两座吊机不在同一时刻经过与船舷平行的位置,即不存在两座吊机吊臂互相正对的时刻,所以,减少了发生碰撞的危险。
[0039]
二、在回转过程中,两座吊机主钩钢丝绳悬挂点之间的距离保持恒定不变,这就保
证了两座吊机俯仰角的恒定,即不会出现如图5b所示情况,因此吊机辅钩钩头钢丝绳悬挂点与被吊货物上的吊点始终处于一条铅垂线上。吊机钩头钢丝绳悬挂点与被吊货物上的吊点始终处于一条铅垂线上,所以吊机起吊后钢丝绳与铅垂线之间的夹角不容易超出安全阈值,安全性高;三,如图9所示,本发明专利中,被吊货物的最大长度理论上可以达到两座吊机之间的间距加上两个吊机的回转半径,扩宽了双机联吊的适用范围;四,整个回转过程中,吊机作业半径始终维持为初始半径,在实际作业过程中,吊机司机仅需要对吊机的旋转角度进行控制,无需考虑吊机碰撞的情况下即可实现负载的移动,无需同时注意其俯仰角度,,避免了吊机碰撞的风险,简化了操作过程。
[0040]
实施例二:如图9a-9i所示,当负载长度达到两座吊机之间的间距加上两个吊机的回转半径时,此时,双机联吊回转过程如下:如图9a所示,负载处于回转初始位置,此时,根据吊机初始旋转角度以及吊臂俯仰参数,确定两座吊机初始位置,使得负载与船舷平行,吊起负载到指定高度;如图9b所示,两座吊机继续以大小相等的速度逆时针旋转,同步回转相同的角度;如图9c所示,此时,艉吊机吊臂14与负载平行,艏吊机到达极限位置ⅰ16;如图9d、图9e、和图9f所示,逆时针旋转艉吊机,顺时针旋转艏吊机;如图9g所示,此时,艏吊机吊臂15与负载平行,艉吊机到达极限位置ⅱ17;如图9h所示,两座吊机继续以大小相等的速度顺时针旋转,同步回转相同的角度;如图9i所示,此时,吊机吊臂到达终点位置,将负载落于甲板上。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 回转半径

 热门咨询
热门咨询




tips