
 商标分类
商标分类  商标转让
商标转让 
利用模型预测扭矩请求的扭矩矢量控制的制作方法
 2021-02-07 13:02:06|
2021-02-07 13:02:06| 358|
358| 起点商标网
起点商标网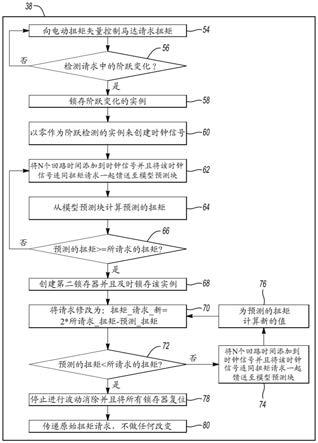
[0001]
本公开涉及车辆传动系控制。
背景技术:
[0002]
扭矩矢量控制可用于改善车辆的转弯和稳定性。从根本上讲,扭矩矢量控制系统在驱动轮之间重新分配扭矩。例如,在转弯时,这样的系统可将更多的扭矩发送至位于转角外侧的车轮。外侧车轮产生的额外的“推动力”会生成横摆力矩,帮助转弯,收紧线。
技术实现要素:
[0003]
一种车辆电动扭矩矢量控制系统包括:牵引马达;矢量控制马达;齿轮,所述齿轮被配置为将扭矩从推进马达和所述矢量控制马达传递到车轮;以及控制器。所述控制器响应于针对所述矢量控制马达的未修改的扭矩请求中的阶跃变化以及所述矢量控制马达的预测的扭矩响应大于所述未修改的扭矩请求,利用小于所述未修改的扭矩请求的修改后的扭矩请求命令所述矢量控制马达生成扭矩。所述控制器进一步响应于所述预测的扭矩响应变得小于所述未修改的扭矩请求,利用所述未修改的扭矩请求命令所述矢量控制马达生成扭矩。
[0004]
一种用于控制车辆电动扭矩矢量控制系统的方法包括:响应于针对被配置为与牵引马达协同为车轮生成扭矩的矢量控制马达的未修改的扭矩请求中的阶跃变化以及所述矢量控制马达的预测的扭矩响应大于所述未修改的扭矩请求,由控制器利用修改后的扭矩请求命令所述矢量控制马达生成扭矩,直到所述预测的扭矩响应变得小于所述未修改的扭矩请求为止。所述修改后的扭矩请求的幅度小于所述未修改的扭矩请求并且顺序地增大、减小、然后增大。
[0005]
一种车辆包括:车轮;牵引马达和矢量控制马达,所述牵引马达和所述矢量控制马达各自被配置成为所述车轮生成扭矩;以及控制器。所述控制器响应于针对所述矢量控制马达的未修改的扭矩请求中的阶跃变化以及所述矢量控制马达的预测的扭矩响应大于所述未修改的扭矩请求,利用修改后的扭矩请求命令所述矢量控制马达生成扭矩,直到所述预测的扭矩响应变得小于所述未修改的扭矩请求为止。所述修改后的扭矩请求的幅度小于所述未修改的扭矩请求并且顺序地增大、减小、然后增大。所述控制器进一步响应于所述预测的扭矩响应变得小于所述未修改的扭矩请求,利用所述未修改的扭矩请求命令所述矢量控制马达生成扭矩。
附图说明
[0006]
图1是车辆电动扭矩矢量控制系统的框图。
[0007]
图2是所测量的扭矩和经滤波的扭矩对时间的曲线图。
[0008]
图3是在模型预测控制活动或不活动的情况下所测量的扭矩对时间的曲线图。
[0009]
图4是在模型预测控制活动或不活动的情况下扭矩请求对时间的曲线图。
[0010]
图5是实现模型预测控制的算法的流程图。
具体实施方式
[0011]
本文中描述了本公开的各种实施例。然而,所公开的实施例仅仅是示例性的,并且其他实施例可采用未明确示出或描述的各种和替代形式。附图不一定按比例绘制;一些特征可被放大或最小化以示出特定部件的细节。因此,本文中所公开的具体结构细节和功能细节不应被解释为是限制性的,而是仅仅作为教导本领域普通技术人员以不同方式采用本发明的代表性基础。如本领域普通技术人员将理解,参考附图中的任何一个来示出和描述的各种特征可以与在一个或多个其他附图中所示出的特征相组合,以产生未明确示出或描述的实施例。所示特征的组合提供典型应用的代表性实施例。然而,与本公开的教导一致的特征的各种组合和修改可以是特定应用或实现方式所期望的。
[0012]
电动扭矩矢量控制系统将扭矩横向偏置,以在车辆上产生力矩并且帮助车辆转向。有多种方式可以实现电动扭矩矢量控制。一种这样的方式是叠加,其中将来自大型推进马达的扭矩通过一组行星齿轮叠加在来自小型矢量控制马达的扭矩上。
[0013]
图1示出了车辆12的电动扭矩矢量控制系统10的示例。电动扭矩矢量控制系统10包括牵引马达和齿轮箱14、矢量控制马达和齿轮箱16、行星齿轮组18、20、车轮/轮胎组件22、24、轴26、28、30、32、34、36以及一个或多个控制器38。控制器38与牵引马达和齿轮箱14以及矢量控制马达和齿轮箱16通信/控制它们,并且可实现本文中所设想的算法。
[0014]
行星齿轮组18包括中心齿轮40、齿轮架和行星齿轮42以及环形齿轮44。同样,行星齿轮组20包括中心齿轮46、齿轮架和行星齿轮48以及环形齿轮50。轴26将牵引马达和齿轮箱14与中心齿轮40机械地联接。轴30将矢量控制马达和齿轮箱14与环形齿轮44机械地联接。轴34将车轮/轮胎组件22与齿轮架和行星齿轮42机械地联接。同样,轴28将牵引马达和齿轮箱14与中心齿轮46机械地联接。轴32将矢量控制马达和齿轮箱16与环形齿轮50机械地联接。轴36将车轮/轮胎组件24与齿轮架和行星齿轮48机械地联接。
[0015]
在这种布置中,矢量控制马达和齿轮箱16作用于车轮/轮胎组件22、24之间的速度差,而不是车辆12的速度。这意味着马达16所需的功率相对小,但对于任何明显的矢量控制横摆(vectoring yaw),在车轮/轮胎组件22、24处所需的扭矩可能超过1,000nm。因此,齿轮箱16可能相对大。
[0016]
鉴于这种架构,小惯性(马达16)通过大齿轮减速(齿轮箱16)连接到扭转弹簧(轴30、32)。这可使系统表现为类似质量-弹簧-阻尼器系统,其中具有共振行为并且倾向于表现出大的扭矩振荡,尤其是在需要扭矩突然增大(诸如具有阶跃函数)的情况下。图2示出了这种系统的车辆测量值(所测量的扭矩),其在第一峰值上的扭矩过冲(torque overshoot)的幅度几乎是初始请求的两倍。
[0017]
在此,提出了一种模型预测方法,该模型预测方法校正扭矩请求,以消除未来将在两到三个回路时间发生的预测振荡的影响。提出模型预测解决方案而不是更传统的反馈解决方案的原因是在汽车局域网上传播传感器数据时存在时间延迟。此延迟可能超过两个回路时间(loop time)(例如,32ms)。这意味着任何形式的反馈控制都将试图校正可能已经发生的事件。因此,对于其中基于当前扭矩请求在未来两到三个回路预测扭矩振荡的幅度的情况,需要模型预测控制方法。通过预计未来任何给定时间的振荡幅度,校正当前扭矩请
求,以便抵消未来将发生的预计振荡。
[0018]
有若干种方式来创建能够预测上述行为的模型。对于这个扭矩矢量控制示例,分析表明,系统响应具有大约6hz的相对恒定的固有频率。此外,通过对从马达16到车轮/轮胎组件22、24的扭矩矢量控制分支进行建模,很明显,该系统表现为类似具有两个实极点和四个虚极点的六阶系统。假设车辆左右对称,则该系统的时间响应可简化为具有一个实主导极点(real dominant pole)和两个虚主导极点(imaginary dominant pole)的三阶系统。因此,给定扭矩阶跃的时间响应可利用以下通用表达式来建模:
[0019][0020]
其中t(t)为随时间t而变的扭矩响应(所预测的扭矩),t
tv,cmd
为所请求的扭矩,ρ
tv
为齿轮箱16的传动比,并且c
1
、c
2
、c
3
、γ
1
、γ
2
和ω
1
为需要使用已知技术来识别的系统相关参数。一种识别这些参数的方式是:针对给定的已知请求测量车辆中随时间而变的扭矩迹线,然后使用已知的信赖域最小化算法来将t(t)的表达式拟合到所测量的迹线,如图2所示。通过这样做,已知的信赖域算法将计算参数c
1
、c
2
、c
3
、γ
1
、γ
2
和ω
1
,使得均方根误差最小化。
[0021]
信赖域拟合算法的可能缺点是:通过均方根误差所定义的解的优度取决于对参数c
1
、c
2
、c
3
、γ
1
、γ
2
和ω
1
的初始猜测。也就是说,可能存在多个局部解可以提供良好的拟合,但只有一个全局解可以在均方根误差接近于零的情况下产生最佳拟合。由于期望使系统能够预测针对例如从0到1200nm的任何给定阶跃请求的扭矩响应,因此要么需要全局解,要么应当在不同的扭矩水平下识别多个拟合以创建系统响应的映射图以用于插值目的。例如,可记录针对100nm请求、300nm请求、500nm请求、700nm请求、900nm请求和1100nm请求的扭矩迹线,然后将t(t)拟合到这些迹线中的每个迹线以创建具有t
100
(t)、t
300
(t)、t
500
(t)、t
700
(t)、t
900
(t)和t
1100
(t)的映射图。然后,可使用标准插值器来计算落在两条连续迹线之间的系统响应。
[0022]
图3中示出了这种示例性方法的结果。当模型预测特征被关闭时,在车辆半轴处针对500nm请求所测量的扭矩揭示了第一峰值接近1000nm的振荡。当模型预测特征被打开时,系统的所测量的响应显示出扭矩波动的显著衰减。可进一步调谐该衰减以实现最佳结果。
[0023]
参考图4,与扭矩波动的这种衰减相对应的是扭矩请求的变化,该扭矩请求基于系统在未来两个回路的预测的响应而迭代地进行修改。在该示例中,修改后的请求在达到原始请求值之前形成了递增-递减-递增的阶梯时间曲线。也就是说,在该示例中,修改后的请求的幅度顺序地增大、减小、然后增大。这与模型预测特征被关闭的情况形成对比,其中请求表示从0到500nm的纯阶跃函数。需注意,在该方法中,仅需要消除第一峰值,因为一旦该峰值衰减,该系统中将留下很少的波动能量。
[0024]
图5的流程图示出,在操作54处,向电动扭矩矢量控制马达请求扭矩。如果在判定框56处未检测到请求中的阶跃变化,则算法返回操作54。否则,该算法前进到操作58。在操作58处,锁存阶跃变化的实例。在操作60处,以零作为阶跃检测的实例来创建时钟信号。在操作62处,将n个回路时间(例如,2个回路时间)添加到时钟信号,并且将更新后的时钟信号和所请求的扭矩发送至模型预测算法。在操作64处,通过模型预测算法来计算预测的扭矩。如果在判定框66处,预测的扭矩小于所请求的扭矩,则在操作67处,命令电动扭矩矢量控制马达生成所请求的扭矩,并且算法返回操作62。
[0025]
如果算法返回操作62预定次数(例如,4次)或者迭代执行操作62、64、66、67的时间比预定的持续时间(例如,200毫秒)长,则算法可前进到操作78。否则,该算法前进到操作68。
[0026]
在操作68处,锁存该实例。在操作69处,根据以下关系式修改该请求:
[0027]
修改后的所请求的扭矩=2
×
扭矩请求
–
预测的扭矩
[0028]
在操作70处,将修改后的所请求的扭矩发送至模型预测算法。在操作71处,通过模型预测算法来计算预测的扭矩。如果在判定框72处,该新的预测的扭矩大于所请求的扭矩,则在操作73处,命令电动扭矩矢量控制马达生成修改后的所请求的扭矩,并且算法前进到操作74。否则,该算法前进到操作78。在操作74处,将n个回路时间添加到时钟信号,并且将更新后的时钟信号和修改后的所请求的扭矩发送至模型预测算法。在操作76处,通过模型预测算法来计算预测的扭矩。然后,该算法前进到操作69。
[0029]
在操作78处,停止进行波动消除,并且将所有锁存器复位。在操作80处,命令电动扭矩矢量控制马达生成(原始)所请求的扭矩。
[0030]
所公开的算法、过程、方法、逻辑或策略可递送到处理装置、控制器或计算机和/或由其实现,所述处理装置、控制器或计算机可包括任何现有的可编程电子控制单元或专用电子控制单元。类似地,算法、过程、方法、逻辑或策略可以存储为可由控制器或计算机以许多形式执行的数据和指令,所述形式包括但不限于:永久地存储在各种类型的制品上的信息,所述各种类型的制品可以包括持久不可写存储介质(诸如rom装置);以及可变地存储在可写存储介质(诸如软盘、磁带、cd、ram装置以及其他磁介质和光学介质)上的信息。算法、过程、方法、逻辑或策略也可以软件可执行对象实现。替代地,它们可以全部地或部分地使用合适的硬件部件来体现,所述合适的硬件部件诸如专用集成电路(asic)、现场可编程门阵列(fpga)、状态机、控制器或其他硬件部件或装置,或硬件、软件和固件部件的组合。
[0031]
在说明书中所使用的用词是描述用词而非限制用词,并且应当理解,可以在不脱离本公开和权利要求的精神和范围的情况下做出各种改变。如前所述,各个实施例的特征可以被组合以形成可能未明确描述或示出的另外的实施例。尽管各个实施例可能已被描述为在一个或多个期望的特性方面提供优于其他实施例或现有技术实现方式的优点或相比其他实施例或现有技术实现方式是优选的,但是,本领域的普通技术人员认识到,一个或多个特征或特性可以被折衷以实现期望的整体系统属性,所述期望的整体系统属性取决于具体的应用和实现方式。这些属性包括但不限于成本、强度、耐久性、生命周期成本、可销售性、外观、包装、尺寸、适用性、重量、可制造性、易于组装等。因此,被描述为关于一个或多个特性不如其他实施例或现有技术实现方式所期望的实施例不在本公开的范围之外,并且对于特定应用可能是期望的。
[0032]
根据本发明,提供了一种车辆电动扭矩矢量控制系统,所述车辆电动扭矩矢量控制系统具有:牵引马达;矢量控制马达;齿轮,所述齿轮被配置为将扭矩从推进马达和所述矢量控制马达传递到车轮;以及控制器,所述控制器被编程为:响应于针对所述矢量控制马达的未修改的扭矩请求中的阶跃变化以及所述矢量控制马达的预测的扭矩响应大于所述未修改的扭矩请求,利用小于所述未修改的扭矩请求的修改后的扭矩请求命令所述矢量控制马达生成扭矩;以及响应于所述预测的扭矩响应变得小于所述未修改的扭矩请求,利用所述未修改的扭矩请求命令所述矢量控制马达生成扭矩。
[0033]
根据实施例,所述控制器被进一步编程为响应于所述未修改的扭矩请求中的所述阶跃变化以及所述预测的扭矩响应小于所述未修改的扭矩请求,利用所述未修改的扭矩请求命令所述矢量控制马达生成扭矩。
[0034]
根据实施例,所述修改后的扭矩请求具有随时间变化的幅度。
[0035]
根据实施例,所述幅度增大、减小、然后增大。
[0036]
根据实施例,所述修改后的扭矩请求是基于所述预测的扭矩响应。
[0037]
根据实施例,所述齿轮包括行星齿轮组。
[0038]
根据实施例,所述行星齿轮组包括经由轴与所述车轮机械地联接的行星齿轮。
[0039]
根据本发明,一种用于控制车辆电动扭矩矢量控制系统的方法包括:响应于针对被配置为与牵引马达协同为车轮生成扭矩的矢量控制马达的未修改的扭矩请求中的阶跃变化以及所述矢量控制马达的预测的扭矩响应大于所述未修改的扭矩请求,由控制器利用修改后的扭矩请求命令所述矢量控制马达生成扭矩,直到所述预测的扭矩响应变得小于所述未修改的扭矩请求为止,所述修改后的扭矩请求的幅度小于所述未修改的扭矩请求并且顺序地增大、减小、然后增大。
[0040]
根据实施例,本发明的特征还在于:响应于所述预测的扭矩响应变得小于所述未修改的扭矩请求,由所述控制器利用所述未修改的扭矩请求命令所述矢量控制马达生成扭矩。
[0041]
根据实施例,本发明的特征还在于:响应于所述未修改的扭矩请求中的所述阶跃变化以及所述预测的扭矩响应小于所述未修改的扭矩请求,由所述控制器利用所述未修改的扭矩请求命令所述矢量控制马达生成扭矩。
[0042]
根据实施例,所述修改后的扭矩请求是基于所述预测的扭矩响应。
[0043]
根据本发明,提供了一种车辆,所述车辆具有:车轮;牵引马达和矢量控制马达,所述牵引马达和所述矢量控制马达各自被配置成为所述车轮生成扭矩;以及控制器,所述控制器被编程为:响应于针对所述矢量控制马达的未修改的扭矩请求中的阶跃变化以及所述矢量控制马达的预测的扭矩响应大于所述未修改的扭矩请求,利用修改后的扭矩请求命令所述矢量控制马达生成扭矩,直到所述预测的扭矩响应变得小于所述未修改的扭矩请求为止,所述修改后的扭矩请求的幅度小于所述未修改的扭矩请求并且顺序地增大、减小、然后增大;以及响应于所述预测的扭矩响应变得小于所述未修改的扭矩请求,利用所述未修改的扭矩请求命令所述矢量控制马达生成扭矩。
[0044]
根据实施例,所述控制器被进一步编程为响应于所述未修改的扭矩请求中的所述阶跃变化以及所述预测的扭矩响应小于所述未修改的扭矩请求,利用所述未修改的扭矩请求命令所述矢量控制马达生成扭矩。
[0045]
根据实施例,所述修改后的扭矩请求是基于所述预测的扭矩响应。
[0046]
根据实施例,本发明的特征还在于齿轮,所述齿轮被配置为将扭矩从所述牵引马达和所述矢量控制马达传递到所述车轮。
[0047]
根据实施例,所述齿轮包括行星齿轮组。
[0048]
根据实施例,所述行星齿轮组包括经由轴与所述车轮机械地联接的行星齿轮。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips