
 商标分类
商标分类  商标转让
商标转让 
一种单旋翼自稳定无人机的制作方法
 2021-02-13 17:02:00|
2021-02-13 17:02:00| 327|
327| 起点商标网
起点商标网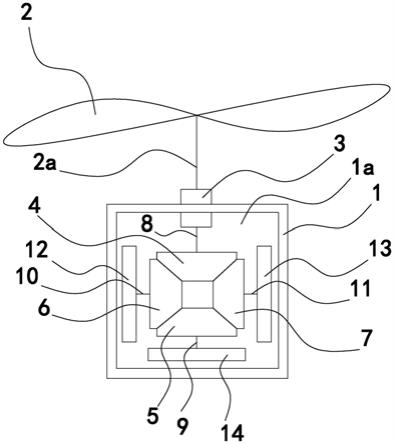
[0001]
本发明属于无人机技术领域,涉及一种单旋翼自稳定无人机。
背景技术:
[0002]
无人驾驶飞机简称“无人机”(“uav”),是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞行器。无人机实际上是无人驾驶飞行器的统称。
[0003]
目前无人机大多是四旋翼,但这样需要四个叶片及四个电机,虽然控制灵活、机体稳定,但是四个旋翼要耗散掉大量能量,且噪音大,结构复杂,机器体积较大。而传统的单旋翼飞机却需要尾螺旋桨给予平衡力矩。
技术实现要素:
[0004]
本发明的目的是针对现有的技术存在上述问题,提出了一种无需尾螺旋桨也能使得机体稳定的单旋翼自稳定无人机。
[0005]
本发明的目的可通过下列技术方案来实现:一种单旋翼自稳定无人机,包括机体和旋翼,其特征在于:所述的机体上设有四个依次首尾相互啮合连接的锥齿轮和一个两端均具有输出轴的电机,四个所述锥齿轮分别为上锥齿轮、下锥齿轮、左锥齿轮和右锥齿轮,所述左锥齿轮啮合连接在上锥齿轮和下锥齿轮之间,所述右锥齿轮啮合连接在上锥齿轮和下锥齿轮之间,所述左锥齿轮和右锥齿轮之间相互不接触,所述上锥齿轮、下锥齿轮、左锥齿轮和右锥齿轮上分别具有上齿轮轴、下齿轮轴、左齿轮轴和右齿轮轴,所述电机的其中一输出轴与上述上齿轮轴连接,另一输出轴与所述旋翼的旋翼轴连接,所述下齿轮轴端部固连有下惯性轮,所述左齿轮轴端部固连有左惯性轮,所述右齿轮轴端部固连有右惯性轮,所述旋翼轴、电机两输出轴、上齿轮轴、上锥齿轮、下锥齿轮、下齿轮轴和下惯性轮各自的轴心线位于同一直线上,所述左惯性轮、左齿轮轴、左锥齿轮、右锥齿轮、右齿轮轴和右惯性轮各自的轴心线位于同一直线上。
[0006]
双端轴电机为其电机输出轴的两端均伸出电机机壳外,因此两端上均可用于连接传递力矩。
[0007]
在上述的一种单旋翼自稳定无人机中,所述的电机包含电机机壳,所述电机机壳通过螺栓固定安装在机体上。
[0008]
在上述的一种单旋翼自稳定无人机中,所述的电机为无壳电机,所述电机的定子和转子直接设置于机体上,所述电机的定子直接嵌设在机体内实现固定安装。
[0009]
该电机没有电机机壳,将定子和转子直接安装在机体内,机体充当了电机机壳。
[0010]
在上述的一种单旋翼自稳定无人机中,所述的上锥齿轮、下锥齿轮、左锥齿轮和右锥齿轮,以及左惯性轮、右惯性轮和下惯性轮均位于机体的内部。
[0011]
在上述的一种单旋翼自稳定无人机中,所述的机体的内部具有0.5atm~1atm的真空度,其中,1atm为一个标准大气压值。
[0012]
与现有技术相比,本单旋翼自稳定无人机为单旋翼且无需尾螺旋桨等结构也能够
实现对无人机的稳定及调节控制,从而结构简单,控制方便。
附图说明
[0013]
图1是本发明的结构示意图。
[0014]
图中,1、机体;1a、内腔;2、旋翼;2a、旋翼轴;3、电机;4、上锥齿轮;5、下锥齿轮;6、左锥齿轮;7、右锥齿轮;8、上齿轮轴;9、下齿轮轴;10、左齿轮轴;11、右齿轮轴;12、左惯性轮;13、右惯性轮;14、下惯性轮。
具体实施方式
[0015]
以下是本发明的具体实施例并结合附图,对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
[0016]
如图1所示,本单旋翼自稳定无人机,包括机体1和旋翼2,机体1上设有四个首尾依次相互啮合连接的锥齿轮和一个两端均具有输出轴的电机3,电机3包含电机机壳,电机机壳通过螺栓固定安装在机体1上。电机3为其电机输出轴的两端均伸出电机机壳外,因此两端上均可用于连接传递力矩。当然,本实施例中的电机也可以为无壳电机,电机的定子和转子直接设置于机体1内,电机的定子直接嵌设在机体1内实现固定安装,该电机没有电机机壳,将定子和转子直接安装在机体1内,机体1充当了电机机壳,从而简化结构,降低成本同时减轻该无人机整体重量,节约能源。
[0017]
四个锥齿轮分别为上锥齿轮4、下锥齿轮5、左锥齿轮6和右锥齿轮7,左锥齿轮6啮合连接在上锥齿轮4和下锥齿轮5之间,右锥齿轮7啮合连接在上锥齿轮4和下锥齿轮5之间,左锥齿轮6和右锥齿轮7之间相互不接触,上锥齿轮4、下锥齿轮5、左锥齿轮6和右锥齿轮7上分别具有上齿轮轴8、下齿轮轴9、左齿轮轴10和右齿轮轴11,电机3的其中一输出轴与上齿轮轴8连接,另一输出轴与旋翼2的旋翼轴2a连接,下齿轮轴9端部固连有下惯性轮14,左齿轮轴10端部固连有左惯性轮12,右齿轮轴11端部固连有右惯性轮13,旋翼轴2a、电机3两输出轴、上齿轮轴8、上锥齿轮4、下锥齿轮5、下齿轮轴9和下惯性轮14各自的轴心线位于同一直线上,左惯性轮12、左齿轮轴10、左锥齿轮6、右锥齿轮7、右齿轮轴11和右惯性轮13各自的轴心线位于同一直线上。
[0018]
工作时,电机3工作电机输出轴上端通过旋翼轴2a驱动旋翼2旋转,下端通过上齿轮轴8驱动上锥齿轮4转动,上锥齿轮4转动分别驱动左锥齿轮6和右锥齿轮7向相反两个旋转方向转动,同时驱动左惯性轮12和右惯性轮13向相反两个旋转方向转动工作,此时左惯性轮12和右惯性轮13的旋转方向刚好相反;左锥齿轮6和右锥齿轮7转动同时带动下锥齿轮5于上锥齿轮4相反的旋转方向转动从而带动下惯性轮14于旋翼2相反的旋转方向转动工作,此时,旋翼2和下惯性轮14的旋转方向刚好相反。工作时,旋翼2、下惯性轮14、左惯性轮12和右惯性轮13为同时转动,由于各锥齿轮的啮合传动方式,使得左惯性轮12和右惯性轮13的角动量大小相等方向相反,旋翼2和下惯性轮14的转动方向相反(但两者的转动惯量可以相同也可不相同)。由于左惯性轮12与右惯性轮13的角动量大小相等方向相反,转动时左惯性轮12和右惯性轮13各自相当于一个陀螺,根据陀螺的力学效应可知,两个惯性轮具有自稳定特性,可以抵抗垂直于纸面方向的干扰力矩及与旋翼轴2a方向同向的干扰力矩,保证机体1不会左右反转和前后反转。而下惯性轮14的陀螺力学特性能够抵抗沿左、右惯性轮
13轴线方向的干扰力矩。因此,本无人机采用单旋翼且通过左、右惯性轮13可以抵抗旋翼轴2a轴向的力矩干扰,所以无需采用传统的尾螺旋桨来抵挡旋翼2对机体1的发作用力矩也能在飞行时保持稳定平稳,从而该无人机结构简单,轻便,节约能源且降低制造及使用成本。
[0019]
其中,角动量(angular momentum)在物理学中是和物体到原点的位移和动量相关的物理量。它表征质点矢径扫过面积速度的大小,或刚体定轴转动的剧烈程度。角动量在物理学中是与物体到原点的位移和动量相关的物理量。在经典力学中可被定义为物体到原点的位移(矢径)和其动量的叉积:
[0020]
l=r
×
p=r
×
(mv)=mr
2
ω=iω
[0021]
其中,r表示以质点到旋转中心(轴心)的距离(标量值可以理解为半径的大小),方向由原点指向物体位置的矢量(即矢径),l表示角动量,v表示线速度,p表示动量,i表示转动惯量,ω表示角速度(矢量)。角动量是矢量,且是轴矢量。其量纲为[l]
2
[m][t]-1
,si单位制中单位为kg
·
m
2
/s。角动量的方向:角动量是两个矢量的叉乘,在右手坐标系里遵循右手螺旋法则,即右手四指指向矢径的方向,转过一个小于180度的平面角后四指指向动量的方向,则大拇指所指的方向为角动量的方向。
[0022]
转动惯量(moment of inertia)是刚体绕轴转动时惯性(回转物体保持其匀速圆周运动或静止的特性)的量度,用字母i或j表示。在经典力学中,转动惯量(又称质量惯性矩,简称惯距)通常以i或j表示,si单位为kg
·
m
2
。对于一个质点,i=mr
2
,其中m是其质量,r是质点和转轴的垂直距离。转动惯量在旋转动力学中的角色相当于线性动力学中的质量,可形式地理解为一个物体对于旋转运动的惯性,用于建立角动量、角速度、力矩和角加速度等数个量之间的关系。
[0023]
进一步的,由于各惯性轮和各锥齿轮体积较小,因此将机体1设计成一个具有封闭内腔1a的长方体壳体,将上锥齿轮4、下锥齿轮5、左锥齿轮6和右锥齿轮7,以及左惯性轮12、右惯性轮13和下惯性轮14均安装在机体1的内腔1a中,将机体1内腔1a形成0.5atm~1atm的真空度,其中,1atm为一个标准大气压值,如此可以降低上锥齿轮4、下锥齿轮5、左锥齿轮6和右锥齿轮7,以及左惯性轮12、右惯性轮13和下惯性轮14工作时的能量耗散损失,噪音也会大大减小。
[0024]
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips