
 商标分类
商标分类  商标转让
商标转让 
一种永磁吸附足式爬壁机器人的制作方法
 2021-02-07 05:02:59|
2021-02-07 05:02:59| 332|
332| 起点商标网
起点商标网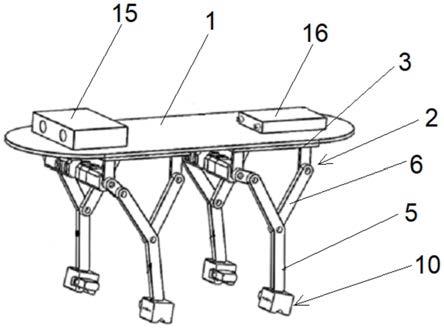
[0001]
本发明属于爬壁机器人技术领域,涉及一种永磁吸附足式爬壁机器人。
背景技术:
[0002]
当前对于大型船舶、石化储罐和风机塔筒等大型钢结构件的探伤作业主要是以人工进行探伤为主,传统的方法是搭建脚手架或者是采用高空作业平台进行人工探伤作业,工人在脚手架上或者高空作业平台上进行作业,虽然投资低,但是作业效率低下且危险度高。随着技术的进步,出现了一些半自动的作业方式,比如安装轨道,在作业效率上有所提升,但是前期准备时间长,对于非平面作业有较大的限制,因此,需要一种能够在这类壁面上稳定吸附,并且能够搭载其他探伤工具的爬壁机器人及爬壁机器人的控制系统。
技术实现要素:
[0003]
本发明针对现有技术存在的上述问题,提供一种永磁吸附足式爬壁机器人,本发明所要解决的技术问题是:如何实现机器人在钢结构壁面上行走。
[0004]
本发明的目的可通过下列技术方案来实现:
[0005]
一种永磁吸附足式爬壁机器人,包括机架,其特征在于,所述机架的下侧面设置有若干行走腿机构,所述行走腿机构包括支架、连杆、曲柄、支撑杆和驱动电机,所述支架固定连接于机架的下侧面,所述支架的两端分别设置有一个连接部,所述连杆的一端与支架一个连接部相铰接,所述连杆的另一端与曲柄的一个端部相铰接,所述曲柄设置有弯曲部,所述支撑杆的一端与支架的另一个连接部相铰接,所述支撑杆的另一端与曲柄的弯曲部相铰接,所述驱动电机安装于机架上,所述驱动电机的输出轴与连杆相固连,所述曲柄远离连杆的一端设置有磁力吸附装置。
[0006]
其工作原理是:启动驱动电机,由于连杆的一端与支架一个连接部相铰接,连杆的另一端与曲柄的一个端部相铰接,曲柄设置有弯曲部,支撑杆的一端与支架的另一个连接部相铰接,支撑杆的另一端与曲柄的弯曲部相铰接,驱动电机安装于机架上,驱动电机的输出轴与连杆相固连,驱动电机带动连杆摆动,同时带动曲柄摆动,设置于曲柄远离连杆的一端的磁力吸附装置随着曲柄的摆动进行移动。由于机架的下侧面设置有若干行走腿机构,行走时,部分行走腿机构上的磁力吸附装置吸附于壁面上,另一部分行走腿机构上的磁力吸附装置脱离壁面,并随着曲柄向前移动,该部分行走腿机构向前摆动后其上的磁力吸附装置吸附于壁面上,而原吸附于壁面的部分行走腿机构上的磁力吸附装置脱离壁面并随曲柄前移动,周而复始,实现本爬壁机器人在壁面上行走,从而可以在本爬壁机器人上搭载探伤工具进行探伤工作,大大提高工作效率。
[0007]
在上述的一种永磁吸附足式爬壁机器人中,所述磁力吸附装置包括安装座和永磁体,所述安装座固定连接于曲柄远离连杆的一端,所述永磁体安装于安装座上。
[0008]
在上述的一种永磁吸附足式爬壁机器人中,所述磁力吸附装置还包括旋转件和扭力舵机,所述旋转件固定连接于永磁体上,所述扭力舵机的输出轴与旋转件相连接。
[0009]
在上述的一种永磁吸附足式爬壁机器人中,所述旋转件为联接轴,所述联接轴固定连接于永磁体上,所述扭力舵机的输出轴与联接轴相连接。
[0010]
在上述的一种永磁吸附足式爬壁机器人中,所述爬壁机器人还包括控制器,所述控制器安装于机架的上侧面。
[0011]
在上述的一种永磁吸附足式爬壁机器人中,所述爬壁机器人还包括蓄电池,所述蓄电池安装于机架的上侧面,所述蓄电池与控制器、驱动电机和扭力舵机均电性连接。
[0012]
优选的,所述行走腿机构的数量为4个,位于对角线的两个行走腿机构的步调相一致。
[0013]
与现有技术相比,本发明的优点如下:
[0014]
1、本爬壁机器人的部分行走腿机构上的磁力吸附装置吸附于壁面上,另一部分行走腿机构上的磁力吸附装置脱离壁面,并随着曲柄向前移动,该部分行走腿机构向前摆动后其上的磁力吸附装置吸附于壁面上,而原吸附于壁面的部分行走腿机构上的磁力吸附装置脱离壁面并随曲柄前移动,周而复始,实现本爬壁机器人在壁面上行走,从而可以在本爬壁机器人上搭载探伤工具进行探伤工作,大大提高工作效率。
[0015]
2、通过设置扭力舵机,实现磁力吸附装置吸附或脱离壁面,方便本爬壁机器人的行走。
[0016]
3、通过设置控制器,控制驱动电机和扭力舵机,使得本爬壁机器人行走时步调一致。
附图说明
[0017]
图1是本爬壁机器人的结构示意图;
[0018]
图2是行走腿机构的结构图;
[0019]
图3是磁力吸附装置的结构示意图。
[0020]
图中,1、机架;2、行走腿机构;3、支架;4、连杆;5、曲柄;6、支撑杆;7、驱动电机;8、连接部;9、弯曲部;10、磁力吸附装置;11、安装座; 12、永磁体;14、扭力舵机;15、控制器;16、蓄电池。
具体实施方式
[0021]
以下是本发明的具体实施例,并结合附图对本发明的技术方案作进一步的描述,但本发明并不限于这些实施例。
[0022]
如图1-2所示,本爬壁机器人包括机架1,机架1的下侧面设置有若干行走腿机构2,行走腿机构2包括支架3、连杆4、曲柄5、支撑杆6和驱动电机7,支架3固定连接于机架1的下侧面,支架3的两端分别设置有一个连接部8,连杆4的一端与支架3一个连接部8相铰接,连杆4的另一端与曲柄5的一个端部相铰接,曲柄5设置有弯曲部9,支撑杆6的一端与支架3的另一个连接部8 相铰接,支撑杆6的另一端与曲柄5的弯曲部9相铰接,驱动电机7安装于机架1上,驱动电机7的输出轴与连杆4相固连,曲柄5远离连杆4的一端设置有磁力吸附装置10。
[0023]
启动驱动电机7,由于连杆4的一端与支架3一个连接部8相铰接,连杆4 的另一端与曲柄5的一个端部相铰接,曲柄5设置有弯曲部9,支撑杆6的一端与支架3的另一个连接部
8相铰接,支撑杆6的另一端与曲柄5的弯曲部9相铰接,驱动电机7安装于机架1上,驱动电机7的输出轴与连杆4相固连,驱动电机7带动连杆4摆动,同时带动曲柄5摆动,设置于曲柄5远离连杆4的一端的磁力吸附装置10随着曲柄5的摆动进行移动。由于机架1的下侧面设置有若干行走腿机构2,行走时,部分行走腿机构2上的磁力吸附装置10吸附于壁面上,另一部分行走腿机构2上的磁力吸附装置10脱离壁面,并随着曲柄5 向前移动,该部分行走腿机构2向前摆动后其上的磁力吸附装置10吸附于壁面上,而原吸附于壁面的部分行走腿机构2上的磁力吸附装置10脱离壁面并随曲柄5前移动,周而复始,实现本爬壁机器人在壁面上行走,从而可以在本爬壁机器人上搭载探伤工具进行探伤工作,大大提高工作效率。
[0024]
如2-3图所示,本实施例中,磁力吸附装置10包括安装座11和永磁体12,安装座11固定连接于曲柄5远离连杆4的一端,永磁体12安装于安装座11上。该结构中,磁力吸附装置10包括安装座11和永磁体12,永磁体12能够使得本爬壁机器人牢靠地吸附在壁面上。
[0025]
如图2-3所示,本实施例中,磁力吸附装置10还包括旋转件和扭力舵机14,旋转件固定连接于永磁体12上,扭力舵机14的输出轴与旋转件相连接。该结构中,旋转件固定连接于永磁体12上,扭力舵机14的输出轴与旋转件相连接,当需要将磁力吸附装置10脱离壁面时,启动扭力舵机14带动永磁体12转动,使得永磁体12与壁面之间的磁力慢慢减小,永磁体12最终脱离壁面,当需要磁力吸附装置10吸附壁面时,扭力舵机14带动永磁体12反转,使得永磁体12 与壁面之间的磁力慢慢增加,永磁体12最终吸附壁面。
[0026]
作为一种优选实施例,旋转件为联接轴,联接轴固定连接于永磁体12上,扭力舵机14的输出轴与联接轴相连接。作为其他实施例,旋转件还可以是其他类型的轴类零件,旋转件传递扭力舵机的扭矩到永磁体12,带动永磁体12转动,从而可以改变永磁体12磁力的方向。
[0027]
如图1所示,本实施例中,爬壁机器人还包括控制器15,控制器15安装于机架1的上侧面。该结构中,驱动电机7和扭力舵机14分别与控制器15电连接,控制器15用于控制本爬壁机器人的驱动电机7和扭力舵机14,使得本爬壁机器人行走时步调一致,并控制本爬壁机器人对壁面的探伤工作。
[0028]
如图1所示,本实施例中,爬壁机器人还包括蓄电池16,蓄电池16安装于机架1的上侧面,蓄电池16与控制器15、驱动电机7和扭力舵机14均电性连接。
[0029]
如图1所示,本实施例中,行走腿机构2的数量为4个,位于对角线的两个行走腿机构2的步调相一致。该结构中,行走腿机构2的数量为4个,位于对角线的两个行走腿机构2的步调相一致,本爬壁机器人行走时,通过扭力舵机14控制位于对角线的一对行走腿机构2的磁力吸附装置10,使其吸附于壁面上,通过扭力舵机14控制位于对角线的另一对行走腿机构2的磁力吸附装置10,使其脱离壁面,再通过控制脱离壁面的行走腿机构2的驱动电机7,使其向前摆动,该对行走腿机构2同时向前移动,控制该对行走腿机构2的扭力舵机14,使其吸附于壁面上,周而复始,本爬壁机器人能够在壁面上平稳行走。
[0030]
本文中所描述的具体实施例仅仅是对本发明精神作举例说明。本发明所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,但并不会偏离本发明的精神或者超越所附权利要求书所定义的范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips