
 商标分类
商标分类  商标转让
商标转让 
一种机械仿生恐龙腿部结构的制作方法
 2021-02-07 13:02:43|
2021-02-07 13:02:43| 275|
275| 起点商标网
起点商标网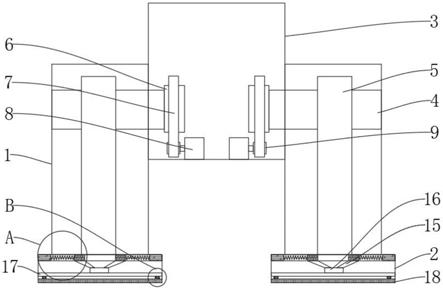
[0001]
本实用新型涉及机械仿生恐龙腿部结构领域,特别是涉及一种机械仿生恐龙腿部结构。
背景技术:
[0002]
目前的机械恐龙在进行行走的过程中,脚部受到压力传输到腿部结构,脚底没有进行减压的装置可能会导致腿部承受的的压力过大造成腿部结构受损,从而使整个机械恐龙结构陷入瘫痪从而无法进行行走,造成经济损失。
技术实现要素:
[0003]
针对上述问题,本实用新型提供了一种机械仿生恐龙腿部结构,具有可以减少脚底所承受的压力传到腿部,防止了压力过大导致腿内部结构发生损坏从而造成经济损失,用于保护腿内部结构的使用寿命与通过电机带动转轴带动腿结构进行运动,使用方便操作简单的优点。
[0004]
本实用新型的技术方案是:一种机械仿生恐龙腿部结构,包括仿生腿与仿生身体与仿生脚,所述仿生脚的内部固定连接有固定架,所述固定架的内部设置有滑槽,所述滑槽的内部固定连接有固定块,所述滑槽的内部且位于固定块的侧壁固定连接第一弹簧,所述第一弹簧的远离固定块的一端固定连接有移动块,所述移动块底端固定连接有固定杆,所述固定杆倾斜设置,所述固定杆远离移动块的一端固定连接有支撑块,所述支撑块的底端固定连接有支撑板,所述支撑板的底端固定连接有加强筋,所述加强筋的底端固定连接有缓冲垫,所述支撑板的底端且位于加强筋的外表面弹性连接有第二弹簧。
[0005]
上述技术方案的工作原理如下:
[0006]
当仿生腿进行运动时,由于仿生恐龙的体积较大,仿生脚底部所述产生的压力较大可能造成仿生腿受损,当仿生腿进行运动时,仿生脚的压力通过缓冲垫向下挤压第二弹簧与加强筋至支撑板处,支撑板感到压力带动支撑块向下进行移动,支撑块进行向下带动两根固定杆进行运动,固定杆进行挤压固定架内部的滑槽中的移动块发生移动,移动块进行挤压第一弹簧至固定块处进行缓冲压力与将第一弹簧进行复位减少压力对仿生腿的危害。
[0007]
在进一步的技术方案中,仿生身体的内部固定连接有电机,电机的输出端固定连接有第二齿轮,通过设置有电机方便进行带动第二齿轮进行旋转,仿生脚的内部活动连接有转轴,转轴的侧壁固定连接有第一齿轮,第二齿轮的正面活动连接有链条,第一齿轮与第二齿轮通过链条活动连接。
[0008]
通过设置有电机与第一齿轮与第二齿轮与转轴与链条,可以通过电机输出端的第一齿轮旋转通过链条带动第二齿轮进行旋转,第二齿轮带动转轴进行旋转,转轴旋转带动仿生腿倾斜抬高。
[0009]
在进一步的技术方案中,所述转轴的正面固定连接有移动机构,所述移动机构的
底端与固定架的顶端固定连接。
[0010]
通过设置有移动机构,通过转轴带动移动移动机构抬高倾斜,在通过移动机构带动仿生脚向前进行移动。
[0011]
在进一步的技术方案中,所述缓冲垫与固定块的材料均为弹性橡胶材料制成,所述固定块与第一弹簧与移动块的数量均为两个,用于加强缓冲压力的作用,防止压力过大导致仿生腿发生损坏。
[0012]
在进一步的技术方案中,所述加强筋的数量有四个,且加强筋的位置靠近缓冲垫的四角处,所述第二弹簧的一端与缓冲垫弹性连接,加强缓冲垫减压的能力。
[0013]
在进一步的技术方案中,所述仿生腿与仿生脚与仿生身体的材料均采用硅胶制成,增加了仿生恐龙的真实感。
[0014]
本实用新型的有益效果是:
[0015]
1、当仿生恐龙发生运动时,可以通过缓冲垫进行缓冲压力至加强筋与第二弹簧进一步减少压力的危害,最后通过支撑板进行加压支撑块带动支撑块底端的固定杆进行带动移动板进行挤压第一弹簧至固定块进行减少压力并使第一弹簧进行复位,防止了压力过大对仿生腿内部的支撑杆与转轴造成损伤。
[0016]
2、当需要进行运动时,通过打开电机进行带动第一齿轮运动,第一齿轮进行旋转通过链条带动第二齿轮进行旋转,第二齿轮进行带动转轴进行转动,转轴带动移动机构从而带动仿生脚进行抬脚运动后再进行放下进行运动,操作简单,仿生度高。
附图说明
[0017]
图1是本实用新型实施例的正面结构剖示图;
[0018]
图2是本实用新型实施例的图1中a的局部放大图;
[0019]
图3是本实用新型实施例的图1中b的局部放大图。
[0020]
附图标记说明:
[0021]
1、仿生腿;2、仿生脚;3、仿生身体;4、转轴;5、移动机构;6、第一齿轮;7、链条;8、电机;9、第二齿轮;10、固定架;11、滑槽;12、固定块;13、第一弹簧;14、移动块;15、固定杆;16、支撑块;17、支撑板;18、缓冲垫;19、加强筋;20、第二弹簧。
具体实施方式
[0022]
下面结合附图对本实用新型的实施例作进一步说明。
[0023]
实施例:
[0024]
如图1-图3所示,一种机械仿生恐龙腿部结构,包括仿生腿1与仿生身体3与仿生脚2,仿生脚2的内部固定连接有固定架10,固定架10的内部设置有滑槽11,滑槽11的内部固定连接有固定块12,滑槽11的内部且位于固定块12的侧壁固定连接第一弹簧13,第一弹簧13远离固定块12的一端固定连接有移动块14,移动块14底端固定连接有固定杆15,固定杆15倾斜设置,固定杆15远离移动块14的一端固定连接有支撑块16,支撑块16的底端固定连接有支撑板17,支撑板17的底端固定连接有加强筋19,加强筋19的底端固定连接有缓冲垫18,支撑板17的底端且位于加强筋19的外表面弹性连接有第二弹簧20。
[0025]
当仿生腿1进行运动时,由于仿生恐龙的体积较大,仿生脚2底部产生的压力较大
可能造成仿生腿1受损,当仿生腿1进行运动时,仿生脚2的压力通过缓冲垫18向下挤压第二弹簧20与加强筋19至支撑板17处,支撑板17感到压力带动支撑块16向下进行移动,支撑块16进行向下带动两根固定杆15进行运动,固定杆15进行挤压固定架10内部的滑槽11中的移动块14发生移动,移动块14进行挤压第一弹簧13至固定块12处进行缓冲压力与将第一弹簧13进行复位减少压力对仿生腿1的危害。
[0026]
在另外一个实施例中,仿生身体3的内部固定连接有电机8,电机8的输出端固定连接有第二齿轮9,通过设置有电机8方便进行带动第二齿轮9进行旋转,仿生脚2的内部活动连接有转轴4,转轴4的侧壁固定连接有第一齿轮6,第二齿轮9的正面活动连接有链条7,第一齿轮6与第二齿轮9通过链条7活动连接。
[0027]
通过设置有电机8与第一齿轮6与第二齿轮9与转轴4与链条7,可以通过电机8输出端的第一齿轮6旋转通过链条7带动第二齿轮9进行旋转,第二齿轮9带动转轴4进行旋转,转轴4旋转带动仿生腿1倾斜抬高。
[0028]
在另外一个实施例中,所述转轴4的正面固定连接有移动机构5,所述移动机构5的底端与固定架10的顶端固定连接。
[0029]
通过设置有移动机构5,通过转轴带动仿生腿1与移动机构5抬高倾斜,在通过移动机构5带动仿生脚2向前进行移动。
[0030]
在另外一个实施例中,缓冲垫18与固定块12的材料均为弹性橡胶材料制成,固定块12与第一弹簧13与移动块14的数量均为两个,用于加强缓冲压力的作用,防止压力过大导致仿生腿1发生损坏。
[0031]
在另外一个实施例中,加强筋19的数量有四个,且加强筋19的位置靠近缓冲垫18的四角处,第二弹簧20的一端与缓冲垫18弹性连接,加强缓冲垫18减压的能力。
[0032]
在另外一个实施例中,仿生腿1与仿生脚2与仿生身体3的材料均采用硅胶制成,增加了仿生恐龙的真实感。
[0033]
以上所述实施例仅表达了本实用新型的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips