
 商标分类
商标分类  商标转让
商标转让 
一种基于EPS和EHPS的转向系统及其控制方法与流程
 2021-02-07 15:02:27|
2021-02-07 15:02:27| 382|
382| 起点商标网
起点商标网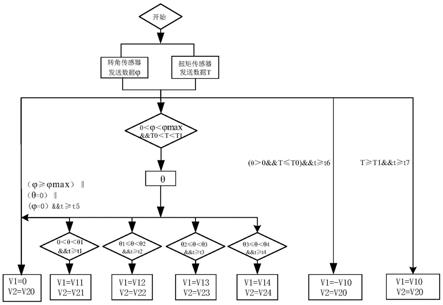
一种基于eps和ehps的转向系统及其控制方法
技术领域
[0001]
本发明涉及一种基于eps和ehps的转向系统及其控制方法。
背景技术:
[0002]
目前大多数乘用车基本都采用电动助力转向系统(eps),电动商用车基本都采用电动液压助力转向系统(ehps),即采用转向电机和控制器驱动转向油泵(简称转向油泵),通过转向油泵提供的液压能直接对整车进行助力转向。而且,越来越多的车辆采用eps+ehps组合系统,为整车提供助力转向,比如授权公告号为cn204472878u的中国专利文件中公开了一种混合驱动的动力转向系统,包括电动助力转向机构和电动液压助力转向机构,电动助力转向机构包括电动助力转向电机,电动液压助力转向机构包括电动液压助力转向电机和转向油泵,电动助力转向电机通过传动轴与转向盘(方向盘)的转向管柱连接,电动液压助力转向电机与转向油泵机械连接,转向油泵通过油路与转向器进行连接。该动力转向系统的工作过程为:整车不打方向盘时,电动助力转向电机和电动液压助力转向电机都不工作;当打方向时,电动助力转向机构工作,同时传送工作信号给电动液压助力转向机构,使电动液压助力转向机构工作,助力转向由电动助力转向机构和电动液压助力转向机构合力共同提供。上述工作方法具有局限性,可以应用到一些对转向敏感性要求较低的车辆中或者载荷较轻的车辆,因为不打方向盘时电动助力转向电机和电动液压助力转向电机不工作,如果突然打方向盘,电动助力转向电机和电动液压助力转向电机才工作,方向盘有迟滞,反应迟钝,不满足驾驶员对转向敏感的要求。而且,当打方向时,上述只是说明了电动助力转向机构和电动液压助力转向机构同时运行,实现助力转向,但是,并没有根据具体的转向需求进行合适的控制,那么,就有可能出现转向需求与助力转向不匹配,造成转向感受过于轻盈或者过于沉重的情况,影响操纵舒适性以及控制可靠稳定性,甚至有可能引发交通事故。
技术实现要素:
[0003]
本发明的目的是提供一种基于eps和ehps的转向系统的控制方法,用以解决现有的包括电动助力转向机构和电动液压转向助力机构的转向系统的助力转向控制方法的可靠性不佳的问题。本发明的目的是提供一种基于eps和ehps的转向系统,用以解决现有的包括电动助力转向机构和电动液压助力转向机构的转向系统的可靠性不佳和操纵舒适性差的问题。
[0004]
为实现上述目的,本发明的方案包括一种基于eps和ehps的转向系统的控制方法,包括以下步骤:
[0005]
检测方向盘的转向角度以及转向管柱的扭矩;
[0006]
当转向角度以及扭矩均处于正常范围内时,检测方向盘的实际转向角速度,根据转向角速度、电动助力转向电机的目标转速和电动液压助力转向电机的目标转速之间的对应关系得到与所述实际转向角速度对应的电动助力转向电机的目标转速和电动液压助力
转向电机的目标转速;其中,所述方向盘的转向角度的正常范围是指大于0且小于方向盘最大允许转向角度的范围区间,所述转向管柱的扭矩的正常范围是指所需最小转向扭矩设定值与所需最大转向扭矩设定值之间的范围区间;
[0007]
根据得到的电动助力转向电机的目标转速和电动液压助力转向电机的目标转速控制电动助力转向电机和电动液压助力转向电机。
[0008]
根据转向角速度、电动助力转向电机的目标转速和电动液压助力转向电机的目标转速之间的对应关系得到与检测得到的实际转向角速度对应的电动助力转向电机的目标转速和电动液压助力转向电机的目标转速,根据得到的电动助力转向电机的目标转速和电动液压助力转向电机的目标转速控制电动助力转向电机和电动液压助力转向电机,进行助力转向控制。该控制方法能够实现基于eps和ehps的转向系统的可靠助力转向控制,根据具体的转向需求进行合适的控制,实现转向需求与助力转向之间的匹配,避免转向感受过于轻盈或者过于沉重,提升操纵舒适性以及控制可靠稳定性,进而降低交通事故的发生概率。而且,还能够避免助力转向迟滞,降低了无效工作强度,有效降低转向功耗,还能够在一定程度上降低工作噪声,提升了驾驶和乘坐的舒适性,延长了转向相关零部件的使用寿命。
[0009]
进一步地,为了提高助力转向控制可靠性,当方向盘的转向角度大于或者等于所述方向盘最大允许转向角度,或者方向盘的实际转向角速度为零,或者方向盘的转向角度等于零时,控制电动助力转向电机的目标转速为零,电动液压助力转向电机的目标转速为设定的第一低转速阈值。
[0010]
进一步地,为了提高助力转向控制可靠性,当方向盘的实际转向角速度的绝对值大于零,且转向管柱的扭矩小于或者等于所述所需最小转向扭矩设定值时,控制电动助力转向电机的目标转速为设定的回正转速阈值,电动液压助力转向电机的目标转速为设定的第一低转速阈值。
[0011]
进一步地,为了提高助力转向控制可靠性,当转向管柱的扭矩大于或者等于所述所需最大转向扭矩设定值时,控制电动液压助力转向电机的目标转速为设定的第一低转速阈值,电动助力转向电机的目标转速为设定的第二低转速阈值。
[0012]
本发明还提供一种基于eps和ehps的转向系统,包括转向系统本体以及控制装置,所述控制装置包括存储器、处理器以及存储在所述存储器中并可在处理器上运行的计算机程序,所述处理器在执行所述计算机程序时实现的控制过程包括:
[0013]
检测方向盘的转向角度以及转向管柱的扭矩;
[0014]
当转向角度以及扭矩均处于正常范围内时,检测方向盘的实际转向角速度,根据转向角速度、电动助力转向电机的目标转速和电动液压助力转向电机的目标转速之间的对应关系得到与所述实际转向角速度对应的电动助力转向电机的目标转速和电动液压助力转向电机的目标转速;其中,所述方向盘的转向角度的正常范围是指大于0且小于方向盘最大允许转向角度的范围区间,所述转向管柱的扭矩的正常范围是指所需最小转向扭矩设定值与所需最大转向扭矩设定值之间的范围区间;
[0015]
根据得到的电动助力转向电机的目标转速和电动液压助力转向电机的目标转速控制电动助力转向电机和电动液压助力转向电机。
[0016]
根据转向角速度、电动助力转向电机的目标转速和电动液压助力转向电机的目标转速之间的对应关系得到与检测得到的实际转向角速度对应的电动助力转向电机的目标
转速和电动液压助力转向电机的目标转速,根据得到的电动助力转向电机的目标转速和电动液压助力转向电机的目标转速控制电动助力转向电机和电动液压助力转向电机,进行助力转向控制。该基于eps和ehps的转向系统能够实现可靠助力转向控制,根据具体的转向需求进行合适的控制,实现转向需求与助力转向之间的匹配,避免转向感受过于轻盈或者过于沉重,提升操纵舒适性以及控制可靠稳定性,进而降低交通事故的发生概率。而且,还能够避免助力转向迟滞,降低了无效工作强度,有效降低转向功耗,还能够在一定程度上降低工作噪声,提升了驾驶和乘坐的舒适性,延长了转向相关零部件的使用寿命。
[0017]
进一步地,为了提高助力转向控制可靠性,当方向盘的转向角度大于或者等于所述方向盘最大允许转向角度,或者方向盘的实际转向角速度为零,或者方向盘的转向角度等于零时,控制电动助力转向电机的目标转速为零,电动液压助力转向电机的目标转速为设定的第一低转速阈值。
[0018]
进一步地,为了提高助力转向控制可靠性,当方向盘的实际转向角速度的绝对值大于零,且转向管柱的扭矩小于或者等于所述所需最小转向扭矩设定值时,控制电动助力转向电机的目标转速为设定的回正转速阈值,电动液压助力转向电机的目标转速为设定的第一低转速阈值。
[0019]
进一步地,为了提高助力转向控制可靠性,当转向管柱的扭矩大于或者等于所述所需最大转向扭矩设定值时,控制电动液压助力转向电机的目标转速为设定的第一低转速阈值,电动助力转向电机的目标转速为设定的第二低转速阈值。
附图说明
[0020]
图1是本发明提供的基于eps和ehps的转向系统的控制方法的流程图。
具体实施方式
[0021]
基于eps和ehps的转向系统实施例:
[0022]
本实施例提供一种基于eps和ehps的转向系统,该转向系统可以应用于无人驾驶或者智能驾驶车辆,也可以应用在其他常规的车辆。该转向系统包括转向系统本体以及控制装置。其中,转向系统本体为包括eps和ehps的转向系统的硬件结构,该硬件结构属于现有技术,这里就不再具体说明。控制装置实现助力转向控制,包括存储器、处理器以及存储在存储器中并可在处理器上运行的计算机程序,处理器在执行计算机程序时实现的控制过程为该转向系统的控制方法。因此,本发明的发明点本质上为转向系统的控制方法,本实施例保护的是采用所保护控制方法的转向系统。
[0023]
整车实时所需的转向助力大小取决于实车载荷、路况、驾驶员操纵方向盘的角度大小、角度快慢速度以及方向盘扭矩大小等因素。当实车载荷和路况确定后,转向助力大小主要取决于驾驶员操作习惯,因此可以将驾驶员操纵方向盘角度、角度快慢、扭矩大小作为控制转向助力大小的一个有效输入条件。液压转向助力对流量的要求取决于方向盘旋转的快慢速度,旋转快需要流量大,旋转慢需要流量小;液压转向助力对压力的要求取决于方向盘旋转的角度大小,角度越大,压力越大,角度越小,压力越小;方向盘扭矩越大,所需转向助力越大,扭矩越小,所需转向助力越小。液压转向的对外输出流量可以根据转向电机转速进行实施控制,但是压力是被动量,可以根据方向盘角度大小对转向电机转速进行间接控
制,根据转角大小、扭矩大小对转向电机功耗进行控制。因此可以根据方向盘旋转的快慢速度、角度大小、扭矩大小适时控制电动转向油泵的流量,即控制转向电机转速。
[0024]
因此,基于eps和ehps的转向系统的控制方法的步骤包括:
[0025]
车辆正常上电,打开钥匙到start档后,检测方向盘的转向角度以及转向管柱的扭矩t。其中,转向角度的单位为deg,由转角传感器检测得到,正常方向盘转角定义方向盘方向:方向居中时,逆时针向左转为正,顺时针向右转为负;扭矩t的单位为n
·
m,扭矩t由转向管柱上的扭矩传感器实时采集得到,取值为t≥0。转角传感器和扭矩传感器发送信号到整车can网络上,供需要采集该信号的零部件及相关的控制器共享。
[0026]
设定方向盘的转向角度的正常范围以及转向管柱的扭矩t的正常范围,其中,方向盘的转向角度的正常范围是指大于0且小于方向盘最大允许转向角度的范围区间,为允许方向盘在单边最大转向角度的绝对值(为了保护转向机械机构,一般小于最大限位角度,如为最大限位角度的97%,以保护机械机构;转向管柱的扭矩t的正常范围是指所需最小转向扭矩设定值t0与所需最大转向扭矩设定值t1之间的范围区间,即转向管柱的扭矩t的正常范围为:t0<t<t1,所需最大转向扭矩设定值t1为扭矩传感器设置的最大值,t1表示实车所需转向力为最大状态,一般在方向盘处于最大角度时出现该极端工况;t0表示实车所需转向力为最小状态,一般在方向盘处于回正状态。
[0027]
那么,当方向盘的转向角度以及转向管柱的扭矩t均处于上述正常范围内时,检测方向盘的实际转向角速度θ,单位为deg/s。
[0028]
将检测到的转向角速度θ与转向角速度、电动助力转向电机(以下简称为eps转向电机)的目标转速和电动液压助力转向电机(以下简称为ehps转向电机)的目标转速之间的对应关系进行比对,得到与检测到的实际转向角速度对应的eps转向电机的目标转速和ehps转向电机的目标转速。当然,该对应关系满足的整体变化为:转向角速度的绝对值越大,eps转向电机的目标转速的绝对值越大,ehps转向电机的目标转速的绝对值越大。该对应关系可以由实验获取,也可以根据长期大量的实际驾驶经验获取。需要说明的是,本发明保护的是基于eps和ehps的转向系统的控制方法的实现过程,并不对其中采集到的方向盘的转向角度、方向盘的转向角速度以及转向管柱的扭矩(逻辑判断参数)的具体数值做详细要求和限定,对eps转向电机和ehps转向电机的控制转速(控制参数)也不做具体要求和限定,只要满足上述对应关系即可,因为车型不同,上述逻辑判断参数和控制参数的具体数值也不同,具体数值要结合实车进行标定。
[0029]
需要说明的是,eps转向电机可以反转,转向角速度的正负与eps转向电机的旋转方向(即转速的正负)相关,不同旋转方向下eps转向电机的转速有正负之分。而ehps转向电机不可以反转,只有一个旋转方向。
[0030]
最后,根据得到的eps转向电机的目标转速和ehps转向电机的目标转速控制eps转向电机和ehps转向电机,进行助力转向控制。
[0031]
基于上述技术方案,以下给出一种应用实例,当然,本发明所保护的技术方案并不局限于下述应用实例。
[0032]
设定θ1、θ2、θ3、θ4为具体的方向盘转向角速度值,将这四个转向角速度值作为后
续的逻辑判断条件,θ1<θ2<θ3<θ4,t1、t2、t3、t4分别为上述四个角速度对应的持续时间(单位:s,根据实车需要确定时间长短)。v1表示eps转向电机工作转速(单位:r/min),v2表示ehps转向电机工作转速(单位:r/min)。v11、v12、v13、v14为四种实施状态下的eps转向电机的控制目标转速,其中,v11<v12<v13<v14;v21、v22、v23、v24为四种实施状态下的ehps转向电机的控制目标转速,其中,v21<v22<v23<v24。
[0033]
车辆正常上电,打开钥匙到start档后,转角传感器和扭矩传感器发送信号到整车can网络上,供需要采集该信号的零部件及相关的控制器(比如转向电机控制器)共享。
[0034]
当转向电机控制器接收到转角传感器的角度且扭矩传感器信号t0<t<t1时,如图1所示:
[0035]
当0<θ<θ1且持续时间t≥t1时,控制:v1=v11,v2=v21;
[0036]
当θ1≤θ<θ2且持续时间≥t2时,控制:v1=v12,v2=v22;
[0037]
当θ2≤θ<θ3且持续时间≥t3时,控制:v1=v13,v2=v23;
[0038]
当θ3≤θ<θ4且持续时间≥t4时,控制:v1=v14,v2=v24;
[0039]
以上四种工况为正常工况,包括方向盘匀速旋转(或者大致匀速旋转)且没有到极限位置,转向力也没有到极限情况。
[0040]
进一步地,为了提升控制可靠性,以下给出几种异常工况下的助力转向控制,这几种异常工况下的助力转向控制可以根据实际需要进行取舍。
[0041]
当方向盘的转向角度大于或者等于方向盘最大允许转向角度或者方向盘的实际转向角速度θ为零,或者方向盘的转向角度等于零时,即且持续时间≥t5时,控制eps转向电机的目标转速v1为零,即v1=0,ehps转向电机的目标转速v2为设定的第一低转速阈值。第一低转速阈值为一个数值比较低的数值,这里,第一低转速阈值以v20为例,v20<v21<v22<v23<v24,v20为方向盘在最大角度下的ehps转向电机转速(单位:r/min),只要方向盘未达到最大角度,则ehps转向电机不在v20转速下工作。因此,第一低转速阈值还可以有以下解释:第一低转速阈值的绝对值小于上文中的对应关系中涉及到的所有ehps转向电机的目标转速的绝对值。
[0042]
当方向盘的实际转向角速度θ的绝对值大于零,且转向管柱的扭矩t小于或者等于所需最小转向扭矩设定值t0时,即θ>0&&t≤t0且持续时间t≥t6时,控制eps转向电机的目标转速v1为设定的回正转速阈值,ehps转向电机的目标转速为设定的第一低转速阈值。其中,设定的回正转速阈值以-v10为例,-v10表示eps转向电机方向盘回正时的转速(
“-”
表示反向),v10<v11<v12<v13<v14,v10见下文说明。这里的第一低转速阈值也以v20为例。该异常情况为方向盘处于回正状态,当t≤t0,代表实车状态为:驾驶员要对方向盘进行回正,此时eps转向电机和ehps转向电机以最低转速工作,并控制eps转向电机反转,促进方向盘回正。该控制过程的优点:方向盘回正效果好,在回正时,eps转向电机和ehps转向电机工作噪声低,能耗低。
[0043]
当转向管柱的扭矩t大于或者等于所需最大转向扭矩设定值t1时,即t≥t1且持续时间t≥t7,控制ehps转向电机的目标转速为设定的第一低转速阈值,eps转向电机的目标转速为设定的第二低转速阈值。这里的第一低转速阈值也以v20为例;第二低转速阈值以v10为例,v10为方向盘在最大角度下的eps转向电机转速(单位:r/min),只要方向盘未达到
最大角度,则eps转向电机不在v10转速下工作。因此,第二低转速阈值可以理解为:第二低转速阈值的绝对值小于上文中的对应关系中涉及到的所有eps转向电机的目标转速的绝对值。
[0044]
该情况为方向盘手力处于最大值,当大于等于t1时,代表eps转向电机达到最大扭矩,实车处于满载或路面粗糙状态,需要实时降低转速,提高转向电机过载能力,同时间接提醒驾驶员转向力已经处于最大状态。该控制过程主要是为了保护eps转向电机和ehps转向电机,控制其降额输出,避免长时间过载导致电耗高或影响寿命甚至损坏。
[0045]
表1总结了上述几种工况下的eps转向电机和ehps转向电机的转速。
[0046]
表1
[0047][0048]
上述中的t5、t6、t7为三种异常工况下持续的时间,根据实车需要确定时间长短。
[0049]
上述中的各设定阈值均能够根据实际控制需要进行具体赋值。
[0050]
上述几种目标转速(v10、v11、v12、v13、v14;v20、v21、v22、v23、v24)需要实车合理设计,过低则液压建立缓慢,反应迟钝,转向方向盘手力会不平顺,舒适度差;过高起不到节能效果,而且工作噪声大,能耗高,方向盘手感差。
[0051]
上述中,采用eps+ehps组合的转向系统,有正常的五种目标转速(v10、v11、v12、v13、v14;v20、v21、v22、v23、v24)就可以满足实车转向需求,手感舒适,控制起来可靠稳定。当然,目标转速还可以设置更多个,但是,一般情况下,目标转速不能设置太多,否则会造成控制复杂,且转向波动频繁,不利于转向电机可靠控制。v10和v20的设置考虑到助力转向电机的过载能力,在方向盘处于最大角度下,控制助力转向电机以最低转速工作,一来可降低功耗;二来方向盘在最大角度下,驾驶员作用于方向盘的手力逐渐变重,间接提示驾驶员方向盘处于最大化,不可以继续打方向盘,从而可以及时保护助力转向电机以及转向机械机构,减轻转向零部件工作强度,间接延长转向零部件工作寿命;三来降低转向工作噪声。
[0052]
该转向系统中,ehps转向电机提供主要转向助力,eps转向电机既可以提供部分转向助力,也可以模拟驾驶员操纵方向盘,两种助力转向电机巧妙配合,以实现智能驾驶。该转向系统中不需要采集整车车速,而是通过转角传感器信号间接估算车速,控制方法相对简单,容易实施。因为整车车速过高,要得稳定操控整车,正常工况下方向盘角度不可能过大。因此,该转向系统以及其中的控制方法尤其适用于转向载荷较大的汽车,更好的实现智能驾驶和无人驾驶的转向。在无人驾驶车辆中,由eps转向电机模拟人手打方向(驱动方向盘并提供较小转向助力),而ehps转向电机提供更大转向助力,以实现无人驾驶对整车操纵方向盘;在智能驾驶车辆中,主要由ehps转向电机为整车提供主要转向助力,eps转向电机
根据实车对转向助力的需求提供补充转向助力。
[0053]
以上给出了具体的实施方式,但本发明不局限于所描述的实施方式。本发明的基本思路在于上述基本方案,对本领域普通技术人员而言,根据本发明的教导,设计出各种变形的模型、公式、参数并不需要花费创造性劳动。在不脱离本发明的原理和精神的情况下对实施方式进行的变化、修改、替换和变型仍落入本发明的保护范围内。
[0054]
基于eps和ehps的转向系统的控制方法实施例:
[0055]
本实施例提供一种基于eps和ehps的转向系统的控制方法,由于该控制方法在上述基于eps和ehps的转向系统实施例中已进行了详细地描述,本实施例就不再具体说明。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips