
 商标分类
商标分类  商标转让
商标转让 
一种重型吊装无人机的制作方法
 2021-02-13 17:02:50|
2021-02-13 17:02:50| 231|
231| 起点商标网
起点商标网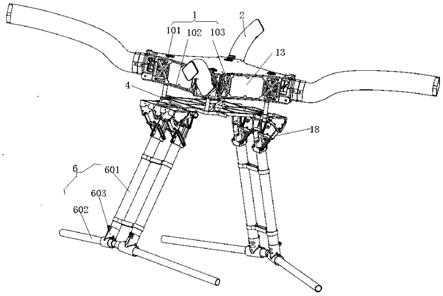
[0001]
本发明涉及无人机技术领域,尤其涉及一种重型吊装无人机。
背景技术:
[0002]
无人机即无人驾驶飞机,无人机是利用无线遥控和自身的程序及装置进行工作。可以通过无线操控实现无人机起飞、飞行和着陆。通过无人机携带相关设备能够进行空中侦察、监视、通信等获取信息的作业内容。
[0003]
近些年来随着无人机作业技术的飞速发展,无人机在诸多领域中得到了广泛的应用,例如在巡逻、安检、消防、测绘、搜救等工作中带来了便捷高效。无人机在高空作业领域中,具有简便快捷、人工劳动强度低、作业安全可靠、可定高悬停、任意地点起降等优点,可灵活地应用于多种领域场合,尤其是在消防、搜救、需抛投载荷场合中往往需要无人机将载荷物品进行定点投放。
[0004]
目前,在输变电运行中,因偏远地区突发线路故障抢修、重要地域施工跨越、高山区域金具更换等,人工作业需要步行搬运物资及器具,同时在负重登塔、绳索传递等造成人员的体力大量消耗并存在安全隐患,因此需要无人机的抛投功能。但是,目前无人机的抛投装置结构复杂,稳定性和安全性无法保证,此外,抛投装置运载的重量有限,并不能承受线路故障需要更换的金具的重量。
[0005]
因此,有必要开发一种重型吊装无人机,结构简单,能够承受较重运载物的抛投工作。
技术实现要素:
[0006]
本发明旨在解决现有技术或相关技术中存在的技术问题之一。
[0007]
为此本发明提出了一种重型吊装无人机。
[0008]
有鉴于此,本发明提出了一种重型吊装无人机,包括中心板、与所述中心板连接的机臂、设置于所述机臂一端的螺旋桨电机和螺旋桨,所述重型吊装无人机包括:
[0009]
连接板,设置在所述中心板的一侧,连接板上设有电磁铁;
[0010]
支撑起落架,包括竖腿和与所述竖腿连接的横腿,所述竖腿上设有纵向滑道,所述竖腿通过连接架与所述连接板连接;
[0011]
横板,设置于相邻的所述竖腿之间,所述横板位于所述纵向滑道内,通过第一电机控制所述横板的纵向移动,一对横板对称设置,所述横板上设有横向滑道,每个所述横向滑道内设有一对支撑板,通过第二电机控制所述支撑板在所述横向滑道内的移动;
[0012]
伞舱,与所述电磁铁连接,伞舱的下方设有吊装箱体,所述伞舱和所述吊装箱体位于所述支撑板的上方;
[0013]
控制器,设置于所述中心板内,所述控制器与遥控器连接,所述控制器控制所述第一电机、所述第二电机、所述螺旋桨电机和所述电磁铁连接。
[0014]
进一步地,所述中心板包括:上板、下板和设置于所述上板和所述下板之间的加强
筋板,所述上板和所述下板之间的中心位置设有所述控制器,所述竖腿设置于所述下板上。
[0015]
进一步地,所述支撑板上设有距离传感器,所述距离传感器与所述控制器通讯连接,所述距离传感器用于测量所述吊装箱体与所述支撑板之间的距离。
[0016]
进一步地,所述控制器控制所述电磁铁工作时,所述控制器同时控制所述第一电机、所述第二电机和所述距离传感器工作。
[0017]
进一步地,所述伞舱包括:
[0018]
腔室,所述腔室上设有舱门;
[0019]
弹力件,所述弹力件的一段与所述腔室的底壁连接,所述弹力件的另一端与所述降落伞的伞绳连接。
[0020]
进一步地,所述舱门包括:
[0021]
固定门,一对所述固定门设置在所述腔室的上方,所述固定门为空心结构,所述固定门内设有伸缩滑道;
[0022]
伸缩门,设置于所述空心结构内,通过第三电机控制所述伸缩门在所述伸缩滑道上的移动,所述第三电机与所述控制器连接。
[0023]
进一步地,所述控制器控制所述电磁铁断开时,所述控制器控制所述第三电机的工作。
[0024]
进一步地,所述底壁上设有第一连接孔,所述弹力件的下端通过弹力绳穿过所述连接孔与所述吊装箱体连接。
[0025]
进一步地,所述吊装箱体包括多个小吊装箱,多个所述小吊装箱通过所述电磁铁的吸力吸附在所述伞舱的下方,所述小吊装箱上设有第二连接孔,所述弹力绳穿过所述第二连接孔。
[0026]
进一步地,所述小吊装箱包括:
[0027]
箱体,包括内箱体和外箱体,所述外箱体的材质为低碳钢,所述内箱体为弹性材质;
[0028]
弹簧件,设置于所述内箱体和所述外箱体之间;
[0029]
弹簧腿,设置于所述箱体的底部。
[0030]
本发明提供的技术方案可以包括以下有益效果:
[0031]
通过多个电磁铁吊装,提高吊装质量,简化抛投的结构,此外,通过横板和支撑板的设置对电磁铁有一个保护作用,避免电磁铁失控,导致的吊装箱体直接下落,提高吊装的稳定性。
[0032]
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
附图说明
[0033]
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本发明的实施例,并与说明书一起用于解释本发明的原理。
[0034]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,对于本领域普通技术人员而言,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0035]
图1示出了根据本发明一个实施例的重型吊装无人机的部分立体图;
[0036]
图2示出了根据本发明一个实施例的重型吊装无人机的部分主视图;
[0037]
图3示出了根据本发明一个实施例的横板和支撑板与竖腿的连接示意图;
[0038]
图4示出了根据本发明一个实施例的横板和支撑板的连接示意图;
[0039]
图5示出了根据本发明一个实施例的伞舱和吊装箱体的抛头前示意图;
[0040]
图6示出了根据本发明一个实施例的伞舱和吊装箱体的抛投时示意图;
[0041]
图7示出了根据本发明一个实施例的去掉弹力件和降落伞的伞舱的示意图;
[0042]
图8示出了根据本发明一个实施例的小吊装箱的示意图;
[0043]
图9示出了根据本发明一个实施例的螺旋桨电机的示意图;
[0044]
图10示出了根据本发明一个实施例的吊装挂钩的示意图;
[0045]
图11示出了根据本发明一个实施例的第一电机、第二电机、距离传感器和电磁铁的联动电路图;
[0046]
图12示出了根据本发明一个实施例的第三电机和电磁铁的电路图的联动电路图。
[0047]
其中,图1至图12中的附图标记与部件名称之间的对应关系为:
[0048]
1中心板,101上板,102下板,103加强筋板,2机臂,3螺旋桨电机,4连接板,5电磁铁,6支撑起落架,601竖腿,6011纵向滑道,602横腿,603连接腿,7横板,701横向滑道,8第一电机,9第二电机,10支撑板,11伞舱,111腔室,112舱门,1121固定门,1122伸缩门,1123第三电机,113弹力件,114降落伞,115伞绳,12吊装箱体,121小吊装箱,1211外箱体,1212内箱体,1213弹簧件,1214弹簧腿,1215第二连接孔,13控制器,14距离传感器,15弹力绳,16连接柱,17吊装挂钩,171连接环,172吊装环,1721固定上部,1722移动下部,1723连通滑道,173第四电机,174吊装绳索,175重力感应器,18连接架。
具体实施方式
[0049]
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本发明相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本发明的一些方面相一致的装置和方法的例子。
[0050]
本发明提供了一种重型吊装无人机,包括中心板1、与中心板1连接的机臂2、设置于机臂2一端的螺旋桨电机3和螺旋桨,重型吊装无人机还包括:连接板4,设置在中心板1的一侧,连接板4上设有电磁铁5;支撑起落架6,包括竖腿601和与竖腿601连接的横腿602,竖腿601上设有纵向滑道6011,竖腿601通过连接架18与连接板4连接;横板7,设置于相邻的竖腿601之间,横板7位于纵向滑道6011内,通过第一电机8控制横板7的纵向移动,一对横板7对称设置,横板7上设有横向滑道701,每个横向滑道701内设有一对支撑板10,通过第二电机9控制支撑板10在横向滑道701内的移动;伞舱11,与电磁铁5连接,伞舱11的下方设有吊装箱体12,伞舱11和吊装箱体12位于支撑板10的上方;控制器13,设置于中心板1内,控制器13与遥控器连接,控制器13控制第一电机8、第二电机9、螺旋桨电机3和电磁铁5连接。
[0051]
其中,中心板1包括:上板101、下板102和设置于上板101和下板102之间的加强筋板103,上板101和下板102之间的中心位置设有控制器13,竖腿601设置于下板102上。
[0052]
上板101和下板102之间留有一定的空间,用于放置控制器13,对控制器13有一定
的保护作用,避免恶劣天气对控制器13造成损坏,影响控制的准确性,进一步地,在上板101和下板102之间通过设置加强筋板103加强中心板1的强度,根据需要运输的物品的重量选择不同厚度的加强筋板103,改变中心板1的承重能力。
[0053]
需要说明的是,螺旋桨电机3通过连接柱16与机臂2连接,连接柱16的一端为空心结构,该空心结构与机臂2的形状相匹配,连接柱16的另一端为实心结构,与螺旋桨电机3连接,对螺旋桨电机3起到一个承重作用。
[0054]
其中,支撑起落架6由竖腿601和横腿602组成,竖腿601和横腿602之间通过焊接连接,在焊接处外套一个连接腿603,对焊接处起到保护作用,避免高空风力过大或雷雨天气对焊接处的质量造成损坏,影响无人机落地的稳定性,竖腿601起到支撑作用,使连接板4与地面相距一定高度,便于吊装箱体12的放置,横腿602可以与地面平行,也可以呈一个钝角结构,横腿602的最下两个支点与地面接触,提高支撑起落架6落地的平稳性。
[0055]
进一步需要说明的是,通常竖腿601有四个,四个竖腿601相对位置设有一对横板7,通过竖腿601上的纵向滑道6011对横板7进行支撑,横板7上设有横向滑道701,每一个横板7上设有一对支撑板10,支撑板10,通常吊装箱体12为长方体或正方体,因此,支撑板10呈l型,l型支撑板10能够在四个角处实现对吊装箱体12的支撑保护,此外,在l型连接处进行圆角处理,减小无人机飞行时空中的阻力。
[0056]
通过多个电磁铁5吊装,提高吊装质量,简化抛投的结构,此外,通过横板7和支撑板10的设置对电磁铁5有一个保护作用,避免电磁铁5失控,导致的吊装箱体12直接下落,提高吊装的稳定性。
[0057]
需要说明的是,根据吊装的重量,选择不同吸附能力的电磁铁5,通过更换不同吸附能力的电磁铁5,改变不同的吊装重量,完成无人机飞行任务。
[0058]
进一步地,支撑板10上设有距离传感器14,距离传感器14与控制器13通讯连接,距离传感器14用于测量吊装箱体12与支撑板10之间的距离。
[0059]
其中,控制器13控制电磁铁5工作时,控制器13同时控制第一电机8、第二电机9和距离传感器14工作。
[0060]
通过在支撑板10上设置距离传感器14,测量吊装箱体12与支撑板10之间的距离,当与最开始的起始距离有波动,也即多个电磁铁5中有电磁铁5发生故障,导致吸附不稳定,使吊装箱体12有一定波动,当距离传感器14检测到该波动信号,则发送至控制器13,控制器13控制第一电机8使横板7向上移动贴近吊装箱体12,控制器13控制第二电机9工作,使一对支撑板10向吊装箱体12中心移动,保证l型的支撑板10能够与吊装箱体12的外形相匹配接触,提高吊装箱体12的稳定性,避免电磁铁5损坏,导致吸附力不够,没有到达抛投地点就掉落,进而影响伞舱11的正常工作,导致安全隐患。
[0061]
需要说明的是,当到达抛投地点时,控制器13控制电磁铁5断开的同时,控制第二电机9反向运动,使支撑板10在横向滑道701上朝远离吊装箱体12的方向移动,便于吊装箱体12的抛投。
[0062]
进一步地,伞舱11包括:
[0063]
腔室111,腔室111上设有舱门112;
[0064]
弹力件113,弹力件113的一段与腔室111的底壁连接,弹力件113的另一端与降落伞114的伞绳115连接。
[0065]
其中,弹力件113可以是弹簧也可以是弹板,当舱门112打开后,弹力件113将降落伞114弹出,在重力和空气的阻力的作用下,降落伞114打开,实现带着吊装箱体12在空中慢慢降落的目的,避免由于速度过高摔坏,甚至危及周边物品及人员安全。
[0066]
进一步地,舱门112包括:
[0067]
固定门1121,一对固定门1121设置在腔室111的上方,固定门1121为空心结构,固定门1121内设有伸缩滑道;
[0068]
伸缩门1122,设置于空心结构内,通过第三电机1123控制伸缩门1122在伸缩滑道上的移动,第三电机1123与控制器13连接。
[0069]
进一步地,控制器13控制电磁铁5断开时,控制器13控制第三电机1123的工作。
[0070]
其中,舱门112由固定门1121和伸缩门1122组成,通过第三电机1123控制伸缩门1122,使伸缩门1122能够在固定门1121的空心结构内移动,当控制器13控制电磁铁5断开时,控制器13控制第三电机1123转动,伸缩门1122向固定门1121内移动,将舱门112打开,便于弹力件113将降落伞114弹出,便于吊装箱体12的安全平稳降落。
[0071]
需要说明的是,在伞舱11上还设有舵机,通过舵机判断伞舱11带着吊装箱体12是否飞行至抛投地点,使吊装箱体12能够准确落在预设的抛投地点,舵机是现有比较成熟的技术,在此不再赘述。
[0072]
进一步地,底壁上设有第一连接孔,弹力件113的下端通过弹力绳15穿过连接孔与吊装箱体12连接。
[0073]
当电磁铁5没有断开时,通过电磁铁5的吸力能够将吊装箱体12牢牢吸附在伞舱11的下方,当电磁铁5断开时,吸力不复存在,吊装箱体12会与伞舱11分离,因此通过弹力绳15将伞舱11和吊装箱体12连接,保证吊装箱体12与伞舱11一同移动,并且,在吊装箱体12与伞舱11分离时,能够加强重力,进一步缩减降落伞114的开伞时间,提高吊装物抛投的稳定性,通过弹力绳15连接能够避免刚性连接产生一个更大的力,使吊装箱体12内的吊装物震动过大而发生损坏。
[0074]
进一步地,吊装箱体12包括多个小吊装箱121,多个小吊装箱121通过电磁铁5的吸力吸附在伞舱11的下方,小吊装箱121上设有第二连接孔1215,弹力绳15穿过第二连接孔1215。
[0075]
通常伞舱11为六面体,小吊装箱121组合成的吊装箱体12也呈一个六面体,通常为四个小吊装箱体12,能够对伞舱11形成一个均匀的向下拖拽的重力,进一步缩减降落伞114的开伞时间,提高吊装箱体12抛投的稳定性,多个小箱体的设置还能够运送多个部件,提高运送效率。
[0076]
进一步地,小吊装箱121包括:
[0077]
箱体,包括内箱体1212和外箱体1211,外箱体1211的材质为低碳钢,内箱体1212为弹性材质;
[0078]
弹簧件1213,设置于内箱体1212和外箱体1211之间;
[0079]
弹簧腿1214,设置于箱体的底部。
[0080]
小吊装箱121的箱体包括内箱体1212和外箱体1211,外箱体1211为低碳钢,便于电磁铁5的吸附,内箱体1212为弹性材质,提高吊装物的安全性,避免在脱离无人机和落地时产生的震荡对吊装物产生损坏,进一步地,在内箱体1212和外箱体1211之间设置弹簧件
1213,进一步提高小吊装箱121的减震性能,此外,在箱体的底部设有弹簧腿1214,提高小吊装箱121落地时稳定性,进一步提高减震性能。
[0081]
实施例1
[0082]
图1示出了根据本发明一个实施例的重型吊装无人机的部分立体图;图2示出了根据本发明一个实施例的重型吊装无人机的部分主视图;图3示出了根据本发明一个实施例的横板和支撑板与竖腿的连接示意图;图4示出了根据本发明一个实施例的横板和支撑板的连接示意图。
[0083]
如图1至图4所示,本实施例提供了一种重型吊装无人机,包括中心板1、与中心板1连接的机臂2、设置于机臂2一端的螺旋桨电机3和螺旋桨,重型吊装无人机还包括:连接板4,设置在中心板1的一侧,连接板4上设有电磁铁5;支撑起落架6,包括竖腿601和与竖腿601连接的横腿602,竖腿601上设有纵向滑道6011,竖腿601通过连接架18与连接板4连接;横板7,设置于相邻的竖腿601之间,横板7位于纵向滑道6011内,通过第一电机8控制横板7的纵向移动,一对横板7对称设置,横板7上设有横向滑道701,每个横向滑道701内设有一对支撑板10,通过第二电机9控制支撑板10在横向滑道701内的移动;伞舱11,与电磁铁5连接,伞舱11的下方设有吊装箱体12,伞舱11和吊装箱体12位于支撑板10的上方;控制器13,设置于中心板1内,控制器13与遥控器连接,控制器13控制第一电机8、第二电机9、螺旋桨电机3和电磁铁5连接。
[0084]
图9示出了根据本发明一个实施例的螺旋桨电机的示意图
[0085]
如图9所示,本实施例中螺旋桨电机3通过连接柱16与机臂2连接,连接柱16的一端为空心结构,该空心结构与机臂2的形状相匹配,连接柱16的另一端为实心结构,与螺旋桨电机3连接,对螺旋桨电机3起到一个承重作用,本实施例中每一个连接柱16上连接有两个螺旋桨电机3,缩短飞起时间,提高承重能力。
[0086]
如图1和图2所示,支撑起落架6由竖腿601和横腿602组成,竖腿601和横腿602之间通过焊接连接,在焊接处外套一个连接腿603,对焊接处起到保护作用,避免高空风力过大或雷雨天气对焊接处的质量造成损坏,影响无人机落地的稳定性,竖腿601起到支撑作用,使连接板4与地面相距一定高度,便于吊装箱体12的放置,横腿602可以与地面平行,也可以呈一个钝角结构,横腿602的最下两个支点与地面接触,提高支撑起落架6落地的平稳性。
[0087]
其中,如图1和图2所示连接架18呈三角状,连接架18的一边与连接板4连接,连接架18的一边与竖腿601连接,剩下连接架18的一边位于连接板4和竖腿601之间,起到加强固定作用,提高连接的稳定性。
[0088]
如图3和图4所示,通常竖腿601有四个,四个竖腿601相对位置设有一对横板7,通过竖腿601上的纵向滑道6011对横板7进行支撑,横板7上设有横向滑道701,每一个横板7上设有一对支撑板10,支撑板10,通常吊装箱体12为长方体或正方体,因此,支撑板10呈l型,l型支撑板10能够在四个角处实现对吊装箱体12的支撑保护,此外,在l型连接处进行圆角处理,减小无人机飞行时空中的阻力。
[0089]
本实施例中采用四个电磁铁5,分布在连接板4的四角处,提高对伞舱11和吊装箱体12吊装的稳定性,根据吊装的重量,选择不同吸附能力的电磁铁5,通过更换不同吸附能力的电磁铁5,改变不同的吊装重量,完成无人机飞行任务。
[0090]
本实施例采用的四个电磁铁5能够承受72kg至96kg的吊装物,飞行2.5km至3.5km,
由于空中风阻的作用,实际吊装重物能够达到36kg至48kg。
[0091]
进一步地,中心板1包括:上板101、下板102和设置于上板101和下板102之间的加强筋板103,上板101和下板102之间的中心位置设有控制器13,竖腿601设置于下板102上。
[0092]
上板101和下板102之间留有一定的空间,用于放置控制器13,对控制器13有一定的保护作用,避免恶劣天气对控制器13造成损坏,影响控制的准确性,进一步地,在上板101和下板102之间通过设置加强筋板103加强中心板1的强度,根据需要运输的物品的重量选择不同厚度的加强筋板103,改变中心板1的承重能力。
[0093]
除了图示的加强筋板103的形式之外,加强筋板103还可以贯穿整个上板101和下板102之间,提高中心板1的支撑吊装能力。
[0094]
进一步地,支撑板10上设有距离传感器14,距离传感器14与控制器13通讯连接,距离传感器14用于测量吊装箱体12与支撑板10之间的距离。
[0095]
其中,控制器13控制电磁铁5工作时,控制器13同时控制第一电机8、第二电机9和距离传感器14工作。
[0096]
图11示出了根据本发明一个实施例的第一电机、第二电机、距离传感器和电磁铁的联动电路图。
[0097]
通过在支撑板10上设置距离传感器14,测量吊装箱体12与支撑板10之间的距离,当与最开始的起始距离有波动,也即多个电磁铁5中有电磁铁5发生故障,导致吸附不稳定,使吊装箱体12有一定波动,如图11所示,k1和k2是联动开关,同时开启和关闭,当距离传感器14检测到该波动信号,则发送至控制器13,控制器13控制第一电机8使横板7向上移动贴近吊装箱体12,控制器13控制第二电机9工作,使一对支撑板10向吊装箱体12中心移动,保证l型的支撑板10能够与吊装箱体12的外形相匹配接触,提高吊装箱体12的稳定性,避免电磁铁5损坏,导致吸附力不够,没有到达抛投地点就掉落,进而影响伞舱11的正常工作,导致安全隐患。
[0098]
需要说明的是,当到达抛投地点时,控制器13控制电磁铁5断开的同时,控制第二电机9反向运动,使支撑板10在横向滑道701上朝远离吊装箱体12的方向移动,便于吊装箱体12的抛投。
[0099]
实施例2
[0100]
图5示出了根据本发明一个实施例的伞舱和吊装箱体的抛头前示意图;图6示出了根据本发明一个实施例的伞舱和吊装箱体的抛投时示意图。
[0101]
如图5和图6所示,在实施例1的基础上,本实施例进一步限定了伞舱11包括:
[0102]
腔室111,腔室111上设有舱门112;
[0103]
弹力件113,弹力件113的一段与腔室111的底壁连接,弹力件113的另一端与降落伞114的伞绳115连接。
[0104]
本实施例中,弹力件113为弹板,当舱门112打开后,弹板将降落伞114弹出,在重力和空气的阻力的作用下,降落伞114打开,实现带着吊装箱体12在空中慢慢降落的目的,避免由于速度过高摔坏,甚至危及周边物品及人员安全。
[0105]
图7示出了根据本发明一个实施例的去掉弹力件和降落伞的伞舱的示意图。
[0106]
如图7所示,舱门112包括:
[0107]
固定门1121,一对固定门1121设置在腔室111的上方,固定门1121为空心结构,固
定门1121内设有伸缩滑道;
[0108]
伸缩门1122,设置于空心结构内,通过第三电机1123控制伸缩门1122在伸缩滑道上的移动,第三电机1123与控制器13连接。
[0109]
其中,控制器13控制电磁铁5断开时,控制器13控制第三电机1123的工作。
[0110]
图12示出了根据本发明一个实施例的第三电机和电磁铁的电路图的联动电路图。
[0111]
舱门112由固定门1121和伸缩门1122组成,如图12所示,k3和k4为互锁开关,一个闭合另一个断开,通过第三电机1123控制伸缩门1122,使伸缩门1122能够在固定门1121的空心结构内移动,当控制器13控制电磁铁5断开时,控制器13控制第三电机1123转动,伸缩门1122向固定门1121内移动,将舱门112打开,便于弹力件113将降落伞114弹出,便于吊装箱体12的安全平稳降落。
[0112]
进一步地,底壁上设有第一连接孔,弹力件113的下端通过弹力绳15穿过连接孔与吊装箱体12连接。
[0113]
当电磁铁5没有断开时,通过电磁铁5的吸力能够将吊装箱体12牢牢吸附在伞舱11的下方,当电磁铁5断开时,吸力不复存在,吊装箱体12会与伞舱11分离,因此通过弹力绳15将伞舱11和吊装箱体12连接,保证吊装箱体12与伞舱11一同移动,并且,在吊装箱体12与伞舱11分离时,能够加强重力,进一步缩减降落伞114的开伞时间,提高吊装物抛投的稳定性,通过弹力绳15连接能够避免刚性连接产生一个更大的力,使吊装箱体12内的吊装物震动过大而发生损坏。
[0114]
实施例3
[0115]
图8示出了根据本发明一个实施例的小吊装箱的示意图。
[0116]
如图8所示,在实施例2的基础上,本实施例进一步限定了吊装箱体12包括多个小吊装箱121,多个小吊装箱121通过电磁铁5的吸力吸附在伞舱11的下方,小吊装箱121上设有第二连接孔1215,弹力绳15穿过第二连接孔1215。
[0117]
本实施例中,伞舱11为六面体,小吊装箱121组合成的吊装箱体12也呈一个六面体,本实施例采用四个小吊装箱体12,能够对伞舱11形成一个均匀的向下拖拽的重力,进一步缩减降落伞114的开伞时间,提高吊装箱体12抛投的稳定性,多个小箱体的设置还能够运送多个部件,提高运送效率。
[0118]
进一步地,小吊装箱121包括:
[0119]
箱体,包括内箱体1212和外箱体1211,外箱体1211的材质为低碳钢,内箱体1212为弹性材质;
[0120]
弹簧件1213,设置于内箱体1212和外箱体1211之间;
[0121]
弹簧腿1214,设置于箱体的底部。
[0122]
小吊装箱121的箱体包括内箱体1212和外箱体1211,外箱体1211为低碳钢,便于电磁铁5的吸附,内箱体1212为弹性材质,提高吊装物的安全性,避免在脱离无人机和落地时产生的震荡对吊装物产生损坏,进一步地,在内箱体1212和外箱体1211之间设置弹簧件1213,进一步提高小吊装箱121的减震性能,此外,在箱体的底部设有弹簧腿1214,提高小吊装箱121落地时稳定性,进一步提高减震性能。
[0123]
实施例4
[0124]
图10示出了根据本发明一个实施例的吊装挂钩的示意图。
[0125]
如图10所示,在实施例1的基础上,本实施例中在连接板4中心设置一个吊装挂钩17,可以用于紧急救援,吊装挂钩17包括:
[0126]
连接环171,连接板4中心连接;
[0127]
吊装环172,包括固定上部1721和移动下部1722,固定上部1721下方设有缺口,固定上部1721和移动下部1722能够形成一个圆环结构,固定上部1721与连接环171固定连接,固定上部1721的两端设有连通滑到,移动下部1722能够在连通滑道1723内移动;
[0128]
吊装绳索174,设置在移动下部1722上;
[0129]
第四电机173,设置在所述固定上部1721上,第四电机173控制移动下部1722在连通滑到内移动漏出缺口,第四电机173与控制器13电连接;
[0130]
重力感应器175,设置在固定上部1721上,重力感应器175与控制器13通讯连接。
[0131]
本实施例的重型吊装无人机可以用于紧急救援,吊装遇到海难时船上的物资,减轻船舶的重量,或吊装被困山中人员的物资,减轻被困人员的负重,重力感应器175获取初始重量,在运输过程中,当重力感应器175的重量超过初始重量的1.5倍至2倍时,控制器13接收到超重信号,控制器13控制第四电机173工作,使移动下部1722在连通滑道1723上移动,流出固定上部1721的缺口,完成吊装绳索174与吊装环172的脱离,避免无人机坠毁,避免经济损失的同时,还能够提高安全性,避免无人机坠毁带来更大的安全隐患。
[0132]
本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本发明的其它实施方案。本申请旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由下面的权利要求指出。
[0133]
应当理解的是,本发明并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本发明的范围仅由所附的权利要求来限制。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 无人机

 热门咨询
热门咨询




tips