
 商标分类
商标分类  商标转让
商标转让 
一种多用途物料搬运工业机器人的制作方法
 2021-02-07 09:02:39|
2021-02-07 09:02:39| 197|
197| 起点商标网
起点商标网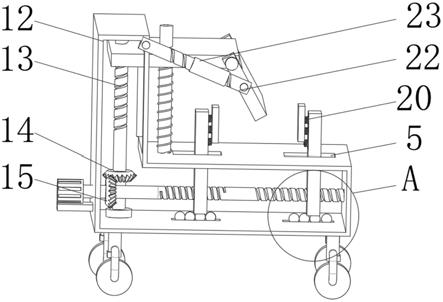
[0001]
本实用新型涉及工业机器人技术领域,具体来说,涉及一种多用途物料搬运工业机器人。
背景技术:
[0002]
工业机器人是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器,它可以接受人类指挥,也可以按照预先编排的程序运行,工业搬运机器人是用于工业领域物品的搬运,现有的工业搬运机器人在对物品进行夹持的后,进行搬运的过程中,由于颠簸,物品容易被颠出,且只能进行短距离的搬运,搬运距离较短。
[0003]
专利号为cn201721697859.8的一种搬运机器人,包括底座、旋转座、升降丝杆电机、升降座、限位板、气缸、推板和货叉,所述旋转座通过转轴与底座同轴固定,所述底座内设有驱动转轴转动的电机,所述升降丝杆电机固定在旋转座上,升降丝杆电机的螺母安装在升降座中,所述限位板为l型板,限位板固定在升降座上,所述气缸固定在升降座和限位板之间,所述推板与气缸的活塞杆连接,推板的上下端分别与限位板、升降座接触,活塞杆伸缩带动推板往复运动,所述货叉包括两个,货叉固定在推板上,货叉底部设有滑块,所述升降座上还设有滑槽,货叉底部的滑块位于滑槽内滑动,上述搬运机器人只是通过限位板,对物品的位置进行简单的限制,从而在搬运的过程中,如果机器人遇到不平整的地面,发生颠簸的时候,物品非常容易被颠出,且上述搬运机器人的底座没有设置移动结构,只是通过旋转座对物品进行搬运,从而搬运的范围仅限机器人附近,上述搬运机器人自身无法移动,搬运距离十分有限。
[0004]
针对相关技术中的问题,目前尚未提出有效的解决方案。
技术实现要素:
[0005]
针对相关技术中的问题,本实用新型提出一种多用途物料搬运工业机器人,以克服现有相关技术所存在的上述技术问题。
[0006]
本实用新型的技术方案是这样实现的:一种多用途物料搬运工业机器人,包括主体,所述主体的内部开设有“l”型空腔,所述“l”型空腔的一侧外壁上固定有电机,所述电机的输出轴上固定有第一螺纹杆,所述第一螺纹杆靠近电机的一端设置有第一锥齿轮,所述第一锥齿轮上设置有第二锥齿轮,所述第二锥齿轮上设置有第二螺纹杆,所述第二螺纹杆上设置有移动板,所述移动板上设置有压板,所述第一螺纹杆远离电机的另一端转动连接到“l”型空腔的内壁上,所述第一螺纹杆上设置有滑块,所述滑块贯穿主体并延伸到主体的上方,所述滑块上设置有凹槽,且凹槽内设置有伸缩杆和第二弹簧,所述伸缩杆远离滑块的另一端设置有夹板,所述主体的底端四角设置有万向轮。
[0007]
进一步,所述第一锥齿轮的内壁固定套设在第一螺纹杆上,所述第二锥齿轮啮合在第一锥齿轮的上方,所述第二锥齿轮的内壁固定套设在第二螺纹杆上,所述第二螺纹杆
的两端转动连接到“l”型空腔的上下内壁上。
[0008]
进一步,所述压板通过轴承和移动板转动连接,所述压板上通过轴承转动连接有第一螺杆,所述第一螺杆上螺纹连接有管套,所述管套的另一端螺纹连接有第二螺杆,所述第二螺杆的另一端转动连接到主体上,所述第一螺杆和第二螺杆表面的螺纹为相反螺纹。
[0009]
进一步,所述滑块有两个,关于第一螺纹杆的中点对称设置,两个所述滑块与第一螺纹杆螺纹连接,且两个所述滑块与第一螺纹杆连接处螺纹分别为正反螺纹,两个所述滑块贯穿主体处设置有第一滑槽。
[0010]
进一步,两个所述滑块的正下方均设置有若干个滚珠,所述滚珠的上端与滑块的下端接触,所述滚珠的下端与第二滑槽滑动连接。所述第二滑槽设置在“l”型空腔的底端内壁上。
[0011]
进一步,所述移动板上设置有导孔,所述导孔的内壁上活动套设有导柱,所述导柱的底端固定在主体的表面,所述导柱的外壁上套设有第一弹簧,所述第一弹簧的两端分别固定在移动板的下表面和主体的表面。
[0012]
本实用新型的有益效果为:使用该一种多用途物料搬运工业机器人时,首先启动电机,电机的输出轴带动第一螺纹杆转动,由于两个滑块设置在第一螺纹杆的正反螺纹上,从而在第一螺纹杆转动的时候,两个滑块始终同步的相向移动,进而使两个滑块相互靠近,在滑块移动的时候,滚珠可以减少滑块移动时受到的摩擦力,从而使滑块移动的更顺畅,再通过滑块上的夹板对物品的位置进行水平方向的固定,在第一螺纹杆转动时,固定在其上的第一锥齿轮同步转动,从而带动第二锥齿轮和第二螺纹杆转动,进而带动与第二螺纹杆螺接的移动板下降,再转动管套,由于第一螺杆和第二螺杆表面的螺纹为相反螺纹,所以管套转动时,第一螺杆和第二螺杆向外伸长,进而带动压板,对物品进行竖直方向的固定,本实用新型通过将两个滑块设置在第一螺纹杆的正反螺纹上,在第一螺纹杆转动的时候,两个滑块始终同步的相向移动,带动从而使两个滑块靠近或者远离,通过夹板对物品的位置进行固定,再转动管套,从而使压板下降,压紧物品的上端,解决了传统的搬运机器人发生颠簸时,物品容易被颠出的问题,本实用新型可以增加搬运时,物品的稳定性,本实用新型通过在主体的底端四角设置万向轮,从而可以使机器人快速的向各个方向移动,进而当需要将物品搬运到远距离外时,通过万向轮,实现物品的长距离搬运,解决了传统的搬运机器人只能将物品搬运到,以机械臂为半径的圆内,距离过短的问题,本实用新型可以通过机器人的搬运距离,对物品进行长距离稳定的搬运,本实用新型通过在滑块的底端设置滚珠,将滚珠设置在第二滑槽内,从而在滑块移动的时候,滚珠可以减少滑块移动时受到的摩擦力,进而使滑块移动的更顺畅,缩短对物品进行夹持所需要的时间,解决了传统的搬运机器人,对物品夹持时,消耗时间过长的问题,本实用新型可以快速的对物品进行夹持,从而提高搬运速率。
附图说明
[0013]
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0014]
图1是根据本实用新型实施例的整体外观立体图;
[0015]
图2是根据本实用新型实施例的内部结构图;
[0016]
图3是根据本实用新型实施例的局部放大图;
[0017]
图4是根据本实用新型实施例的爆炸视图。
[0018]
图中:
[0019]
1、主体;2、导柱;3、第二螺杆;4、第一弹簧;5、第一滑槽;6、电机;7、移动板;8、压板;9、夹板;10、滑块;11、万向轮;12、“l”型空腔;13、第二螺纹杆;14、第二锥齿轮;15、第一锥齿轮;16、第一螺纹杆; 17、第二滑槽;18、伸缩杆;19、滚珠;20、第二弹簧;21、导孔;22、第一螺杆;23、管套。
具体实施方式
[0020]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员所获得的所有其他实施例,都属于本实用新型保护的范围。
[0021]
根据本实用新型的实施例,提供了一种多用途物料搬运工业机器人。
[0022]
如图1-4所示,根据本实用新型实施例的一种多用途物料搬运工业机器人,包括主体1,所述主体1的内部开设有“l”型空腔12,所述“l”型空腔12的一侧外壁上固定有电机6,所述电机6的输出轴上固定有第一螺纹杆 16,所述第一螺纹杆16靠近电机6的一端设置有第一锥齿轮15,所述第一锥齿轮15上设置有第二锥齿轮14,所述第二锥齿轮14上设置有第二螺纹杆 13,所述第二螺纹杆13上设置有移动板7,所述移动板7上设置有压板8,所述第一螺纹杆16远离电机6的另一端转动连接到“l”型空腔12的内壁上,所述第一螺纹杆16上设置有滑块10,所述滑块10贯穿主体1并延伸到主体1的上方,所述滑块10上设置有凹槽,且凹槽内设置有伸缩杆18和第二弹簧20,所述伸缩杆18远离滑块10的另一端设置有夹板9,所述主体1 的底端四角设置有万向轮11。
[0023]
在一个实施例中,对于上述的第一锥齿轮15,所述第一锥齿轮15的内壁固定套设在第一螺纹杆16上,所述第二锥齿轮14啮合在第一锥齿轮15 的上方,所述第二锥齿轮14的内壁固定套设在第二螺纹杆13上,所述第二螺纹杆13的两端转动连接到“l”型空腔12的上下内壁上,从而在电机6 的输出轴带动第一螺纹杆16转动时,进而带动第二螺纹杆13转动,提高第二螺纹杆13转动速度。
[0024]
在一个实施例中,对于上述的压板8,所述压板8通过轴承和移动板7 转动连接,所述压板8上通过轴承转动连接有第一螺杆22,所述第一螺杆22 上螺纹连接有管套23,所述管套23的另一端螺纹连接有第二螺杆3,所述第二螺杆3的另一端转动连接到主体1上,所述第一螺杆22和第二螺杆3表面的螺纹为相反螺纹,从而转动管套23时,第一螺杆22和第二螺杆3向外伸长,进而带动压板8,对物品进行竖直方向的固定,提高搬运时,物品的稳定性。
[0025]
在一个实施例中,对于上述的滑块10,所述滑块10有两个,关于第一螺纹杆16的中点对称设置,两个所述滑块10与第一螺纹杆16螺纹连接,且两个所述滑块10与第一螺纹杆16连接处螺纹分别为正反螺纹,两个所述滑块10贯穿主体1处设置有第一滑槽5,从而在第一螺纹杆16转动的时候,两个滑块10始终同步的相向移动,进而使两个滑块10相互靠近,对
物品的位置进行固定,提高固定效率。
[0026]
在一个实施例中,对于上述的两个所述滑块10,两个所述滑块10的正下方均设置有若干个滚珠19,所述滚珠19的上端与滑块10的下端接触,所述滚珠19的下端与第二滑槽17滑动连接。所述第二滑槽17设置在“l”型空腔12的底端内壁上,从而在滑块10移动的时候,滚珠19可以减少滑块 10移动时受到的摩擦力,进而使滑块10移动的更顺畅,提高移动速度。
[0027]
在一个实施例中,对于上述的移动板7,所述移动板7上设置有导孔21,所述导孔21的内壁上活动套设有导柱2,所述导柱2的底端固定在主体1的表面,所述导柱2的外壁上套设有第一弹簧4,所述第一弹簧4的两端分别固定在移动板7的下表面和主体1的表面,从而在移动板7移动时,导柱2 通过移动板7上的导孔21对移动板7的运动轨迹进行限制,进而提高移动板 7移动的稳定性。
[0028]
综上所述,借助于本实用新型的上述技术方案,使用该一种多用途物料搬运工业机器人时,首先启动电机6,电机6的输出轴带动第一螺纹杆16转动,由于两个滑块10设置在第一螺纹杆16的正反螺纹上,从而在第一螺纹杆16转动的时候,两个滑块10始终同步的相向移动,进而使两个滑块10 相互靠近,在滑块10移动的时候,滚珠19可以减少滑块10移动时受到的摩擦力,从而使滑块10移动的更顺畅,再通过滑块10上的夹板9对物品的位置进行水平方向的固定,在第一螺纹杆16转动时,固定在其上的第一锥齿轮 15同步转动,从而带动第二锥齿轮14和第二螺纹杆13转动,进而带动与第二螺纹杆13螺接的移动板7下降,再转动管套23,由于第一螺杆22和第二螺杆3表面的螺纹为相反螺纹,所以管套23转动时,第一螺杆22和第二螺杆3向外伸长,进而带动压板8,对物品进行竖直方向的固定。
[0029]
有益效果:1、本实用新型通过将两个滑块设置在第一螺纹杆的正反螺纹上,在第一螺纹杆转动的时候,两个滑块始终同步的相向移动,带动从而使两个滑块靠近或者远离,通过夹板对物品的位置进行固定,再转动管套,从而使压板下降,压紧物品的上端,解决了传统的搬运机器人发生颠簸时,物品容易被颠出的问题,本实用新型可以增加搬运时,物品的稳定性。
[0030]
2、本实用新型通过在主体的底端四角设置万向轮,从而可以使机器人快速的向各个方向移动,进而当需要将物品搬运到远距离外时,通过万向轮,实现物品的长距离搬运,解决了传统的搬运机器人只能将物品搬运到,以机械臂为半径的圆内,距离过短的问题,本实用新型可以通过机器人的搬运距离,对物品进行长距离稳定的搬运。
[0031]
3、本实用新型通过在滑块的底端设置滚珠,将滚珠设置在第二滑槽内,从而在滑块移动的时候,滚珠可以减少滑块移动时受到的摩擦力,进而使滑块移动的更顺畅,缩短对物品进行夹持所需要的时间,解决了传统的搬运机器人,对物品夹持时,消耗时间过长的问题,本实用新型可以快速的对物品进行夹持,从而提高搬运速率。
[0032]
以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips