
 商标分类
商标分类  商标转让
商标转让 
自动平衡运输装置的制作方法
 2021-02-07 16:02:22|
2021-02-07 16:02:22| 283|
283| 起点商标网
起点商标网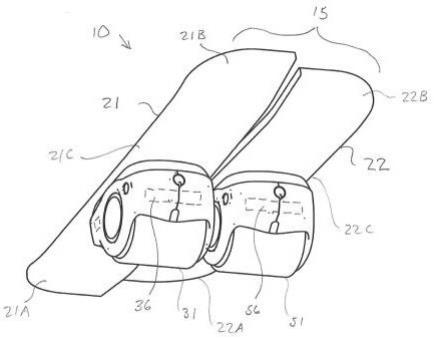
[0001]
本实用新型是关于个人运输的装置,特别是指提供滑板式的骑行(即向前一只脚)和更灵敏的转弯的运输装置。
背景技术:
[0002]
现有技术包括几个自动平衡运输装置。这些包括由kamen等人开发并在美国专利no. 6,302,230(尤其是),由chen(美国专利号8,807,250)所制的solowheel和也由chen(美国专利号8,738,278)所制的hovertrax。现有技术还包括在美国专利申请no. 15 / 338,387。这三项专利和hovershoe申请通过引用整体并入本文,如同在此全文披露一样。
[0003]
上述专利公开了通常骑乘者朝前站立,臀部朝行进方向线骑乘的装置。然而,在传统的滑板中,骑手侧身站立。对于小时候经历过滑板骑行的人来说,学会侧身站立而不是向前髋部站立更容易。
[0004]
美国专利号授予多尔克森(doerksen)的“自稳定滑板”的第9,101,817号专利公开了一种自动平衡装置,可以在侧身站立时骑行。该装置(和其他类似装置)在几个方面是不利的。一是转弯困难。有一个奇特的宽而扁平的车轮,这种车轮结构使转弯非常缓慢或缓慢。其他不利方面包括裸露的车轮很危险,会洒下雨水并限制脚运动。
[0005]
因此,需要一种自动平衡的运输装置,该装置允许骑乘者侧身站立,同时提供更锐利和更灵敏的转弯。
技术实现要素:
[0006]
本实用新型的目的在于针对上述现有技术的缺陷和不足,为人们提供一种可提供滑板式的骑行(即向前一只脚)和更灵敏的转弯的运输装置。
[0007]
为实现上述目的本实用新型所采取的技术方案是:该自动平衡运输装置,包括:
[0008]
一个平台,具有第一和第二前子部分以及第一和第二后子部分,以及连接到第一前子部分和后子部分之间的第一连接构件,以及连接到第二前子部分和后子部分之间的第二连接构件;
[0009]
第一轮,第一驱动马达以及与第一连接构件相关的第一传感器;
[0010]
第二轮,第二驱动马达以及与第二连接构件相关的第二传感器;
[0011]
控制电路,其基于来自第一传感器的数据驱动第一驱动马达使第一连接构件自动平衡,并基于来自第二传感器的数据驱动第二驱动马达使第二连接构件自动平衡;和
[0012]
第一和第二连接构件的前后倾斜角在使用过程中可由骑乘者改变,并且第一和第二连接构件之间的前后倾斜角之差实现了装置的第一和第二车轮的差动驱动以及转向。
[0013]
所述平台的纵向尺寸是横向尺寸的1.5倍或更大。
[0014]
所述第一轮和第二轮完全在所述平台下方。
[0015]
所述第一轮和第二轮部分在所述平台下方,并且部分在所述平台上方。
[0016]
所述传感器能够感测前后倾斜角。
[0017]
所述第一连接构件和第二连接构件彼此相邻定位并且在物理上是分开的。
[0018]
所述第一连接构件和第二连接构件通过柔性联接器彼此联接。
[0019]
所述第一连接构件和第二连接构件形成在其中具有纵向布置的开口的连续板中,所述板具有足够的柔性以允许所述第一连接构件和第二连接构件相对于彼此前后倾。
[0020]
所述第一前子部分和所述第二前子部分被配置为在前后倾斜角度中相对于彼此移动,并且所述第一前子部分和第二前子部分相对于彼此在前后倾斜角度中的移动导致第一和第二连接构件相对于彼此的运动。
[0021]
所述第一后部分和第二后部分被配置为在前后倾斜角度中相对于彼此移动,并且所述第一后部分和第二后部分相对于彼此的前后倾斜角度中的移动导致第一和第二连接构件相对于彼此的运动。
[0022]
本实用新型的另一个目的是提供一种具有两个平台部分或组件的装置,所述两个平台部分或组件可相对移动,并且每个平台部分或组件控制驱动轮,车轮的差动驱动实现转向。
[0023]
本实用新型的这些和相关目的通过使用自动平衡装置来实现,该自动平衡装置具有如本文所述的纵向布置的可移动平台部分。
[0024]
在结合附图阅读以下对本实用新型的以下更详细的描述之后,对本领域技术人员而言,本实用新型的前述以及相关的优点和特征的实现应该是更容易明白的。
附图说明
[0025]
图1是根据本实用新型的运输装置的一个实施例的底部透视图。
[0026]
图2是根据本实用新型的运输装置的一个实施例的顶部透视图。
[0027]
图3-4是根据本实用新型的具有纵向布置的平台的自动平衡装置的第二实施例图。
[0028]
图5-6是根据本实用新型的具有纵向布置的平台的自动平衡装置的第三实施例图。
[0029]
图7是根据本实用新型的自动平衡装置的第四实施例的透视图,其中驱动轮延伸穿过平台。
具体实施方式
[0030]
参考图1和图2,分别示出了根据本实用新型的运输装置10的第一实施例的底部和顶部透视图。
[0031]
装置10优选地包括纵向布置的脚平台15,该脚平台15具有两个脚平台部分21,22,一个位于平台的每个侧面上。每个平台部分的下方是一个30,50的自动平衡脚平台单元或模块(以下简称
“ꢀ
fpu”)。在图1中,平台部分21耦合到fpu 30,平台部分22耦合到fpu 50。
[0032]
每个fpu最好具有一个驱动轮31,51和一个相关的电动机32,52。马达可以是轮毂马达或其他马达装置。每个fpu最好还具有控制电路34,54,位置传感器(例如前后倾斜角传感器或陀螺仪传感器或其他传感器)35,55,以及电池36,56。可替代地,给定fpu的传感器可以设置有相关的平台部分。无论如何,传感器优选地被配置为感测其脚平台部分的前后倾斜角。
[0033]
fpu 30,50优选地被配置成使得控制电路基于来自传感器35,55的数据驱动驱动轮31,51朝向fpu自动平衡。自动平衡装置,包括在fpu中使用的自动平衡装置,在本领域中是已知的。
[0034]
fpu 30,50优选地耦合到尽管驱动轮可以在不背离本实用新型的前提下被布置成彼此相反,使得驱动轮具有共同的旋转轴线。
[0035]
脚平台部分21,22每个都具有前端a,后端b和在它们之间的连接构件c。端部可称为子部分,例如前部为21a,22a,后部为21b,22b,连接构件为21c,22c。如图6所示,骑手通常会用一只脚站立在子部分21a,22a上,而另一只手则在子部分21b,22b上。通过将重量从脚后跟转向脚上的球,反之亦然,骑手可以改变连接构件21c,22c相对于彼此的倾斜度,从而实现转弯。
[0036]
例如,如果在图2中,连接部件22c向前倾斜1度,而连接部件21c向前倾斜5度,则连接部件之间的差值为4度,并且驱动轮31的速度比轮51的驱动速度快,向右转动设备10。
[0037]
应当认识到,哪个纵向末端是前部或后部可以是任意的,因为骑乘者可以从任一方向安装(尽管该装置可以具有专用的前部和后部)。
[0038]
注意,连接构件21c,22c的相等且相反的倾斜将允许装置枢转就位,这是现有技术的自动平衡滑板装置无法实现的。
[0039]
通过提供独立的或基于相对差的两个驱动轮的控制,本实用新型能够实现比现有技术的装置更灵敏的转向。此外,它以对骑手直观的方式实现,使学习骑行变得更容易,并增加了该设备的潜在用途-通勤,娱乐,游戏和比赛等。
[0040]
还应该认识到,在本实用新型中,平台的纵向尺寸大于横向尺寸。它可能只是比宽度长,或者比宽度长1.5倍,或者比宽度长2倍,或者比宽度长2.5倍,甚至更多。
[0041]
参考图3-4,示出了根据本实用新型的具有纵向布置的平台115的自动平衡装置110的第二实施例。
[0042]
设备110类似于设备10,并且相似的组件可以在十位数和个位数中具有相同的附图标记。一个区别是,虽然设备10的平台15是两个物理上分离的项目,即不直接连接,但平台115的两个平台部分121,122通过柔性膜140耦合。该膜优选以这种方式耦合到平台部分。这样一种方式既可以提供一个连续平台表面的感觉,又可以提供足够的柔韧性,使得平台部分可以相对于彼此前后倾斜。膜可以由乳胶橡胶或柔性塑料或其他合适的材料制成。
[0043]
类似于装置10,每个平台部分121,122具有前子部分121a,122a,后子部分121b,122b以及在它们之间的连接构件121c,122c。
[0044]
图4示出了设备110的一种潜在的组装技术。箭头a指示了被安装到fpu 130,150的平台。平台120可以拧到fpu上或以其他方式固定。用于联接fpu的联接技术在本领域中是已知的。
[0045]
参照图5和图6,示出了根据本实用新型的具有纵向布置的平台215的自动平衡装置210的第三实施例。
[0046]
装置210包括连续的或一体的平台220,尽管优选地在其中具有纵向设置的孔271以增强扭曲。平台215优选地在前面具有子部分221a,222a,在后面具有子部分221b,222b,以及在它们之间的连接构件221c,222c。
[0047]
图6示出了骑手可能站立的地方。例如,一只脚5在前面,另一只脚6在后面。可以看
出,每只脚都接触到一对子区域。当骑乘者向前或向后倾斜(沿行进方向)时,设备将朝该方向前进,但是,当骑乘者纵向扭转平台时,连接构件221c,222c将经历不同的前后倾斜角度,从而导致设备转动。
[0048]
参照图7,示出了根据本实用新型的具有纵向布置的平台的自动平衡装置310的第四实施例的透视图。设备310包括其中具有孔的柔性平台315。中心孔371容纳两个在平台顶部表面上方延伸的驱动轮330,350。在纵向端部(在子部分321a,322a,321b,322b处)设有孔372,以利于扭转。
[0049]
装置310的操作类似于装置210。站立的滑板手向前或向后倾斜以开始运动,并通过交替地向他或她的脚的球和脚后跟施加重量来扭转板子。这种扭曲导致连接部件321c,322c具有不同的前后倾斜角度,如传感器检测到的那样分别通过335,355来实现设备的转动。
[0050]
尽管已经结合本实用新型的特定实施例对本实用新型进行了描述,但是应当理解,本实用新型能够进行进一步的修改,并且本申请旨在覆盖通常遵循本实用新型的原理的本实用新型的任何变型,用途或修改。本实用新型包括在本实用新型所属领域的已知或惯常实践之内并且可以应用于上文阐述的基本特征的,与本公开内容的背离,并且落入本实用新型的范围和限制内所附权利要求书。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 倾斜角

 热门咨询
热门咨询




tips