
 商标分类
商标分类  商标转让
商标转让 
由电机和扭簧实现主动吸/脱附的自适应爬壁机器人脚掌的制作方法
 2021-02-07 15:02:33|
2021-02-07 15:02:33| 263|
263| 起点商标网
起点商标网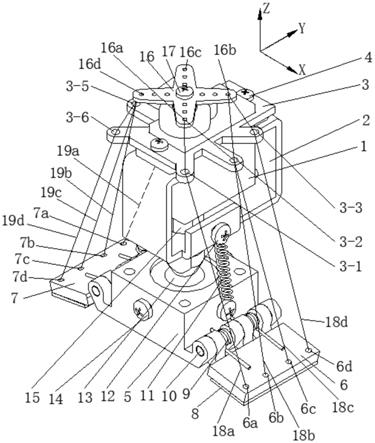
[0001]
本实用新型属于机器人技术应用领域,具体涉及由电机和扭簧实现主动吸/脱附的自适应爬壁机器人脚掌,主要用于微小型黏附式仿生爬壁机器人的应用中。
背景技术:
[0002]
随着仿生机器人技术的迅速发展,仿生爬壁机器人的研发越来越受到大众的关注。在现有的仿生爬壁机器人中,采用的吸附方式大多为负压吸附或磁吸附等,其中负压吸附需要配备真空泵,工作时噪声较大,而磁吸附一般需要额外的电源供电,且不管是负压吸附还是磁吸附都对工作环境有很大的局限性。因此,开展黏附式爬壁机器人的研究具有重要的学术价值和应用背景。而在现有的黏附式爬壁机器人中,其机器人脚掌大多只具有简单的脱附拉线传动,不具有主动黏附功能。因此,急需一种结构简单且具有主动吸/脱附的自适应爬壁机器人脚掌。
技术实现要素:
[0003]
本实用新型的目的在于提供一种由电机和扭簧实现主动吸/脱附的自适应爬壁机器人脚掌,不仅可以进行脱附拉线传动,该脚掌还具有主动吸附和脱附运动功能,通过电动机和扭簧的共同作用实现左右脚趾的内翻或外翻,可用于微小型黏附式仿生爬壁机器人的应用中。
[0004]
由电机和扭簧实现主动吸/脱附的自适应爬壁机器人脚掌,包括驱动机构、主动黏附脚掌机构以及主动脱附拉线机构;
[0005]
主动黏附脚掌机构包括中间安装座、左脚趾、右脚趾和扭簧,左脚趾和右脚趾相对设置在中间安装座的两侧,且左脚趾和右脚趾均分别通过销轴与中间安装座转动连接,在左脚趾和中间安装座、右脚趾和中间安装座之前均设置有所述扭簧,扭簧套设在销轴上,且扭簧的一脚位于中间安装座上,另一脚位于左脚趾或右脚趾上,左脚趾和右脚趾的底部均固定设置有黏附材料,左脚趾上开设有左脚趾穿线孔,右脚趾上开设有右脚趾穿线孔;
[0006]
驱动机构固定设置于主动黏附脚掌机构上方,驱动机构包括电动机架和固定在所述电动机架上的拉线电动机,且所述拉线电动机的输出轴朝上设置;
[0007]
主动脱附拉线机构包括拉线支架和旋转盘,所述拉线支架固定在电动机架上,且拉线支架上开设有穿线孔,旋转盘位于拉线支架上方且固定在拉线电动机的输出轴上,旋转盘上开设有牵引线固定孔,且左脚趾穿线孔、拉线支架上的穿线孔和牵引线固定孔之间设置有左牵引线,右脚趾穿线孔拉线支架上的穿线孔和牵引线固定孔之间也设置有右牵引线,当拉线电动机的输出轴转动时,通过左牵引线带动左脚趾、右牵引线带动右脚趾同时内翻或外翻。
[0008]
进一步地改进,在所述主动黏附脚掌机构和驱动机构之间设置有自适应球关节机构,
[0009]
自适应球关节机构包括杆端关节轴承和复位弹簧,杆端关节轴承一端与中间安装
座铰接,另一端固定在电动机架上,复位弹簧的一端固定在中间安装座上,另一端固定在电动机架上。在球头关节轴承和复位弹簧的共同作用下,实现脚掌的自适应和自复位。
[0010]
进一步地改进,中间安装座的左右两侧壁上均固定设置有第一耳座,左脚趾和右脚趾的一侧壁上均固定设置有第二耳座,左脚趾上的第二耳座与位于中间安装座左侧的第一耳座上穿设有销轴,右脚趾上的第二耳座与位于中间安装座右侧的第一耳座上也穿设有销轴。
[0011]
进一步地改进,中间安装座的左右两侧均开设有沟槽,扭簧的两脚之间呈180度,扭簧一脚插入所述沟槽中,另一脚搭在左脚趾或右脚趾的上表面。将扭簧的一脚插入沟槽中有利于减小中间安装座的体积。
[0012]
进一步地改进,中间安装座的底面、左脚趾的底面和右脚趾的底面处于同一平面上或形成曲面。当为平面时,脚掌可用于工作面为平面的爬行,当为曲面时,可以适应具有弧度的工作面,使得脚掌和工作面充分贴合。
[0013]
进一步地改进,旋转盘上开设有若干牵引线固定孔,拉线支架上开设有若干穿线孔,左牵引线的一端固定在左脚趾穿线孔上,另一端穿过位于同一侧的穿线孔,然后固定在位于同一侧的牵引线固定孔内;右牵引线的一端固定在右脚趾穿线孔上,另一端穿过位于同一侧的穿线孔,然后固定在位于同一侧的牵引线固定孔内。
[0014]
进一步地改进,左脚趾上开设有4个左脚趾穿线孔,分别定义为左脚趾a穿线孔a、左脚趾b穿线孔b、左脚趾c穿线孔c和左脚趾d穿线孔d,右脚趾开设有4个右脚趾穿线孔,分别定义为右脚趾a穿线孔a、右脚趾b穿线孔b、右脚趾c穿线孔c和右脚趾d穿线孔d;
[0015]
旋转盘呈十字形,包括4个分支,每个分支上均开设有牵引线固定孔,其中两个分支与左脚趾位于同一侧,另两个分支与右脚趾位于同一侧,
[0016]
将4个分支上的牵引线固定孔分别定为牵引线固定孔a、牵引线固定孔b、牵引线固定孔c和牵引线固定孔d,
[0017]
拉线支架包括6个拉线分支,每个拉线分支上均开设有穿线孔,其中三个拉线分支与左脚趾位于同一侧,另三个拉线分支与右脚趾位于同一侧,将个分支上的穿线孔分别定义为一号穿线孔、二号穿线孔、三号穿线孔、四号穿线孔、五号穿线孔、六号穿线孔,
[0018]
所述左牵引线有4条,分别定义为左牵引线a、左牵引线b、左牵引线c和左牵引线d,
[0019]
所述右牵引线有4条,分别定义为右牵引线a、右牵引线b、右牵引线c和右牵引线d,
[0020]
其中,
[0021]
左牵引线a一端固定在左脚趾a穿线孔,通过一号穿线孔后,另一端固定于牵引线固定孔a;
[0022]
左牵引线b一端固定在左脚趾b穿线孔,通过二号穿线孔后,另一端固定于牵引线固定孔a;
[0023]
左牵引线c一端固定在左脚趾c穿线孔,通过二号穿线孔后,另一端固定于牵引线固定孔b;
[0024]
左牵引线d一端固定在左脚趾d穿线孔,通过三号穿线孔后,另一端固定于牵引线固定孔b;
[0025]
右牵引线a一端固定在右脚趾a穿线孔,通过四号穿线孔后,另一端固定于牵引线固定孔c;
[0026]
右牵引线b一端固定在右脚趾b穿线孔,通过五号穿线孔后,另一端固定于牵引线固定孔c;
[0027]
右牵引线c一端固定在右脚趾c穿线孔,通过五号穿线孔后,另一端固定于牵引线固定孔d;
[0028]
右牵引线d一端固定在右脚趾d穿线孔,通过六号穿线孔后,另一端固定于牵引线固定孔d。
[0029]
进一步地改进,旋转盘的每个分支沿分支长度方向上开设有若干的牵引线固定孔。选用分支长度方向上不同的牵引线固定孔可提供不同的拉力,可根据实际所学牵引力选用不同的牵引线固定孔。
[0030]
进一步地改进,所述黏附材料为压敏胶带或干粘合剂材料。
[0031]
本实用新型的工作原理为:本实用新型中电动机架和中间安装架的两端各装有约束弹簧,通过这种具有复位功能的弹簧约束球关节,实现了脚掌具有自适应性的同时,在不受力的情况下可以恢复到初始位置,即在脚掌抬起来的时候恢复到初始位置,这样保证了脚掌能与空间表面贴合,具备仿生脚掌在空间表面自适应的能力。本实用新型的中间安装座和左、右脚趾的底面可根据工作面的不同,加工为不同弧度的曲面时,可自适应不同弧度的工作面,使脚掌充分和工作面贴合。为了实现脚掌的主动吸/脱附,脚掌的左、右脚趾下面贴有黏附材料,且巧妙的利用电动机的简单转动配合扭簧的扭转作用实现左、右脚趾完成外翻和内翻运动,结合黏附材料作用效果,可有效实现粘附脚趾的主动吸附和脱附运动功能,增加了微小型粘附式爬壁机器人在目标表面粘附移动的可操作性,有效地提高了粘附的稳定性。
[0032]
与现有技术相比,本实用新型能够实现的有益效果如下:
[0033]
1、本实用新型可以主动驱动脚趾实现主动吸附和主动脱附功能,方便微小型黏附式爬壁机器人在目标表面的粘/脱附行走运动;
[0034]
2、本实用新型巧妙的利用电动机的简单转动配合扭簧的扭转作用便能实现左、右脚趾完成外翻和内翻运动,避免的复杂的传动机构,结构巧妙、体积小、重量轻、加工方便、经济可行;
[0035]
3、本实用新型在球关节处设有复位弹簧来约束球关节,从而脚掌具备自适应性的同时还具备自复位性,使得脚掌可以更好的与空间表面贴合,具备仿生脚掌在空间表面自适应的能力;
[0036]
4.本实用新型可通根据工作面的不同,加工为不同弧度的曲面时,可自适应不同弧度的工作面,使脚掌充分和工作面贴合,具有较广的适用性。
附图说明
[0037]
图1是本实用新型实施例提供的由电机和扭簧实现主动吸/脱附的自适应爬壁机器人脚掌的整体结构示意图。
[0038]
图2是本实用新型实施例提供的由电机和扭簧实现主动吸/脱附的自适应爬壁机器人脚掌(去除牵引线)的俯视图。
[0039]
图3是本实用新型所述脚掌部分分别在平面和曲面的示意图。
[0040]
图4是本实用新型由电机和扭簧实现主动吸/脱附的自适应爬壁机器人脚掌主动
粘附运动图。
[0041]
图5是本实用新型由电机和扭簧实现主动吸/脱附的自适应爬壁机器人脚掌主动脱附运动图。
[0042]
图中:1、拉线电动机;2、电动机架;3、拉线支架;3-1、一号穿线孔;3-2、二号穿线孔;3-3、三号穿线孔;3-4、四号穿线孔;3-5、五号穿线孔;3-6、六号穿线孔;4、安装螺钉;5、中间安装座;6、左脚趾;6a、左脚趾a穿线孔;6b、左脚趾b穿线孔;6c、左脚趾c穿线孔;6d、左脚趾d穿线孔;7、右脚趾;7a、右脚趾a穿线孔;7b、右脚趾b穿线孔;7c、右脚趾c穿线孔;7d、右脚趾d穿线孔;8、黏附材料;9、扭簧;10、销轴;11、复位弹簧;12、复位弹簧安装螺钉;13、杆端关节轴承;14、紧定螺钉;15、安装螺母;16、旋转盘;16a、牵引线固定孔a;16b、牵引线固定孔b;16c、牵引线固定孔c;16d、牵引线固定孔d;17、旋转盘安装螺钉;18、左牵引线、18a、左牵引线a;18b、左牵引线b;18c、左牵引线c;18d、左牵引线d;19、右牵引线、19a、右牵引线a;19b、右牵引线b;19c、右牵引线c;19d、右牵引线d。
具体实施方式
[0043]
下面结合附图和具体实施例对本实用新型作进一步详细说明:
[0044]
结合图1-2,本实施例为由电动机和扭簧共同实现主动吸/脱附的自适应爬壁机器人脚掌,包括驱动部分、主动黏附脚掌机构、自适应球关节机构、以及主动脱附拉线机构。
[0045]
如图1所示,定义三维坐标系,z轴为脚掌向上方向,y轴为脚掌向后方向,x轴为脚掌向左方向。
[0046]
驱动机构固定设置于主动黏附脚掌机构上方,驱动部分包括拉线电动机1、电动机架2,以及配设的安装螺钉4,电动机架2呈u字型,电动机架2的开口向上,拉线电动机1的输出轴平行于z轴向上,拉线电动机1通过安装螺钉4固定在电动机架2上。本机器人脚掌安装应用于四足爬壁机器人的小腿端部,电动机架2沿y方向的侧面上开设有两个螺纹孔,使用时,通过这两个螺纹孔将整个脚掌结构安装于机器人的小腿端部。
[0047]
主动黏附脚掌机构包括中间安装座5、左脚趾6、右脚趾7和实现脚趾自黏附的四个扭簧9,左脚趾6和右脚趾7转动设置在中间安装座5的左右两侧。中间安装座5的左右两侧壁上均固定设置有第一耳座,左脚趾6和右脚趾7的一侧壁上均固定设置有第二耳座,左脚趾6上的第二耳座与位于中间安装座5左侧的第一耳座上穿设有一销轴10以实现左脚趾6和中间安装座6之间的转动连接,右脚趾7上的第二耳座与位于中间安装座5右侧的第一耳座上也穿设有一销轴10以实现右脚趾7和中间安装座5之间的转动连接。每个销轴10上均套设有两个扭簧9,具体地,中间安装座5的左右两侧均开设有沟槽,扭簧9的两脚之间呈180度,扭簧9一脚插入沟槽中,有利于减小中间安装座5的体积,另一脚搭在左脚趾6或右脚趾7的上表面。左脚趾6和右脚趾7的底部均固定设置有黏附材料8,左脚趾6上开设有左脚趾穿线孔,右脚趾7上开设有右脚趾穿线孔。左脚趾6和右脚趾7上贴有黏附材料8,用于提供机器人爬行时的抓地力以及在微重力作用下提供相应的吸附力。黏附材料可以采用压敏胶带、干粘合剂材料等可多次使用的黏附材料。
[0048]
在驱动机构和主动黏附脚掌机构之间设置有自适应球关节机构,自适应球关节机构包括杆端关节轴承13和复位弹簧11,本实施例中的杆端关节轴承13为单杆球头关节轴承,杆端关节轴承13一端与中间安装座5铰接,另一端固定在电动机架2上,复位弹簧11的一
2后,另一端固定于牵引线固定孔a16a;左牵引线c18c一端固定在左脚趾c穿线孔6c,通过二号穿线孔3-2后,另一端固定于牵引线固定孔b16b;左牵引线d18d一端固定在左脚趾d穿线孔6d,通过三号穿线孔3-3后,另一端固定于牵引线固定孔b16b;右牵引线a19a一端固定在右脚趾a穿线孔7a,通过四号穿线孔3-4后,另一端固定于牵引线固定孔c16c;右牵引线b19b一端固定在右脚趾b穿线孔7b,通过五号穿线孔3-5后,另一端固定于牵引线固定孔c16c;右牵引线c19c一端固定在右脚趾c穿线孔7c,通过五号穿线孔3-5后,另一端固定于牵引线固定孔d16d;右牵引线d19d一端固定在右脚趾d穿线孔7d,通过六号穿线孔3-6后,另一端固定于牵引线固定孔d16d。
[0058]
本实用新型所述的由电机和扭簧实现主动吸/脱附的自适应爬壁机器人脚掌,其具体的工作流程如下:当脚掌处于悬空状态时,拉线电动机带动旋转盘,使得主动脱附拉线机构拉紧,左、右脚趾克服扭簧的作用力而处于外翻状态,如图5所示;脚掌逐渐下踩,当脚掌与工作面接触时,电动机反转,恢复到初始位置,此时左、右脚趾在扭簧的扭转力的作用下完成内翻运动,使得黏附材料贴紧工作表面,如图4所示;当脚掌需要再次抬起时,电动机再次带动旋转盘,使得主动脱附拉线机构拉紧,从而克服扭簧和黏附材料的作用力,左、右脚趾再次完成外翻动作,进而脚掌抬起,如此反复,实现了黏附式爬壁机器人的爬行运动。使用电动机的简单转动配合扭簧的扭转作用便能实现左、右脚趾完成外翻和内翻运动,避免的复杂的传动机构,且稳定可靠。
[0059]
如图4所示,当电动机轴处于初始位置时,左牵引线18和右牵引线19均处于放松状态,左、右脚趾在扭簧的作用力下,处于内翻状态,促使粘附材料与接触表面贴合粘附,实现主动粘附功能。
[0060]
如图5所示,当电动机轴绕着z轴转动时,旋转盘16随之转动,从而带动左牵引线和右牵引线处于拉紧张状态,左、右脚趾在左、右牵引线的拉力作用下,克服扭簧和黏附材料的作用力,使得两脚趾外翻,实现主动脱附功能。
[0061]
中间安装座5的底面、左脚趾6的底面和右脚趾7的底面处于同一平面上或形成曲面。当中间安装座5和左、右脚趾的底面为平面时,该脚掌可用于平面的爬行,而当中间安装座5和左、右脚趾的底面根据工作面的不同,加工为不同弧度的曲面时,可自适应不同弧度的工作面,使脚掌充分和工作面贴合,例如适合用于机器人在管道的爬行。
[0062]
旋转盘16的每个分支沿分支长度方向上开设有若干的牵引线固定孔。本实施例中每个分支上等距离开设有3个牵引线固定孔。选用不同的牵引线固定孔可提供不同的拉力,可根据实际所需牵引力选用不同的牵引线固定孔。
[0063]
以上所述的实施例对本实用新型的技术方案和有益效果进行了详细说明,应理解的是以上所述仅为本实用新型的具体实施例,并不用于限制本实用新型,凡在本实用新型的原则范围内所做的任何修改、补充和等同替换,均应包含在本实用新型的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips