
 商标分类
商标分类  商标转让
商标转让 
多边形螺旋桨直升机的制作方法
 2021-02-13 13:02:45|
2021-02-13 13:02:45| 235|
235| 起点商标网
起点商标网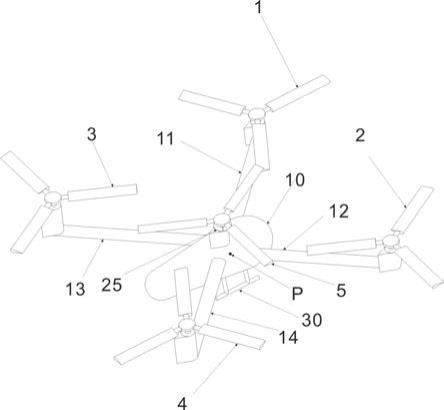
[0001]
本发明涉及一种不依赖机场,外围采用四个或四个以上相同的定距螺旋桨,这些定距螺旋桨的旋转中心的连线在水平面的投影是多边形,多边形的中心设置一个不同的定距螺旋桨或变距螺旋桨组成的实现垂直升降、悬停、前后左右飞行的多边形螺旋桨直升机。
背景技术:
[0002]
目前公知的能实现垂直升降、前后左右飞行、悬停的直升机的成功方法有四螺旋桨直升机,四螺旋桨直升机具有结构简单、操纵灵活和可靠性高的优点,但四螺旋桨直升机采用四个完全相同的、桨距较小的定距螺旋桨,载重量小,续航时间短。
技术实现要素:
[0003]
为了提高四螺旋桨直升机的载重量,并增大续航时间,本发明提供一种多边形螺旋桨直升机,实现这一目标。
[0004]
本发明解决其技术问题所采用的技术方案是:机身顶部重心的上边设置中心螺旋桨,中心螺旋桨的旋转面水平,中心螺旋桨的旋转中心和多边形螺旋桨直升机的重心在水平面的投影重叠,以中心螺旋桨的旋转中心为四边或四边以上的多边形的中心作一个水平的四边或四边以上的多边形,该水平多边形的中心、中心螺旋桨的旋转中心和多边形螺旋桨直升机的重心在水平面的投影重叠。
[0005]
当水平多边形是正方形时,设置四个相同的定距螺旋桨在该水平正方形的四个顶角上,这些定距螺旋桨的旋转面水平,这些定距螺旋桨的旋转中心分别在该水平正方形的四个顶角上,该水平正方形的一条边平行机身纵轴,该边的邻边垂直机身纵轴,使在该水平正方形的四个顶角上的定距螺旋桨对称于机身纵轴。
[0006]
当水平多边形是长方形时,设置四个相同的定距螺旋桨在该水平长方形的四个顶角上,这些定距螺旋桨的旋转面水平,这些定距螺旋桨的旋转中心分别在该水平长方形的四个顶角上,该水平长方形的长边平行机身纵轴,该水平长方形的短边垂直机身纵轴,使在该水平长方形的四个顶角上的定距螺旋桨对称于机身纵轴。
[0007]
当水平多边形是正五边形时,设置五个相同的定距螺旋桨在该水平正五边形的五个顶角上,这些定距螺旋桨的旋转面水平,这些定距螺旋桨的旋转中心分别在该水平正五边形的五个顶角上,该水平正五边形的一个顶角在机身纵轴上,且在重心之后,使在该水平正五边形的另外四个顶角上的定距螺旋桨对称于机身纵轴。
[0008]
当水平多边形是正六边形时,设置六个相同的定距螺旋桨在该水平正六边形的六个顶角上,这些定距螺旋桨的旋转面水平,这些定距螺旋桨的旋转中心分别在该水平正六边形的六个顶角上,该水平正六边形的两个对顶角在机身经过重心的横轴上,使在该水平正六边形的六个顶角上的定距螺旋桨对称于机身纵轴。
[0009]
水平多边形各顶角到水平多边形的中心的距离大于中心螺旋桨的半径与水平多边形顶角上的单个定距螺旋桨的半径之和,使所有的螺旋桨的旋转面相互不重叠。
[0010]
当水平多边形是正方形时,设置四个相同的定距螺旋桨在该水平正方形的四个顶角上,一个左前定距螺旋桨在机身左前方,机身左边靠前设置一条前掠的左前臂,支撑左前定距螺旋桨,一个左后定距螺旋桨在机身左后方,机身左边靠后设置一条后掠的左后臂,支撑左后定距螺旋桨,对称地,一个右前定距螺旋桨在机身右前方,机身左边靠前设置一条前掠的右前臂,支撑右前定距螺旋桨,一个右后定距螺旋桨在机身右后方,机身右边靠后设置一条后掠的右后臂,支撑右后定距螺旋桨。
[0011]
在低速的应用场合,设置全部定距螺旋桨和中心螺旋桨的旋转面的高度相同,在高速的应用场合,设置后面的螺旋桨比前面的螺旋桨的旋转面的高度高,为了简化说明,以后面的螺旋桨比前面的螺旋桨的旋转面的高度高为例子。
[0012]
左后定距螺旋桨和右后定距螺旋桨的旋转面的高度相同,比中心螺旋桨的旋转面的高度高;左前定距螺旋桨和右前定距螺旋桨的旋转面的高度相同,比中心螺旋桨的旋转面的高度低。
[0013]
左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨是完全相同的定距螺旋桨,中心螺旋桨是与左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨不同的定距螺旋桨或变距螺旋桨,当中心螺旋桨采用变距螺旋桨时,设置桨距控制器操纵中心螺旋桨的桨距变化。
[0014]
设置水平正方形顶角上的定距螺旋桨的旋转方向相同,设置水平正方形顶角上的定距螺旋桨的旋转方向与中心螺旋桨的旋转方向相反。
[0015]
左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨的旋转方向相同,左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨的旋转方向与中心螺旋桨的旋转方向相反。
[0016]
设置四个相同的发动机分别驱动左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨,设置另一个不同的发动机驱动中心螺旋桨,驱动中心螺旋桨的发动机的功率大于或等于驱动水平正方形顶角上的四个定距螺旋桨的发动机的功率的总和。
[0017]
当水平多边形是长方形时,设置四个相同的定距螺旋桨在该水平长方形的四个顶角上,一个左前定距螺旋桨在机身左前方,机身左边靠前设置一条前掠的左前臂,支撑左前定距螺旋桨,一个左后定距螺旋桨在机身左后方,机身左边靠后设置一条后掠的左后臂,支撑左后定距螺旋桨,对称地,一个右前定距螺旋桨在机身右前方,机身左边靠前设置一条前掠的右前臂,支撑右前定距螺旋桨,一个右后定距螺旋桨在机身右后方,机身右边靠后设置一条后掠的右后臂,支撑右后定距螺旋桨。
[0018]
在低速的应用场合,设置全部定距螺旋桨和中心螺旋桨的旋转面的高度相同,在高速的应用场合,设置后面的螺旋桨比前面的螺旋桨的旋转面的高度高,为了简化说明,以后面的螺旋桨比前面的螺旋桨的旋转面的高度高为例子。
[0019]
左后定距螺旋桨和右后定距螺旋桨的旋转面的高度相同,比中心螺旋桨的旋转面的高度高;左前定距螺旋桨和右前定距螺旋桨的旋转面的高度相同,比中心螺旋桨的旋转面的高度低。
[0020]
左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨是完全相同的定距螺旋桨,中心螺旋桨是与左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨不同的定距螺旋桨或变距螺旋桨,当中心螺旋桨采用变距螺旋桨时,设置桨
距控制器操纵中心螺旋桨的桨距变化。
[0021]
设置水平长方形顶角上的定距螺旋桨的旋转方向相同,设置水平长方形顶角上的定距螺旋桨的旋转方向与中心螺旋桨的旋转方向相反。
[0022]
左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨的旋转方向相同,左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨的旋转方向与中心螺旋桨的旋转方向相反。
[0023]
设置四个相同的发动机分别驱动左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨,设置另一个不同的发动机驱动中心螺旋桨,驱动中心螺旋桨的发动机的功率大于或等于驱动水平长方形顶角上的四个定距螺旋桨的发动机的功率的总和。
[0024]
当水平多边形是正五边形时,设置五个相同的定距螺旋桨在该水平正五边形的五个顶角上,一个左前定距螺旋桨在机身左前方,机身左边靠前设置一条前掠的左前臂,支撑左前定距螺旋桨,一个左后定距螺旋桨在机身左后方,机身左边靠后设置一条后掠的左后臂,支撑左后定距螺旋桨,对称地,一个右前定距螺旋桨在机身右前方,机身左边靠前设置一条前掠的右前臂,支撑右前定距螺旋桨,一个右后定距螺旋桨在机身右后方,机身右边靠后设置一条后掠的右后臂,支撑右后定距螺旋桨,一个尾定距螺旋桨在机身尾部,机身尾部支撑尾定距螺旋桨。
[0025]
在低速的应用场合,设置全部定距螺旋桨和中心螺旋桨的旋转面的高度相同,在高速的应用场合,设置后面的螺旋桨比前面的螺旋桨的旋转面的高度高,为了简化说明,以后面的螺旋桨比前面的螺旋桨的旋转面的高度高为例子。
[0026]
左后定距螺旋桨和右后定距螺旋桨的旋转面的高度相同,比中心螺旋桨的旋转面的高度高;尾定距螺旋桨的旋转面的高度比左后定距螺旋桨和右后定距螺旋桨的旋转面的高度高;左前定距螺旋桨和右前定距螺旋桨的旋转面的高度相同,比中心螺旋桨的旋转面的高度低。
[0027]
左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨和尾定距螺旋桨是完全相同的定距螺旋桨,中心螺旋桨是与左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨和尾定距螺旋桨不同的定距螺旋桨或变距螺旋桨,当中心螺旋桨采用变距螺旋桨时,设置桨距控制器操纵中心螺旋桨的桨距变化。
[0028]
设置水平正五边形顶角上的定距螺旋桨的旋转方向相同,设置水平正五边形顶角上的定距螺旋桨的旋转方向与中心螺旋桨的旋转方向相反。
[0029]
左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨和尾定距螺旋桨的旋转方向相同,左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨和尾定距螺旋桨的旋转方向与中心螺旋桨的旋转方向相反。
[0030]
设置五个相同的发动机分别驱动左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨和尾定距螺旋桨,设置另一个不同的发动机驱动中心螺旋桨,驱动中心螺旋桨的发动机的功率大于或等于驱动水平正五边形顶角上的五个定距螺旋桨的发动机的功率的总和。
[0031]
当水平多边形是正六边形时,设置六个相同的定距螺旋桨在该水平正六边形的六个顶角上,一个左前定距螺旋桨在机身左前方,机身左边靠前设置一条前掠的左前臂,支撑左前定距螺旋桨,一个左边定距螺旋桨在机身中部重心左边,机身中部重心左边,设置一条
左臂,支撑中部重心左边定距螺旋桨,一个左后定距螺旋桨在机身左后方,机身左边靠后设置一条后掠的左后臂,支撑左后定距螺旋桨,对称地,一个右前定距螺旋桨在机身右前方,机身左边靠前设置一条前掠的右前臂,支撑右前定距螺旋桨,一个右边定距螺旋桨在机身中部重心右边,机身中部重心右边,设置一条右臂,支撑中部重心右边定距螺旋桨,一个右后定距螺旋桨在机身右后方,机身右边靠后设置一条后掠的右后臂,支撑右后定距螺旋桨。
[0032]
在低速的应用场合,设置全部定距螺旋桨和中心螺旋桨的旋转面的高度相同,在高速的应用场合,设置后面的螺旋桨比前面的螺旋桨的旋转面的高度高,为了简化说明,以后面的螺旋桨比前面的螺旋桨的旋转面的高度高为例子。
[0033]
左后定距螺旋桨和右后定距螺旋桨的旋转面的高度相同,比中心螺旋桨的旋转面的高度高;中部重心左边定距螺旋桨、中部重心右边定距螺旋桨和中心螺旋桨的旋转面的高度相同;左前定距螺旋桨和右前定距螺旋桨的旋转面的高度相同,比中心螺旋桨的旋转面的高度低。
[0034]
左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨、中部重心左边定距螺旋桨和中部重心右边定距螺旋桨是完全相同的定距螺旋桨,中心螺旋桨是与左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨、中部重心左边定距螺旋桨和中部重心右边定距螺旋桨不同的定距螺旋桨或变距螺旋桨,当中心螺旋桨采用变距螺旋桨时,设置桨距控制器操纵中心螺旋桨的桨距变化。
[0035]
设置水平正六边形顶角上的定距螺旋桨的旋转方向相同,设置水平正六边形顶角上的定距螺旋桨的旋转方向与中心螺旋桨的旋转方向相反。
[0036]
左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨、中部重心左边定距螺旋桨和中部重心右边定距螺旋桨的旋转方向相同,左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨、中部重心左边定距螺旋桨和中部重心右边定距螺旋桨的旋转方向与中心螺旋桨的旋转方向相反。
[0037]
设置六个相同的发动机分别驱动左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨、右后定距螺旋桨、中部重心左边定距螺旋桨和中部重心右边定距螺旋桨,设置另一个不同的发动机驱动中心螺旋桨,驱动中心螺旋桨的发动机的功率大于或等于驱动水平正六边形顶角上的六个定距螺旋桨的发动机的功率的总和。
[0038]
机身下靠近重心附近设置起落架。
[0039]
发动机采用燃油发动机或电机驱动,或者全部采用电机驱动螺旋桨,或者全部采用电机驱动水平多边形顶角上的定距螺旋桨,采用燃油发动机驱动中心螺旋桨的油电混合方法。
[0040]
多边形螺旋桨直升机的飞行原理是:以水平多边形是正方形时为例子,其他水平多边形在实施例中说明,设左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨都采用完全相同的定距螺旋桨,中心螺旋桨是与左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨不同的变距螺旋桨,中心螺旋桨的桨距由桨距控制器操纵变化,左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨顺时针转,中心螺旋桨逆时针转。
[0041]
在左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨转动时,当左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨的反扭矩之和等
于中心螺旋桨的反扭矩,而方向相反,左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨及右后定距螺旋桨和中心螺旋桨的反扭矩相互抵消,多边形螺旋桨直升机保持航向稳定。
[0042]
加大五个发动机的油门,使左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨和中心螺旋桨的转速增加,同时操纵桨距控制器使中心螺旋桨的桨距跟随油门的增加而增加,五个螺旋桨的升力加大,当总升力大于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机垂直上升。
[0043]
减少五个发动机的油门,使左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨和中心螺旋桨的转速减少,同时操纵桨距控制器使中心螺旋桨的桨距跟随油门的减少而减少,五个螺旋桨的升力减少,当总升力等于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机悬停。
[0044]
继续减少五个发动机的油门,使左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨和中心螺旋桨的转速减少,同时操纵桨距控制器使中心螺旋桨的桨距跟随油门的减少而减少,五个螺旋桨的升力减少,当总升力小于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机垂直下降。
[0045]
当多边形螺旋桨直升机在空中时,加大左前定距螺旋桨、左后定距螺旋桨的转速,左前定距螺旋桨、左后定距螺旋桨的升力增大,同时,减少右前定距螺旋桨、右后定距螺旋桨的转速,右前定距螺旋桨、右后定距螺旋桨的升力减少,使机身向右横滚,在操纵向右横滚的过程中,左前定距螺旋桨、左后定距螺旋桨的转速增大,升力增大,反扭矩增大,右前定距螺旋桨、右后定距螺旋桨的转速减少,升力减少,反扭矩减少,左前定距螺旋桨、左后定距螺旋桨和右前定距螺旋桨、右后定距螺旋桨的反扭矩和不变,操纵向右横滚时航向保持稳定;减少左前定距螺旋桨、左后定距螺旋桨的转速,左前定距螺旋桨、左后定距螺旋桨的升力减少,同时,增大右前定距螺旋桨、右后定距螺旋桨的转速,右前定距螺旋桨、右后定距螺旋桨的升力增大,使机身向左横滚,在操纵向左横滚的过程中,左前定距螺旋桨、左后定距螺旋桨的转速减少,升力减少,反扭矩减少,右前定距螺旋桨、右后定距螺旋桨的转速增大,升力增大,反扭矩增大,左前定距螺旋桨、左后定距螺旋桨和右前定距螺旋桨、右后定距螺旋桨的反扭矩和不变,操纵向左横滚时航向保持稳定,实现横滚操纵。
[0046]
当多边形螺旋桨直升机在空中时,加大左后定距螺旋桨、右后定距螺旋桨的转速,左后定距螺旋桨、右后定距螺旋桨的升力增大,同时,减少左前定距螺旋桨、右前定距螺旋桨的转速,左前定距螺旋桨、右前定距螺旋桨的升力减少,使机身前俯,在操纵前俯的过程中,左后定距螺旋桨、右后定距螺旋桨的转速增大,升力增大,反扭矩增大,左前定距螺旋桨、右前定距螺旋桨的转速减少,升力减少,反扭减少,左后定距螺旋桨、右后定距螺旋桨及左前定距螺旋桨、右前定距螺旋桨的反扭矩和不变,操纵前俯时航向保持稳定;减少左后定距螺旋桨、右后定距螺旋桨的转速,左后定距螺旋桨、右后定距螺旋桨的升力减少,同时,增大左前定距螺旋桨、右前定距螺旋桨的转速,左前定距螺旋桨、右前定距螺旋桨的升力增大,使机身后仰,在操纵后仰的过程中,左后定距螺旋桨、右后定距螺旋桨的转速减少,升力减少,反扭矩减少,左前定距螺旋桨、右前定距螺旋桨的转速增大,升力增大,反扭增大,左后定距螺旋桨、右后定距螺旋桨及左前定距螺旋桨、右前定距螺旋桨的反扭矩和不变,操纵后仰时航向保持稳定,实现俯仰操纵。
[0047]
当多边形螺旋桨直升机在空中时,操纵中心螺旋桨的桨距控制器加大中心螺旋桨
的桨距,中心螺旋桨的升力增大,反扭矩增大,同时,相同减少左后定距螺旋桨、右后定距螺旋桨、左前定距螺旋桨及右前定距螺旋桨的转速,左后定距螺旋桨、右后定距螺旋桨、左前定距螺旋桨及右前定距螺旋桨的升力减少,反扭矩减少,中心螺旋桨的反扭矩大于左后定距螺旋桨、右后定距螺旋桨、左前定距螺旋桨及右前定距螺旋桨的反扭矩之和,由于中心螺旋桨逆时针转,反扭矩使多边形螺旋桨直升机顺时针转,即向右旋转方向,在操纵向右旋转方向的过程中,中心螺旋桨的桨距增大,升力增大,左后定距螺旋桨、右后定距螺旋桨、左前定距螺旋桨及右前定距螺旋桨的转速减少,升力减少,总升力不变,多边形螺旋桨直升机保持垂直方向的稳定;操纵中心螺旋桨的桨距控制器减少中心螺旋桨的桨距,中心螺旋桨的升力减少,反扭矩减少,同时,相同增大左后定距螺旋桨、右后定距螺旋桨、左前定距螺旋桨及右前定距螺旋桨的转速,左后定距螺旋桨、右后定距螺旋桨、左前定距螺旋桨及右前定距螺旋桨的升力增大,反扭矩增大,中心螺旋桨的反扭矩小于左后定距螺旋桨、右后定距螺旋桨、左前定距螺旋桨及右前定距螺旋桨的反扭矩之和,由于左后定距螺旋桨、右后定距螺旋桨、左前定距螺旋桨及右前定距螺旋桨顺时针转,反扭矩使多边形螺旋桨直升机逆时针转,即向左旋转方向,在操纵向左旋转方向的过程中,中心螺旋桨的桨距减少,升力减少,左后定距螺旋桨、右后定距螺旋桨、左前定距螺旋桨及右前定距螺旋桨的转速增大,升力增大,总升力不变,多边形螺旋桨直升机保持垂直方向的稳定,实现航向操纵。
[0048]
当中心螺旋桨采用定距螺旋桨时,操纵俯仰,横滚的方式与中心螺旋桨采用变距螺旋桨时的操纵方式相同,操纵航向的方式不同。
[0049]
设左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨都采用完全相同的定距螺旋桨,中心螺旋桨是与左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨不同的定距螺旋桨,左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨顺时针转,中心螺旋桨逆时针转。
[0050]
在左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨转动时,当左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨的反扭矩之和等于中心螺旋桨的反扭矩,而方向相反,左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨和中心螺旋桨的反扭矩相互抵消,多边形螺旋桨直升机保持航向稳定。
[0051]
加大五个发动机的油门,使左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨和中心螺旋桨的转速增加,五个螺旋桨的升力加大,当总升力大于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机垂直上升。
[0052]
减少五个发动机的油门,使左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨和中心螺旋桨的转速减少,五个螺旋桨的升力减少,当总升力等于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机悬停。
[0053]
继续减少五个发动机的油门,使左前定距螺旋桨、右前定距螺旋桨、左后定距螺旋桨和右后定距螺旋桨和中心螺旋桨的转速减少,五个螺旋桨的升力减少,当总升力小于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机垂直下降。
[0054]
当多边形螺旋桨直升机在空中时,加大左前定距螺旋桨、左后定距螺旋桨的转速,左前定距螺旋桨、左后定距螺旋桨的升力增大,同时,减少右前定距螺旋桨、右后定距螺旋桨的转速,右前定距螺旋桨、右后定距螺旋桨的升力减少,使机身向右横滚,在操纵向右横滚的过程中,左前定距螺旋桨、左后定距螺旋桨的转速增大,升力增大,反扭矩增大,右前定
距螺旋桨、右后定距螺旋桨的转速减少,升力减少,左前定距螺旋桨、左后定距螺旋桨反扭矩减少,左前定距螺旋桨、左后定距螺旋桨和右前定距螺旋桨、右后定距螺旋桨的反扭矩和不变,操纵向右横滚时航向保持稳定;减少左前定距螺旋桨、左后定距螺旋桨的转速,左前定距螺旋桨、左后定距螺旋桨的升力减少,同时,增大右前定距螺旋桨、右后定距螺旋桨的转速,右前定距螺旋桨、右后定距螺旋桨的升力增大,使机身向左横滚,在操纵向左横滚的过程中,左前定距螺旋桨、左后定距螺旋桨的转速减少,升力减少,反扭矩减少,右前定距螺旋桨、右后定距螺旋桨的转速增大,升力减少,左前定距螺旋桨、左后定距螺旋桨反扭矩增大,左前定距螺旋桨、左后定距螺旋桨和右前定距螺旋桨、右后定距螺旋桨的反扭矩和不变,操纵向左横滚时航向保持稳定,实现横滚操纵。
[0055]
当多边形螺旋桨直升机在空中时,加大左后定距螺旋桨、右后定距螺旋桨的转速,左后定距螺旋桨、右后定距螺旋桨的升力增大,同时,减少左前定距螺旋桨、右前定距螺旋桨的转速,左前定距螺旋桨、右前定距螺旋桨的升力减少,使机身前俯,在操纵前俯的过程中,左后定距螺旋桨、右后定距螺旋桨的转速增大,升力增大,反扭矩增大,左前定距螺旋桨、右前定距螺旋桨的转速减少,升力减少,反扭减少,左后定距螺旋桨、右后定距螺旋桨及左前定距螺旋桨、右前定距螺旋桨的反扭矩和不变,操纵前俯时航向保持稳定;减少左后定距螺旋桨、右后定距螺旋桨的转速,左后定距螺旋桨、右后定距螺旋桨的升力减少,同时,增大左前定距螺旋桨、右前定距螺旋桨的转速,左前定距螺旋桨、右前定距螺旋桨的升力增大,使机身后仰,在操纵后仰的过程中,左后定距螺旋桨、右后定距螺旋桨的转速减少,升力减少,反扭矩减少,左前定距螺旋桨、右前定距螺旋桨的转速增大,升力增大,反扭增大,左后定距螺旋桨、右后定距螺旋桨及左前定距螺旋桨、右前定距螺旋桨的反扭矩和不变,操纵后仰时航向保持稳定,实现俯仰操纵。
[0056]
当多边形螺旋桨直升机在空中时,增大中心螺旋桨的转速,中心螺旋桨的升力增大,反扭矩增大,同时,相同减少左后定距螺旋桨、右后定距螺旋桨、左前定距螺旋桨及右前定距螺旋桨的转速,左后定距螺旋桨、右后定距螺旋桨、左前定距螺旋桨及右前定距螺旋桨的升力减少,反扭矩减少,中心螺旋桨的反扭矩大于左后定距螺旋桨、右后定距螺旋桨、左前定距螺旋桨及右前定距螺旋桨的反扭矩之和,由于中心螺旋桨逆时针转,反扭矩使多边形螺旋桨直升机顺时针转,即向右旋转方向,在操纵向右旋转方向的过程中,中心螺旋桨的转速增大,升力增大,左后定距螺旋桨、右后定距螺旋桨、左前定距螺旋桨及右前定距螺旋桨的转速减少,升力减少,总升力不变,多边形螺旋桨直升机保持垂直方向的稳定;减少中心螺旋桨的转速,中心螺旋桨的升力减少,反扭矩减少,同时,相同增大左后定距螺旋桨、右后定距螺旋桨、左前定距螺旋桨及右前定距螺旋桨的转速,左后定距螺旋桨、右后定距螺旋桨、左前定距螺旋桨及右前定距螺旋桨的升力增大,反扭矩增大,中心螺旋桨的反扭矩小于左后定距螺旋桨、右后定距螺旋桨、左前定距螺旋桨及右前定距螺旋桨的反扭矩之和,由于左后定距螺旋桨、右后定距螺旋桨、左前定距螺旋桨及右前定距螺旋桨顺时针转,反扭矩使多边形螺旋桨直升机逆时针转,即向左旋转方向,在操纵向左旋转方向的过程中,中心螺旋桨的转速减少,升力减少,左后定距螺旋桨、右后定距螺旋桨、左前定距螺旋桨及右前定距螺旋桨的转速增大,升力增大,总升力不变,多边形螺旋桨直升机保持垂直方向的稳定,实现航向操纵。
[0057]
当多边形螺旋桨直升机在空中时,操纵机身前俯,同时加大五个发动机的油门,多
边形螺旋桨直升机向前飞行;操纵机身后仰,同时加大五个发动机的油门,多边形螺旋桨直升机向后飞行;操纵机身前俯和向左旋转方向,同时加大五个发动机的油门,多边形螺旋桨直升机向左前方飞行;操纵机身前俯和向右旋转方向,同时加大五个发动机的油门,多边形螺旋桨直升机向右前方飞行;操纵机身向左横滚,同时加大五个发动机的油门,多边形螺旋桨直升机向左侧飞行;操纵机身向右横滚,同时加大五个发动机的油门,多边形螺旋桨直升机向右侧飞行。
[0058]
本发明的有益效果是,水平多边形顶角上定距螺旋桨是完全相同的定距螺旋桨,中心螺旋桨是与水平多边形顶角上定距螺旋桨不同的定距螺旋桨或变距螺旋桨,设置相同的发动机分别驱动水平多边形顶角上定距螺旋桨,设置另一个发动机驱动中心螺旋桨,由于驱动中心螺旋桨的发动机的功率大于或等于驱动水平多边形顶角上的定距螺旋桨的发动机的功率的总和,所以多边形螺旋桨直升机的总升力增大一倍,机身重量没有成倍增大,载重量提高了,多边形螺旋桨直升机,具有结构简单,载重量大的优点,适合长时间飞行。
附图说明
[0059]
下面结合附图和实施例对本发明进一步说明。
[0060]
图1是本发明第一个实施例的二视图。
[0061]
图2是本发明第一个实施例的飞行原理图。
[0062]
图3是本发明第二个实施例二视图。
[0063]
图4是本发明第二个实施例的飞行原理图。
[0064]
图5是本发明第三个实施例二视图。
[0065]
图6是本发明第三个实施例的飞行原理图。
[0066]
图7是本发明第四个实施例二视图。
[0067]
图8是本发明第四个实施例的飞行原理图。
[0068]
图9是本发明第五个实施例二视图。
[0069]
图10是本发明第五个实施例的飞行原理图。
[0070]
图11是本发明第一个实施例的斜视图。
[0071]
图中1. 左前定距螺旋桨,2. 右前定距螺旋桨,3. 左后定距螺旋桨, 4. 右后定距螺旋桨,5. 采用变距螺旋桨的中心螺旋桨, 6. 尾定距螺旋桨,7. 左中定距螺旋桨,8. 右中定距螺旋桨,10.机身, 11. 左前臂,12. 右前臂,13. 左后臂,14. 右后臂,15.机身尾部,17. 左中臂,18. 右中臂,25. 中心螺旋桨的总距控制器,30. 起落架,51.采用定距螺旋桨的中心螺旋桨,x1. 左前定距螺旋桨的旋转中心,x2. 右前定距螺旋桨的旋转中心,x3. 左后定距螺旋桨的旋转中心,x4. 右后定距螺旋桨的旋转中心,x5.采用变距螺旋桨的中心螺旋桨的旋转中心,x51.采用定距螺旋桨的中心螺旋桨的旋转中心,x6. 尾定距螺旋桨的旋转中心,x7. 左中定距螺旋桨的旋转中心,x8. 右中定距螺旋桨的旋转中心,d4. 水平正方形,d4x.水平正方形的中心,d41. 水平长方形,d41x.水平长方形的中心,d5. 水平正五边形,d5x.水平正五边形的中心,d6. 水平正六边形,d6x.水平正六边形的中心,x. 机身纵轴,s. 螺旋桨顺时针转,n.螺旋桨逆时针转,p.重心。
具体实施方式
[0072]
图1所示实施例中,机身10顶部重心p的上边设置采用变距螺旋桨的中心螺旋桨5,中心螺旋桨5的旋转面水平,中心螺旋桨的旋转中心x5和多边形螺旋桨直升机的重心p在水平面的投影重叠,参见图2,以中心螺旋的旋转中心x5为正方形的中心作一个水平的正方形d4,中心螺旋桨的旋转中心x5、多边形螺旋桨直升机的重心p和水平的正方形d4的中心d4x在水平面的投影重叠。
[0073]
设置四个相同的定距螺旋桨在该水平正方形d4的四个顶角上,每个定距螺旋桨的旋转中心在各自对应的顶角上,机身10的左前方设置一个左前定距螺旋桨1,左后方设置一个左后定距螺旋桨3;对称地,机身10的右前方设置一个右前定距螺旋桨2,右后方设置一个右后定距螺旋桨4,在该水平正方形d4顶角上左边的定距螺旋桨与右边的定距螺旋桨对称于机身纵轴x,该水平正方形d4对角的长度大于中心螺旋桨5的直径与水平正方形d4顶角上的单个定距螺旋桨的直径之和,使全部螺旋桨的旋转面相互不重叠。
[0074]
机身10左边靠前设置一条前掠的左前臂11,支撑左前定距螺旋桨1,机身10左边靠后设置一条后掠的左后臂13,支撑左后定距螺旋桨3,对称地,机身10右边靠前设置一条前掠的右前臂12,支撑右前定距螺旋桨2,机身10右边靠后设置一条后掠的右后臂14,支撑右后定距螺旋桨4。
[0075]
四个相同的定距螺旋桨的旋转面水平设置。
[0076]
左后定距螺旋桨3和右后定距螺旋桨4的旋转面的高度相同,比中心螺旋桨5的旋转面的高度高;左前定距螺旋桨1和右前定距螺旋桨2的旋转面的高度相同,比中心螺旋桨5的旋转面的高度低,参见图1侧视图。
[0077]
左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3和右后定距螺旋桨4是完全相同的定距螺旋桨,中心螺旋桨5是与左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3和右后定距螺旋桨4不同的变距螺旋桨,设置桨距控制器25操纵中心螺旋桨5的桨距变化。
[0078]
设置水平正方形d4顶角上的左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3和右后定距螺旋桨4顺时针转,设置中心螺旋桨5逆时针转。
[0079]
设置四个相同的发动机分别驱动左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3和右后定距螺旋桨4,设置另一个发动机驱动中心螺旋桨5,驱动中心螺旋桨5的发动机的功率大于或等于驱动水平正方形d4顶角上的定距螺旋桨的发动机的功率的总和。
[0080]
机身10下靠近重心p附近设置起落架30。
[0081]
这种中心螺旋桨5是变距螺旋桨,四个定距螺旋桨设置在水平正方形d4顶角上的多边形螺旋桨直升机的飞行原理是:在左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4和中心螺旋桨5转动时,当左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3及右后定距螺旋桨4的反扭矩之和等于中心螺旋桨5的反扭矩,而方向相反,左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3及右后定距螺旋桨4和中心螺旋桨5的反扭矩相互抵消,多边形螺旋桨直升机保持航向稳定。
[0082]
加大五个发动机的油门,使左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨
3、右后定距螺旋桨4和中心螺旋桨5的转速增加,同时操纵桨距控制器25使中心螺旋桨5的桨距跟随油门的增加而增加,五个螺旋桨的升力加大,当总升力大于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机垂直上升。
[0083]
减少五个发动机的油门,使左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4和中心螺旋桨5的转速减少,同时操纵桨距控制器25使中心螺旋桨5的桨距跟随油门的减少而减少,五个螺旋桨的升力减少,当总升力等于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机悬停。
[0084]
继续减少五个发动机的油门,使左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4和中心螺旋桨5的转速减少,同时操纵桨距控制器25使中心螺旋桨5的桨距跟随油门的减少而减少,五个螺旋桨的升力减少,当总升力小于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机垂直下降。
[0085]
当多边形螺旋桨直升机在空中时,加大左前定距螺旋桨1、左后定距螺旋桨3的转速,左前定距螺旋桨1、左后定距螺旋桨3的升力增大,同时,减少右前定距螺旋桨2、右后定距螺旋桨4的转速,右前定距螺旋桨2、右后定距螺旋桨4的升力减少,使机身10向右横滚,在操纵向右横滚的过程中,左前定距螺旋桨1、左后定距螺旋桨3的转速增大,升力增大,反扭矩增大,右前定距螺旋桨2、右后定距螺旋桨4的转速减少,升力减少,反扭矩减少,左前定距螺旋桨1、左后定距螺旋桨3和右前定距螺旋桨2、右后定距螺旋桨4的反扭矩和不变,操纵向右横滚时航向保持稳定;减少左前定距螺旋桨1、左后定距螺旋桨3的转速,左前定距螺旋桨1、左后定距螺旋桨3的升力减少,同时,增大右前定距螺旋桨2,右后定距螺旋桨4的转速,右前定距螺旋桨2、右后定距螺旋桨4的升力增大,使机身10向左横滚,在操纵向左横滚的过程中,左前定距螺旋桨1、左后定距螺旋桨3的转速减少,升力减少,反扭矩减少,右前定距螺旋桨2、右后定距螺旋桨4的转速增大,升力增大,反扭矩增大,左前定距螺旋桨1、左后定距螺旋桨3和右前定距螺旋桨2、右后定距螺旋桨4的反扭矩和不变,操纵向左横滚时航向保持稳定,实现横滚操纵。
[0086]
当多边形螺旋桨直升机在空中时,加大左后定距螺旋桨3、右后定距螺旋桨4的转速,左后定距螺旋桨3、右后定距螺旋桨4的升力增大,同时,减少左前定距螺旋桨1、右前定距螺旋桨2的转速,左前定距螺旋桨1、右前定距螺旋桨2的升力减少,使机身前俯,在操纵前俯的过程中,左后定距螺旋桨3、右后定距螺旋桨4的转速增大,升力增大,反扭矩增大,左前定距螺旋桨1、右前定距螺旋桨2的转速减少,升力减少,反扭减少,左后定距螺旋桨3、右后定距螺旋桨4及左前定距螺旋桨1、右前定距螺旋桨2的反扭矩和不变,操纵前俯时航向保持稳定;减少左后定距螺旋桨3、右后定距螺旋桨4的转速,左后定距螺旋桨3、右后定距螺旋桨4的升力减少,同时,增大左前定距螺旋桨1、右前定距螺旋桨2的转速,左前定距螺旋桨1、右前定距螺旋桨2的升力增大,使机身后仰,在操纵后仰的过程中,左后定距螺旋桨3、右后定距螺旋桨4的转速减少,升力减少,反扭矩减少,左前定距螺旋桨1、右前定距螺旋桨2的转速增大,升力增大,反扭增大,左后定距螺旋桨3、右后定距螺旋桨4及左前定距螺旋桨1、右前定距螺旋桨2的反扭矩和不变,操纵后仰时航向保持稳定,实现俯仰操纵。
[0087]
当多边形螺旋桨直升机在空中时,操纵中心螺旋桨的桨距控制器25加大中心螺旋桨5的桨距,中心螺旋桨5的升力增大,反扭矩增大,同时,相同减少左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的转速,左后定距螺旋桨3、右后定距螺
旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的升力减少,反扭矩减少,中心螺旋桨5的反扭矩大于左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的反扭矩之和,由于中心螺旋桨5逆时针转n,参见图2,反扭矩使多边形螺旋桨直升机顺时针转s,即向右旋转方向,在操纵向右旋转方向的过程中,中心螺旋桨5的桨距增大,升力增大,左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的转速减少,升力减少,总升力不变,多边形螺旋桨直升机保持垂直方向的稳定;操纵中心螺旋桨的桨距控制器25减少中心螺旋桨5的桨距,中心螺旋桨5的升力减少,反扭矩减少,同时,相同增大左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的转速,左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的升力增大,反扭矩增大,中心螺旋桨5的反扭矩小于左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的反扭矩之和,由于左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2顺时针转s,参见图2,反扭矩使多边形螺旋桨直升机逆时针转n,即向左旋转方向,在操纵向左旋转方向的过程中,中心螺旋桨5的桨距减少,升力减少,左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的转速增大,升力增大,总升力不变,多边形螺旋桨直升机保持垂直方向的稳定,实现航向操纵。
[0088]
图3所示实施例中,机身10顶部重心p的上边设置采用定距螺旋桨的中心螺旋桨51,中心螺旋桨51的旋转面水平,中心螺旋桨的旋转中心x51和多边形螺旋桨直升机的重心p在水平面的投影重叠,参见图4,以中心螺旋的旋转中心x51为正方形的中心作一个水平的正方形d4,中心螺旋桨的旋转中心x51、多边形螺旋桨直升机的重心p和水平的正方形d4的中心d4x在水平面的投影重叠。
[0089]
设置四个相同的定距螺旋桨在该水平正方形d4的四个顶角上,每个定距螺旋桨的旋转中心在各自的顶角上,机身10的左前方设置一个左前定距螺旋桨1,左后方设置一个左后定距螺旋桨3;对称地,机身10的右前方设置一个右前定距螺旋桨2,右后方设置一个右后定距螺旋桨4,在该水平正方形d4顶角上左边的定距螺旋桨与右边的定距螺旋桨对称于机身纵轴x,该水平正方形d4对角的长度大于中心螺旋桨51的直径与水平正方形d4顶角上的单个定距螺旋桨的直径之和,使全部螺旋桨的旋转面相互不重叠。
[0090]
机身10左边靠前设置一条前掠的左前臂11,支撑左前定距螺旋桨1,机身10左边靠后设置一条后掠的左后臂13,支撑左后定距螺旋桨3,对称地,机身10右边靠前设置一条前掠的右前臂12,支撑右前定距螺旋桨2,机身10右边靠后设置一条后掠的右后臂14,支撑右后定距螺旋桨4。
[0091]
四个相同的定距螺旋桨的旋转面水平设置。
[0092]
左后定距螺旋桨3和右后定距螺旋桨4的旋转面的高度相同,比中心螺旋桨51的旋转面的高度高;左前定距螺旋桨1和右前定距螺旋桨2的旋转面的高度相同,比中心螺旋桨5的旋转面的高度低。
[0093]
左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3和右后定距螺旋桨4是完全相同的定距螺旋桨,中心螺旋桨51是与左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3和右后定距螺旋桨4不同的定距螺旋桨。
[0094]
设置水平正方形d4顶角上的左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3和右后定距螺旋桨4顺时针转,设置中心螺旋桨51逆时针转。
[0095]
设置四个相同的发动机分别驱动左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3和右后定距螺旋桨4,设置另一个发动机驱动中心螺旋桨51,驱动中心螺旋桨51的发动机的功率大于或等于驱动水平正方形d4顶角上的定距螺旋桨的发动机的功率的总和。
[0096]
机身10下靠近重心p附近设置起落架30。
[0097]
这种中心螺旋桨51是定距螺旋桨,四个定距螺旋桨设置在水平正方形d4顶角上的多边形螺旋桨直升机的飞行原理是:在左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4和中心螺旋桨51转动时,当左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3及右后定距螺旋桨4的反扭矩之和等于中心螺旋桨51的反扭矩,而方向相反,左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3及右后定距螺旋桨4和中心螺旋桨51的反扭矩相互抵消,多边形螺旋桨直升机保持航向稳定。
[0098]
加大五个发动机的油门,使左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4和中心螺旋桨51的转速增加,五个螺旋桨的升力加大,当总升力大于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机垂直上升。
[0099]
减少五个发动机的油门,使左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4和中心螺旋桨51的转速减少,五个螺旋桨的升力减少,当总升力等于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机悬停。
[0100]
继续减少五个发动机的油门,使左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4和中心螺旋桨51的转速减少,五个螺旋桨的升力减少,当总升力小于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机垂直下降。
[0101]
当多边形螺旋桨直升机在空中时,加大左前定距螺旋桨1、左后定距螺旋桨3的转速,左前定距螺旋桨1、左后定距螺旋桨3的升力增大,同时,减少右前定距螺旋桨2、右后定距螺旋桨4的转速,右前定距螺旋桨2、右后定距螺旋桨4的升力减少,使机身10向右横滚,在操纵向右横滚的过程中,左前定距螺旋桨1、左后定距螺旋桨3的转速增大,升力增大,反扭矩增大,右前定距螺旋桨2、右后定距螺旋桨4的转速减少,升力减少,反扭矩减少,左前定距螺旋桨1、左后定距螺旋桨3和右前定距螺旋桨2、右后定距螺旋桨4的反扭矩和不变,操纵向右横滚时航向保持稳定;减少左前定距螺旋桨1、左后定距螺旋桨3的转速,左前定距螺旋桨1、左后定距螺旋桨3的升力减少,同时,增大右前定距螺旋桨2,右后定距螺旋桨4的转速,右前定距螺旋桨2、右后定距螺旋桨4的升力增大,使机身10向左横滚,在操纵向左横滚的过程中,左前定距螺旋桨1、左后定距螺旋桨3的转速减少,升力减少,反扭矩减少,右前定距螺旋桨2、右后定距螺旋桨4的转速增大,升力增大,反扭矩增大,左前定距螺旋桨1、左后定距螺旋桨3和右前定距螺旋桨2、右后定距螺旋桨4的反扭矩和不变,操纵向左横滚时航向保持稳定,实现横滚操纵。
[0102]
当多边形螺旋桨直升机在空中时,加大左后定距螺旋桨3、右后定距螺旋桨4的转速,左后定距螺旋桨3、右后定距螺旋桨4的升力增大,同时,减少左前定距螺旋桨1、右前定距螺旋桨2的转速,左前定距螺旋桨1、右前定距螺旋桨2的升力减少,使机身前俯,在操纵前俯的过程中,左后定距螺旋桨3、右后定距螺旋桨4的转速增大,升力增大,反扭矩增大,左前定距螺旋桨1、右前定距螺旋桨2的转速减少,升力减少,反扭减少,左后定距螺旋桨3、右后
定距螺旋桨4及左前定距螺旋桨1、右前定距螺旋桨2的反扭矩和不变,操纵前俯时航向保持稳定;减少左后定距螺旋桨3、右后定距螺旋桨4的转速,左后定距螺旋桨3、右后定距螺旋桨4的升力减少,同时,增大左前定距螺旋桨1、右前定距螺旋桨2的转速,左前定距螺旋桨1、右前定距螺旋桨2的升力增大,使机身后仰,在操纵后仰的过程中,左后定距螺旋桨3、右后定距螺旋桨4的转速减少,升力减少,反扭矩减少,左前定距螺旋桨1、右前定距螺旋桨2的转速增大,升力增大,反扭增大,左后定距螺旋桨3、右后定距螺旋桨4及左前定距螺旋桨1、右前定距螺旋桨2的反扭矩和不变,操纵后仰时航向保持稳定,实现俯仰操纵。
[0103]
当多边形螺旋桨直升机在空中时,增大中心螺旋桨51的转速,中心螺旋桨51的升力增大,反扭矩增大,同时,相同减少左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的转速,左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的升力减少,反扭矩减少,中心螺旋桨51的反扭矩大于左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的反扭矩之和,由于中心螺旋桨51逆时针转n,参见图4,反扭矩使多边形螺旋桨直升机顺时针转s,即向右旋转方向,在操纵向右旋转方向的过程中,中心螺旋桨51的转速增大,升力增大,左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的转速减少,升力减少,总升力不变,多边形螺旋桨直升机保持垂直方向的稳定;减少中心螺旋桨51的转速,中心螺旋桨51的升力减少,反扭矩减少,同时,相同增大左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的转速,左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的升力增大,反扭矩增大,中心螺旋桨51的反扭矩小于左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的反扭矩之和,由于左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2顺时针转s,参见图4,反扭矩使多边形螺旋桨直升机逆时针转n,即向左旋转方向,在操纵向左旋转方向的过程中,中心螺旋桨51的转速减少,升力减少,左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的转速增大,升力增大,总升力不变,多边形螺旋桨直升机保持垂直方向的稳定,实现航向操纵。
[0104]
图5所示实施例中,机身10顶部重心p的上边设置采用变距螺旋桨的中心螺旋桨5,中心螺旋桨5的旋转面水平,中心螺旋桨的旋转中心x5和多边形螺旋桨直升机的重心p在水平面的投影重叠,参见图6,以中心螺旋的旋转中心x5为长方形的中心作一个水平的长方形d41,中心螺旋桨的旋转中心x5、多边形螺旋桨直升机的重心p和水平长方形d41的中心d41x在水平面的投影重叠。
[0105]
设置四个相同的定距螺旋桨在该水平长方形d41的四个顶角上,每个定距螺旋桨的旋转中心在各自的顶角上,机身10的左前方设置一个左前定距螺旋桨1,左后方设置一个左后定距螺旋桨3;对称地,机身10的右前方设置一个右前定距螺旋桨2,右后方设置一个右后定距螺旋桨4,在该水平长方形d41顶角上左边的定距螺旋桨与右边的定距螺旋桨对称于机身纵轴x,该水平长方形d41对角的长度大于中心螺旋桨5的直径与水平长方形d41顶角上的单个定距螺旋桨的直径之和,使全部螺旋桨的旋转面相互不重叠。
[0106]
机身10左边靠前设置一条前掠的左前臂11,支撑左前定距螺旋桨1,机身10左边靠后设置一条后掠的左后臂13,支撑左后定距螺旋桨3,对称地,机身10右边靠前设置一条前掠的右前臂12,支撑右前定距螺旋桨2,机身10右边靠后设置一条后掠的右后臂14,支撑右
后定距螺旋桨4。
[0107]
四个相同的定距螺旋桨的旋转面水平设置。
[0108]
左后定距螺旋桨3和右后定距螺旋桨4的旋转面的高度相同,比中心螺旋桨5的旋转面的高度高;左前定距螺旋桨1和右前定距螺旋桨2的旋转面的高度相同,比中心螺旋桨5的旋转面的高度低。
[0109]
左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3和右后定距螺旋桨4是完全相同的定距螺旋桨,中心螺旋桨5是与左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3和右后定距螺旋桨4不同的变距螺旋桨,设置桨距控制器25操纵中心螺旋桨5的桨距变化。
[0110]
设置水平长方形d41顶角上的左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3和右后定距螺旋桨4顺时针转,设置中心螺旋桨5逆时针转。
[0111]
设置四个相同的发动机分别驱动左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3和右后定距螺旋桨4,设置另一个发动机驱动中心螺旋桨5,驱动中心螺旋桨5的发动机的功率大于或等于驱动水平长方形d41顶角上的定距螺旋桨的发动机的功率的总和。
[0112]
机身10下靠近重心附近设置起落架30。
[0113]
这种中心螺旋桨5是变距螺旋桨,四个定距螺旋桨分别设置在水平长方形d41的四个顶角上的多边形螺旋桨直升机的飞行原理是:在左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4和中心螺旋桨5转动时,当左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3及右后定距螺旋桨4的反扭矩之和等于中心螺旋桨5的反扭矩,而方向相反,左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3及右后定距螺旋桨4和中心螺旋桨5的反扭矩相互抵消,多边形螺旋桨直升机保持航向稳定。
[0114]
加大五个发动机的油门,使左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4和中心螺旋桨5的转速增加,同时操纵桨距控制器25使中心螺旋桨5的桨距跟随油门的增加而增加,五个螺旋桨的升力加大,当总升力大于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机垂直上升。
[0115]
减少五个发动机的油门,使左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4和中心螺旋桨5的转速减少,同时操纵桨距控制器25使中心螺旋桨5的桨距跟随油门的减少而减少,五个螺旋桨的升力减少,当总升力等于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机悬停。
[0116]
继续减少五个发动机的油门,使左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4和中心螺旋桨5的转速减少,同时操纵桨距控制器25使中心螺旋桨5的桨距跟随油门的减少而减少,五个螺旋桨的升力减少,当总升力小于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机垂直下降。
[0117]
当多边形螺旋桨直升机在空中时,加大左前定距螺旋桨1、左后定距螺旋桨3的转速,左前定距螺旋桨1、左后定距螺旋桨3的升力增大,同时,减少右前定距螺旋桨2、右后定距螺旋桨4的转速,右前定距螺旋桨2、右后定距螺旋桨4的升力减少,使机身10向右横滚,在操纵向右横滚的过程中,左前定距螺旋桨1、左后定距螺旋桨3的转速增大,升力增大,反扭
矩增大,右前定距螺旋桨2、右后定距螺旋桨4的转速减少,升力减少,反扭矩减少,左前定距螺旋桨1、左后定距螺旋桨3和右前定距螺旋桨2、右后定距螺旋桨4的反扭矩和不变,操纵向右横滚时航向保持稳定;减少左前定距螺旋桨1、左后定距螺旋桨3的转速,左前定距螺旋桨1、左后定距螺旋桨3的升力减少,同时,增大右前定距螺旋桨2,右后定距螺旋桨4的转速,右前定距螺旋桨2、右后定距螺旋桨4的升力增大,使机身10向左横滚,在操纵向左横滚的过程中,左前定距螺旋桨1、左后定距螺旋桨3的转速减少,升力减少,反扭矩减少,右前定距螺旋桨2、右后定距螺旋桨4的转速增大,升力增大,反扭矩增大,左前定距螺旋桨1、左后定距螺旋桨3和右前定距螺旋桨2、右后定距螺旋桨4的反扭矩和不变,操纵向左横滚时航向保持稳定,实现横滚操纵。
[0118]
当多边形螺旋桨直升机在空中时,加大左后定距螺旋桨3、右后定距螺旋桨4的转速,左后定距螺旋桨3、右后定距螺旋桨4的升力增大,同时,减少左前定距螺旋桨1、右前定距螺旋桨2的转速,左前定距螺旋桨1、右前定距螺旋桨2的升力减少,使机身前俯,在操纵前俯的过程中,左后定距螺旋桨3、右后定距螺旋桨4的转速增大,升力增大,反扭矩增大,左前定距螺旋桨1、右前定距螺旋桨2的转速减少,升力减少,反扭减少,左后定距螺旋桨3、右后定距螺旋桨4及左前定距螺旋桨1、右前定距螺旋桨2的反扭矩和不变,操纵前俯时航向保持稳定;减少左后定距螺旋桨3、右后定距螺旋桨4的转速,左后定距螺旋桨3、右后定距螺旋桨4的升力减少,同时,增大左前定距螺旋桨1、右前定距螺旋桨2的转速,左前定距螺旋桨1、右前定距螺旋桨2的升力增大,使机身后仰,在操纵后仰的过程中,左后定距螺旋桨3、右后定距螺旋桨4的转速减少,升力减少,反扭矩减少,左前定距螺旋桨1、右前定距螺旋桨2的转速增大,升力增大,反扭增大,左后定距螺旋桨3、右后定距螺旋桨4及左前定距螺旋桨1、右前定距螺旋桨2的反扭矩和不变,操纵后仰时航向保持稳定,实现俯仰操纵。
[0119]
当多边形螺旋桨直升机在空中时,操纵中心螺旋桨的桨距控制器25加大中心螺旋桨5的桨距,中心螺旋桨5的升力增大,反扭矩增大,同时,相同减少左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的转速,左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的升力减少,反扭矩减少,中心螺旋桨5的反扭矩大于左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的反扭矩之和,由于中心螺旋桨5逆时针转n,参见图6,反扭矩使多边形螺旋桨直升机顺时针转s,即向右旋转方向,在操纵向右旋转方向的过程中,中心螺旋桨5的桨距增大,升力增大,左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的转速减少,升力减少,总升力不变,多边形螺旋桨直升机保持垂直方向的稳定;操纵中心螺旋桨的桨距控制器25减少中心螺旋桨5的桨距,中心螺旋桨5的升力减少,反扭矩减少,同时,相同增大左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的转速,左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的升力增大,反扭矩增大,中心螺旋桨5的反扭矩小于左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的反扭矩之和,由于左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2顺时针转s,参见图6,反扭矩使多边形螺旋桨直升机逆时针转n,即向左旋转方向,在操纵向左旋转方向的过程中,中心螺旋桨5的桨距减少,升力减少,左后定距螺旋桨3、右后定距螺旋桨4、左前定距螺旋桨1及右前定距螺旋桨2的转速增大,升力增大,总升力不变,多边形螺旋桨直升机保持垂直方向的稳定,实现航向操纵。
[0120]
图7所示实施例中,机身10顶部重心p的上边设置采用变距螺旋桨的中心螺旋桨5,中心螺旋桨5的旋转面水平,中心螺旋桨的旋转中心x5和多边形螺旋桨直升机的重心p在水平面的投影重叠,参见图8,以中心螺旋的旋转中心x5为水平正五边形的中心作一个水平的正五边形d5,中心螺旋桨的旋转中心x5、多边形螺旋桨直升机的重心p和水平正五边形d5的中心d5x在水平面的投影重叠。
[0121]
设置五个相同的定距螺旋桨在该水平正五边形d5的五个顶角上,每个定距螺旋桨的旋转中心在各自的顶角上,机身10的左前方设置一个左前定距螺旋桨1,左后方设置一个左后定距螺旋桨3;对称地,机身10的右前方设置一个右前定距螺旋桨2,右后方设置一个右后定距螺旋桨4,机身10的尾部设置一个尾定距螺旋桨6,在该水平正五边形d5顶角上左边的定距螺旋桨与右边的定距螺旋桨对称于机身纵轴x,该水平正五边形d5顶角到中心d5x的距离大于中心螺旋桨5的半径与水平正五边形d5顶角上的单个定距螺旋桨的半径之和,使全部螺旋桨的旋转面相互不重叠。
[0122]
机身10左边靠前设置一条前掠的左前臂11,支撑左前定距螺旋桨1,机身10左边靠后设置一条后掠的左后臂13,支撑左后定距螺旋桨3,对称地,机身10右边靠前设置一条前掠的右前臂12,支撑右前定距螺旋桨2,机身10右边靠后设置一条后掠的右后臂14,支撑右后定距螺旋桨4,机身尾部15支撑尾定距螺旋桨6。
[0123]
5个相同的定距螺旋桨的旋转面水平设置。
[0124]
尾定距螺旋桨6的旋转面的高度比左后定距螺旋桨3和右后定距螺旋桨4的旋转面的高度高,左后定距螺旋桨3和右后定距螺旋桨4的旋转面的高度相同,比中心螺旋桨5的旋转面的高度高;左前定距螺旋桨1和右前定距螺旋桨2的旋转面的高度相同,比中心螺旋桨5的旋转面的高度低。
[0125]
左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4和尾定距螺旋桨6是完全相同的定距螺旋桨,中心螺旋桨5是与左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4和尾定距螺旋桨6不同的变距螺旋桨,设置桨距控制器25操纵中心螺旋桨5的桨距变化。
[0126]
设置水平正五边形d5顶角上的左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4和尾定距螺旋桨6顺时针转,参见图8,设置中心螺旋桨5逆时针转。
[0127]
设置五个相同的发动机分别驱动左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4和尾定距螺旋桨6,设置另一个发动机驱动中心螺旋桨5,驱动中心螺旋桨5的发动机的功率大于或等于驱动水平正五边形d5顶角上的定距螺旋桨的发动机的功率的总和。
[0128]
机身10下靠近重心附近设置起落架30。
[0129]
这种中心螺旋桨5是变距螺旋桨,五个定距螺旋桨分别设置在水平正五边形d5的五个顶角上的多边形螺旋桨直升机的飞行原理是:在左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、尾定距螺旋桨6和中心螺旋桨5转动时,当左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4及尾定距螺旋桨6的反扭矩之和等于中心螺旋桨5的反扭矩,而方向相反,左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4及尾定距螺旋桨6和中心螺旋桨5的反扭矩相互抵消,多边形螺旋桨直升机保持航向稳定。
[0130]
加大六个发动机的油门,使左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、尾定距螺旋桨6和中心螺旋桨5的转速增加,同时操纵桨距控制器25使中心螺旋桨5的桨距跟随油门的增加而增加,六个螺旋桨的升力加大,当总升力大于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机垂直上升。
[0131]
减少六个发动机的油门,使左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、尾定距螺旋桨6和中心螺旋桨5的转速减少,同时操纵桨距控制器25使中心螺旋桨5的桨距跟随油门的减少而减少,六个螺旋桨的升力减少,当总升力等于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机悬停。
[0132]
继续减少六个发动机的油门,使左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、尾定距螺旋桨6和中心螺旋桨5的转速减少,同时操纵桨距控制器25使中心螺旋桨5的桨距跟随油门的减少而减少,六个螺旋桨的升力减少,当总升力小于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机垂直下降。
[0133]
当多边形螺旋桨直升机在空中时,加大左前定距螺旋桨1、左后定距螺旋桨3的转速,左前定距螺旋桨1、左后定距螺旋桨3的升力增大,同时,减少右前定距螺旋桨2、右后定距螺旋桨4的转速,右前定距螺旋桨2、右后定距螺旋桨4的升力减少,使机身10向右横滚,在操纵向右横滚的过程中,左前定距螺旋桨1、左后定距螺旋桨3的转速增大,升力增大,反扭矩增大,右前定距螺旋桨2、右后定距螺旋桨4的转速减少,升力减少,反扭矩减少,左前定距螺旋桨1、左后定距螺旋桨3和右前定距螺旋桨2、右后定距螺旋桨4的反扭矩和不变,操纵向右横滚时航向保持稳定;减少左前定距螺旋桨1、左后定距螺旋桨3的转速,左前定距螺旋桨1、左后定距螺旋桨3的升力减少,同时,增大右前定距螺旋桨2,右后定距螺旋桨4的转速,右前定距螺旋桨2、右后定距螺旋桨4的升力增大,使机身10向左横滚,在操纵向左横滚的过程中,左前定距螺旋桨1、左后定距螺旋桨3的转速减少,升力减少,反扭矩减少,右前定距螺旋桨2、右后定距螺旋桨4的转速增大,升力增大,反扭矩增大,左前定距螺旋桨1、左后定距螺旋桨3和右前定距螺旋桨2、右后定距螺旋桨4的反扭矩和不变,操纵向左横滚时航向保持稳定,实现横滚操纵。
[0134]
当多边形螺旋桨直升机在空中时,加大左后定距螺旋桨3、右后定距螺旋桨4的转速,左后定距螺旋桨3、右后定距螺旋桨4的升力增大,同时,减少左前定距螺旋桨1、右前定距螺旋桨2的转速,左前定距螺旋桨1、右前定距螺旋桨2的升力减少,使机身前俯,在操纵前俯的过程中,左后定距螺旋桨3、右后定距螺旋桨4的转速增大,升力增大,反扭矩增大,左前定距螺旋桨1、右前定距螺旋桨2的转速减少,升力减少,反扭减少,左后定距螺旋桨3、右后定距螺旋桨4及左前定距螺旋桨1、右前定距螺旋桨2的反扭矩和不变,操纵前俯时航向保持稳定;减少左后定距螺旋桨3、右后定距螺旋桨4的转速,左后定距螺旋桨3、右后定距螺旋桨4的升力减少,同时,增大左前定距螺旋桨1、右前定距螺旋桨2的转速,左前定距螺旋桨1、右前定距螺旋桨2的升力增大,使机身后仰,在操纵后仰的过程中,左后定距螺旋桨3、右后定距螺旋桨4的转速减少,升力减少,反扭矩减少,左前定距螺旋桨1、右前定距螺旋桨2的转速增大,升力增大,反扭增大,左后定距螺旋桨3、右后定距螺旋桨4及左前定距螺旋桨1、右前定距螺旋桨2的反扭矩和不变,操纵后仰时航向保持稳定,实现俯仰操纵。
[0135]
当多边形螺旋桨直升机在空中时,操纵中心螺旋桨的桨距控制器25加大中心螺旋桨5的桨距,中心螺旋桨5的升力增大,反扭矩增大,同时,相同减少左前定距螺旋桨1、右前
定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、尾定距螺旋桨6的转速,左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、尾定距螺旋桨6的升力减少,反扭矩减少,中心螺旋桨5的反扭矩大于左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、尾定距螺旋桨6的反扭矩之和,由于中心螺旋桨5逆时针转n,参见图8,反扭矩使多边形螺旋桨直升机顺时针转s,即向右旋转方向,在操纵向右旋转方向的过程中,中心螺旋桨5的桨距增大,升力增大,左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、尾定距螺旋桨6的转速减少,升力减少,总升力不变,多边形螺旋桨直升机保持垂直方向的稳定;操纵中心螺旋桨的桨距控制器25减少中心螺旋桨5的桨距,中心螺旋桨5的升力减少,反扭矩减少,同时,相同增大左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、尾定距螺旋桨6的转速,左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、尾定距螺旋桨6的升力增大,反扭矩增大,中心螺旋桨5的反扭矩小于左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、尾定距螺旋桨6的反扭矩之和,由于左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、尾定距螺旋桨6顺时针转s,参见图8,反扭矩使多边形螺旋桨直升机逆时针转n,即向左旋转方向,在操纵向左旋转方向的过程中,中心螺旋桨5的桨距减少,升力减少,左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、尾定距螺旋桨6的转速增大,升力增大,总升力不变,多边形螺旋桨直升机保持垂直方向的稳定,实现航向操纵。
[0136]
图9所示实施例中,机身10顶部重心p的上边设置采用变距螺旋桨的中心螺旋桨5,中心螺旋桨5的旋转面水平,中心螺旋桨的旋转中心x5和多边形螺旋桨直升机的重心p在水平面的投影重叠,参见图10,以中心螺旋的旋转中心x5为水平正六边形的中心作一个水平的正六边形d6,中心螺旋桨的旋转中心x5、多边形螺旋桨直升机的重心p和水平正六边形d6的中心d6x在水平面的投影重叠。
[0137]
设置六个相同的定距螺旋桨在该水平正六边形d6的六个顶角上,每个定距螺旋桨的旋转中心在各自的顶角上,机身10的左前方设置一个左前定距螺旋桨1,左后方设置一个左后定距螺旋桨3,机身10中部重心p左边设置一个左边定距螺旋桨7;对称地,机身10的右前方设置一个右前定距螺旋桨2,右后方设置一个右后定距螺旋桨4,机身10中部重心p右边设置一个右边定距螺旋桨8,在该水平正六边形d6顶角上左边的定距螺旋桨与右边的定距螺旋桨对称于机身纵轴x,该水平正六边形d6顶角到中心d6x的距离大于中心螺旋桨5的半径与水平正六边形d5顶角上的单个定距螺旋桨的半径之和,使全部螺旋桨的旋转面相互不重叠。
[0138]
机身10左边靠前设置一条前掠的左前臂11,支撑左前定距螺旋桨1,机身10左边靠后设置一条后掠的左后臂13,支撑左后定距螺旋桨3,机身10中部重心p左边,设置一条左臂17,支撑左边定距螺旋桨7;对称地,机身10右边靠前设置一条前掠的右前臂12,支撑右前定距螺旋桨2,机身10右边靠后设置一条后掠的右后臂14,支撑右后定距螺旋桨4,机身10中部重心p右边,设置一条右臂18,支撑右边定距螺旋桨8。
[0139]
6个相同的定距螺旋桨的旋转面水平设置。
[0140]
左后定距螺旋桨3和右后定距螺旋桨4的旋转面的高度相同,比中心螺旋桨5的旋转面的高度高,左边定距螺旋桨7、右边定距螺旋桨8和中心螺旋桨5的旋转面的高度相同;
左前定距螺旋桨1和右前定距螺旋桨2的旋转面的高度相同,比中心螺旋桨5的旋转面的高度低。
[0141]
左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、左边定距螺旋桨7、右边定距螺旋桨8是完全相同的定距螺旋桨,中心螺旋桨5是与左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、左边定距螺旋桨7、右边定距螺旋桨8不同的变距螺旋桨,设置桨距控制器25操纵中心螺旋桨5的桨距变化。
[0142]
设置水平正六边形d6顶角上的左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、左边定距螺旋桨7、右边定距螺旋桨8顺时针转,参见图10,设置中心螺旋桨5逆时针转。
[0143]
设置六个相同的发动机分别驱动左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、左边定距螺旋桨7、右边定距螺旋桨8,设置另一个发动机驱动中心螺旋桨5,驱动中心螺旋桨5的发动机的功率大于或等于驱动水平正六边形d6顶角上的定距螺旋桨的发动机的功率的总和。
[0144]
机身10下靠近重心p附近设置起落架30。
[0145]
这种中心螺旋桨5是变距螺旋桨,六个定距螺旋桨分别设置在水平正六边形d6的六个顶角上的多边形螺旋桨直升机的飞行原理是:在左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、左边定距螺旋桨7、右边定距螺旋桨8和中心螺旋桨5转动时,当左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、左边定距螺旋桨7、右边定距螺旋桨8的反扭矩之和等于中心螺旋桨5的反扭矩,而方向相反,左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、左边定距螺旋桨7、右边定距螺旋桨8和中心螺旋桨5的反扭矩相互抵消,多边形螺旋桨直升机保持航向稳定。
[0146]
加大七个发动机的油门,使左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、左边定距螺旋桨7、右边定距螺旋桨8和中心螺旋桨5的转速增加,同时操纵桨距控制器25使中心螺旋桨5的桨距跟随油门的增加而增加,七个螺旋桨的升力加大,当总升力大于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机垂直上升。
[0147]
减少七个发动机的油门,使左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、左边定距螺旋桨7、右边定距螺旋桨8和中心螺旋桨5的转速减少,同时操纵桨距控制器25使中心螺旋桨5的桨距跟随油门的减少而减少,七个螺旋桨的升力减少,当总升力等于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机悬停。
[0148]
继续减少七个发动机的油门,使左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、左边定距螺旋桨7、右边定距螺旋桨8和中心螺旋桨5的转速减少,同时操纵桨距控制器25使中心螺旋桨5的桨距跟随油门的减少而减少,七个螺旋桨的升力减少,当总升力小于多边形螺旋桨直升机的重量时,多边形螺旋桨直升机垂直下降。
[0149]
当多边形螺旋桨直升机在空中时,加大左前定距螺旋桨1、左后定距螺旋桨3的转速,左前定距螺旋桨1、左后定距螺旋桨3的升力增大,同时,减少右前定距螺旋桨2、右后定距螺旋桨4的转速,右前定距螺旋桨2、右后定距螺旋桨4的升力减少,使机身10向右横滚,在操纵向右横滚的过程中,左前定距螺旋桨1、左后定距螺旋桨3的转速增大,升力增大,反扭矩增大,右前定距螺旋桨2、右后定距螺旋桨4的转速减少,升力减少,反扭矩减少,左前定距
螺旋桨1、左后定距螺旋桨3和右前定距螺旋桨2、右后定距螺旋桨4的反扭矩和不变,操纵向右横滚时航向保持稳定;减少左前定距螺旋桨1、左后定距螺旋桨3的转速,左前定距螺旋桨1、左后定距螺旋桨3的升力减少,同时,增大右前定距螺旋桨2,右后定距螺旋桨4的转速,右前定距螺旋桨2、右后定距螺旋桨4的升力增大,使机身10向左横滚,在操纵向左横滚的过程中,左前定距螺旋桨1、左后定距螺旋桨3的转速减少,升力减少,反扭矩减少,右前定距螺旋桨2、右后定距螺旋桨4的转速增大,升力增大,反扭矩增大,左前定距螺旋桨1、左后定距螺旋桨3和右前定距螺旋桨2、右后定距螺旋桨4的反扭矩和不变,操纵向左横滚时航向保持稳定,实现横滚操纵。
[0150]
当多边形螺旋桨直升机在空中时,加大左后定距螺旋桨3、右后定距螺旋桨4的转速,左后定距螺旋桨3、右后定距螺旋桨4的升力增大,同时,减少左前定距螺旋桨1、右前定距螺旋桨2的转速,左前定距螺旋桨1、右前定距螺旋桨2的升力减少,使机身前俯,在操纵前俯的过程中,左后定距螺旋桨3、右后定距螺旋桨4的转速增大,升力增大,反扭矩增大,左前定距螺旋桨1、右前定距螺旋桨2的转速减少,升力减少,反扭减少,左后定距螺旋桨3、右后定距螺旋桨4及左前定距螺旋桨1、右前定距螺旋桨2的反扭矩和不变,操纵前俯时航向保持稳定;减少左后定距螺旋桨3、右后定距螺旋桨4的转速,左后定距螺旋桨3、右后定距螺旋桨4的升力减少,同时,增大左前定距螺旋桨1、右前定距螺旋桨2的转速,左前定距螺旋桨1、右前定距螺旋桨2的升力增大,使机身后仰,在操纵后仰的过程中,左后定距螺旋桨3、右后定距螺旋桨4的转速减少,升力减少,反扭矩减少,左前定距螺旋桨1、右前定距螺旋桨2的转速增大,升力增大,反扭增大,左后定距螺旋桨3、右后定距螺旋桨4及左前定距螺旋桨1、右前定距螺旋桨2的反扭矩和不变,操纵后仰时航向保持稳定,实现俯仰操纵。
[0151]
当多边形螺旋桨直升机在空中时,操纵中心螺旋桨的桨距控制器25加大中心螺旋桨5的桨距,中心螺旋桨5的升力增大,反扭矩增大,同时,相同减少左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、左边定距螺旋桨7、右边定距螺旋桨8的转速,左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、左边定距螺旋桨7、右边定距螺旋桨8的升力减少,反扭矩减少,中心螺旋桨5的反扭矩大于左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、左边定距螺旋桨7、右边定距螺旋桨8的反扭矩之和,由于中心螺旋桨5逆时针转n,参见图10,反扭矩使多边形螺旋桨直升机顺时针转s,即向右旋转方向,在操纵向右旋转方向的过程中,中心螺旋桨5的桨距增大,升力增大,左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、左边定距螺旋桨7、右边定距螺旋桨8的转速减少,升力减少,总升力不变,多边形螺旋桨直升机保持垂直方向的稳定;操纵中心螺旋桨的桨距控制器25减少中心螺旋桨5的桨距,中心螺旋桨5的升力减少,反扭矩减少,同时,相同增大左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、左边定距螺旋桨7、右边定距螺旋桨8的转速,左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、左边定距螺旋桨7、右边定距螺旋桨8的升力增大,反扭矩增大,中心螺旋桨5的反扭矩小于左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、左边定距螺旋桨7、右边定距螺旋桨8的反扭矩之和,由于左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、左边定距螺旋桨7、右边定距螺旋桨8顺时针转s,参见图10,反扭矩使多边形螺旋桨直升机逆时针转n,即向左旋转方向,在操纵向左旋转方向的过程中,中心螺旋桨5的桨距减
少,升力减少,左前定距螺旋桨1、右前定距螺旋桨2、左后定距螺旋桨3、右后定距螺旋桨4、左边定距螺旋桨7、右边定距螺旋桨8的转速增大,升力增大,总升力不变,多边形螺旋桨直升机保持垂直方向的稳定,实现航向操纵。
[0152]
图11是本发明第一个实施例图1的斜视图,作为说明书摘要附图。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips