
 商标分类
商标分类  商标转让
商标转让 
一种独立转向装置及使用该装置的前轮转向系统的制作方法
 2021-02-07 05:02:40|
2021-02-07 05:02:40| 273|
273| 起点商标网
起点商标网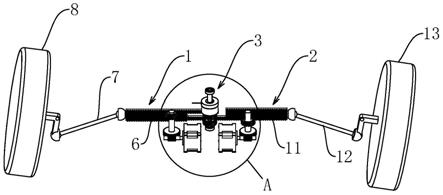
[0001]
本发明涉及汽车转向的技术领域,尤其是涉及一种独立转向装置及使用该装置的前轮转向系统。
背景技术:
[0002]
转向系统是汽车上重要的安全及操纵装置,其性能好坏直接关系到汽车的操纵稳定性和乘员的乘坐舒适性。优秀的转向系统不仅能够最大程度地保证乘员和行人的人身安全,而且能带给驾驶者良好的驾驶体验。从汽车诞生至今,汽车转向系统经历了:传统纯机械式转向系统、液压助力转向系统、电子液压助力转向系统和电动助力转向系统。目前,电动助力转向系统已经在乘用车上得到普及。近年来,前轮主动转向技术、线控转向技术等先进汽车转向技术已经成为各大厂商和和科研院所的研究热点。目前,前轮主动转向系统已经由宝马公司推出,而线控转向系统则由日产公司推出,表明这些先进的汽车转向技术正在被逐步推向产业化。全轮独立驱动-独立转向车辆是近年来国际汽车界发展的一种新型车辆,它取消了传统车辆中连接左右车轮的车轴,代之以新颖的车轮独立驱动-制动-转向机构,使车辆获得了驱动冗余,实现了车辆小转弯半径转向。每个车轮均可根据路面的条件变化而独立确定最佳纵向滑移率和最佳偏角工作点,从而提供最佳的纵向和侧向控制力。
[0003]
现有的授权公告号为cn102030007b的发明专利公开了一种独立驱动-独立转向车辆整车动力学控制量的获得方法。该技术方案中通过采集方向盘转角、加速踏板开度角、制动踏板开度角等驾驶员驾驶操作数据,采集车辆运动学、动力学基本信息,结合信息融合的方法获得车辆整车动力学控制所需的车辆状态信息数据。然后根据数据构建车辆驾驶专家模式库,生成整车动力学控制目标期望值,再根据整车动力学控制量的可行性进行判断、处理,获得整车动力学控制量。该技术方案让四轮独立转向的控制算法得以实现。
[0004]
名称为“线控四轮独立驱动轮毂电机电动汽车稳定性与节能控制研究”的论文中公开了基于路面识别的asr控制策略,该控制策略根据轮速、纵向加速度、侧向加速度和驱动力矩来计算路面附着系数,并根据路面附着系数和车辆行驶状态来分别控制每个车轮。
[0005]
上述的独立转向系统存在以下技术缺陷:由于每个轮子独立控制转向,因此四轮转向相互不干涉。当车辆在不平整路面上沿直线行驶,车辆振动颠簸或侧向风干扰时会对独立转向机构的控制产生影响,且由于独立转向机构无转向梯形机构,左右车轮的阿克曼关系无法严格保证,导致左右车轮转角控制的一致性变差,并导致车辆的直线行驶的方向稳定性变差。
技术实现要素:
[0006]
针对现有技术存在的不足,本发明的其中一个目的是提供一种独立转向装置,其优势在于实现左右轮独立转向的同时具有良好的直线行驶稳定性。
[0007]
本发明的上述发明目的是通过以下技术方案得以实现的:一种独立转向装置,包括第一转向执行机构、第二转向执行机构,还包括控制第一转向执行机构和第二转向执行
机构在联动状态和非联动状态之间切换的联动机构。
[0008]
通过采用上述技术方案,通过第一转向执行机构和第二转向执行机构来分别单独控制汽车左右轮的转向。每个车轮均可根据路面的条件变化而独立确定最佳偏角,从而提供最佳的纵向和侧向控制力。当车辆在均匀附着系数路面行驶时,可以通过联动机构控制第一转向执行机构和第二转向执行机构,使得左右轮处于同步转向的状态,不会出现沿直线行驶时左右轮偏转方向不一致和偏转量不协调的情况;而当车辆在分离附着系数路面转弯行驶时,左右侧车轮会根据路面附着系数的不同各自独立地偏转合适的角度;在低附着系数路面实施制动时,左右侧车轮会反向偏转,进行辅助制动。因此,本转向装置具有提升车辆行驶稳定性和在低附着路面缩短制动距离的作用。
[0009]
本发明在一较佳示例中可以进一步配置为:所述第一转向执行机构包括第一驱动件、被第一驱动件驱动着转动的第一输出齿轮、与第一输出齿轮啮合的第一转向齿条,第一转向齿条的左端转动连接有第一传动杆,第一传动杆远离第一转向齿条的一端转动连接有左侧车轮组件;所述第二转向执行机构包括第二驱动件、被第二驱动件驱动着转动的第二输出齿轮、与第二输出齿轮啮合的第二转向齿条,第二转向齿条的右端转动连接有第二传动杆,第二传动杆远离第二转向齿条的一端转动连接有右侧车轮组件。
[0010]
通过采用上述技术方案,第一驱动件带动第一输出齿轮转动,第二驱动件带动第二输出齿轮转动,第一输出齿轮和第二输出齿轮齿轮转动的过程中带动第一转向齿条和第二转向齿条移动,经过第一传动杆和第二传动杆传递动力后最终带动两侧的车轮组件转动,实现两侧车轮组件的分别转向。
[0011]
本发明在一较佳示例中可以进一步配置为:所述联动机构包括位于第一转向执行机构和第二转向执行机构之间的传动轴,传动轴上安装有电磁离合器,所述电磁离合器包括电磁线圈、驱动鼓、主动盘和从动盘,所述主动盘通过驱动鼓与传动轴固定连接,所述从动盘上连接有与第一转向齿条啮合的第一联动齿轮,传动轴上连接有与第二转向齿条啮合的第二联动齿轮。
[0012]
通过采用上述技术方案,通过电磁离合器的主动盘和从动盘的吸合与分离来实现第一联动齿轮和第二联动齿轮的同步与不同步两种状态。当第一联动齿轮和第二联动齿轮同步时,两侧车轮组件同步转向,当第一联动齿轮和第二联动齿轮不同步时,两侧车轮组件各自分别转向。
[0013]
本发明在一较佳示例中可以进一步配置为:所述第二驱动件包括行星齿轮驱动组件以及协同控制行星齿轮驱动组件输出转向的方向盘和驱动电机。
[0014]
通过采用上述技术方案,通过驱动电机和方向盘协同控制行星齿轮输出扭矩控制车轮转向。当车辆处于低速行驶状态时,驱动电机会辅助放大方向盘输入的旋转角度,使得驾驶员可以在低速状态下较为方便地操作车辆大角度转向;当车辆处于高速行驶状态时,驱动电机会辅助减小方向盘输入的旋转角度,避免车辆高速状态下转向角度过大而发生危险。
[0015]
本发明的另一个目的是提供一种前轮转向系统,其优势在于具有较好的直线行驶稳定性。
[0016]
本发明的上述发明目的是通过以下技术方案得以实现的:一种前轮转向系统,包括方向盘和路感电机,方向盘的转动轴上固设有蜗轮,路感电机的输出轴上固设有与蜗轮
啮合的蜗杆,还包括上述不使用行星齿轮驱动组件的独立转向装置。
[0017]
通过采用上述技术方案,通过独立转向装置使得每个车轮均可根据路面的条件变化而独立确定最佳偏角,从而提供最佳的纵向和侧向控制力。当车辆沿直线行驶时,可以通过联动机构控制第一转向执行机构和第二转向执行机构,使得左右轮处于同步转向的状态,提升转向装置的直线行驶稳定性。
[0018]
本发明在一较佳示例中可以进一步配置为:具有独立转向模式、非独立转向模式和辅助制动模式;切换至非独立转向模式时,电磁离合器吸合;切换至独立转向模式或辅助制动模式时,电磁离合器不吸合,电磁离合器的主动盘和从动盘分离。
[0019]
通过采用上述技术方案,通过三种不同模式的切换来辅助车辆沿直线稳定行驶、转向、制动,使得驾驶员获得良好的驾驶体验。
[0020]
本发明在一较佳示例中可以进一步配置为:处于非独立转向模式时,主控制器综合驾驶员驾驶操作数据以及车辆状态信息数据计算出第一驱动件应该输出的旋转角度,将角度信息发送给第一驱动件的控制器,第一驱动件驱动左侧车轮组件和右侧车轮组件执行同步转向;处于独立转向模式时,主控制器综合驾驶员驾驶操作数据以及车辆状态信息数据计算出第一驱动件和第二驱动件应该输出的旋转角度,将角度信息分别发送给第一驱动件和第二驱动件的控制器,第一驱动件和第二驱动件分别驱动左侧车轮组件、右侧车轮组件完成独立转向;处于辅助制动模式时,主控制器根据车辆状态信息数据计算出所需的制动前束角或前张角,将角度信息分别发送给第一驱动件和第二驱动件的控制器,第一驱动件和第二驱动件分别驱动左侧车轮组件、右侧车轮组件前束或前张,以完成辅助制动。
[0021]
通过采用上述技术方案,处于独立转向模式时,主控制器综合驾驶员驾驶操作数据以及车辆状态信息数据控制左侧车轮组件和右侧车轮组件同步转向。处于非独立转向模式时,主控制器控制左侧车轮组件和右侧车轮组件独立转向。处于辅助制动模式时,左侧车轮组件和右侧车轮组件前束或前张,从而实施辅助制动。
[0022]
本发明在一较佳示例中可以进一步配置为:第一驱动件和第二驱动件工作时,会将实际输出转角以及工作电流反馈给各自的控制器,再根据主控制器提供的目标转角对电机实际转角进行修正,同时第一驱动件和第二驱动件的电流也会反馈到主控制器,主控制器再将电流信息发送至路感电机,路感电机控制器综合方向盘转角数据和执行电机电流数据,控制路感电机产生模拟路感。
[0023]
通过采用上述技术方案,通过路感电机配合蜗轮蜗杆机构模拟路感,使得驾驶员操作方向盘转向时能够根据模拟的路感进行反馈调节,便于驾驶员操作。
[0024]
本发明的还有一个目的是提供一种使用行星齿轮组件的前轮转向系统。
[0025]
本发明的上述发明目的是通过以下技术方案得以实现的:一种前轮转向系统,包括使用上述行星齿轮组件的独立转向装置。
[0026]
通过采用上述技术方案,通过独立转向装置使得每个车轮均可根据路面的条件变化而独立确定最佳偏角,从而提供最佳的纵向和侧向控制力。当车辆沿直线行驶时,可以通
过联动机构控制第一转向执行机构和第二转向执行机构,使得左右轮处于同步转向的状态,提升转向装置的直线行驶稳定性。同时独立转向装置能够根据车速的快慢对转角大小进行适应性调整。
[0027]
本发明在一较佳示例中可以进一步配置为:具有独立转向模式、非独立转向模式和辅助制动模式;处于非独立转向模式时,方向盘转动,主控制器根据车辆状态信息数据计算出非独立转向的叠加转角,控制第二驱动件执行非独立主动转向;处于独立转向模式时,主控制器根据车辆状态信息数据计算出两转向轮各自需要的叠加转角,并分别向第一驱动件、第二驱动件发送控制信号,使之根据计算得到的叠加转角控制左侧车轮组件和右侧车轮组件完成独立转向;处于辅助制动模式时,根据车辆状态信息数据计算出所需的制动前束角或前张角,并分别向第一驱动件、第二驱动件发送控制信号,控制左侧车轮组件和右侧车轮组件前束或前张,以完成辅助制动。
[0028]
通过采用上述技术方案,处于非独立转向模式时,主控制器根据车辆状态信息计算出叠加转角辅助转向。处于独立转向模式时,主控制器计算得到第一驱动件驱动左侧车轮组件的转角和对右侧车轮组件的叠加转角来控制两侧车轮组件独立转向。处于辅助制动模式时,控制两侧车轮前束来辅助制动。
[0029]
综上所述,本发明包括以下至少一种有益技术效果:1.独立转向模式时,每个车轮均可根据路面的条件变化而独立确定最佳偏角,从而提供最佳的纵向和侧向控制力;2.非独立转向模式时,可以通过联动机构控制第一转向执行机构和第二转向执行机构,使得左右轮处于同步转向的状态,不会出现在附着系数均匀路面上行驶时左右轮偏转方向不一致和偏转量不协调的情况,提升安装该转向装置的车辆的直线行驶稳定性;3.当车辆在低附着系数路面上进行制动时,可以通过第一转向执行机构和第二转向执行机构使左右侧车辆前束或前张,从而进行辅助制动;4.当第一转向执行机构和第二转向执行机构中的一个出现故障时,转向系统仍然能够在另一转向执行机构的驱动下正常运行(切换至非独立转向模式),保证了转向系统的可靠性和汽车行驶的安全性。
附图说明
[0030]
图1是实施例一的结构示意图;图2是图1中a处的放大图;图3是实施例一中联动机构的剖视示意图;图4是实施例二的结构示意图;图5是实施例三的结构示意图;图6是实施例三中的独立转向装置处于非独立转向模式的示意图;图7是实施例三中的独立转向装置处于独立转向模式的示意图;图8是实施例三中的独立转向装置处于辅助制动模式时车轮组件前束的示意图;图9是实施例三中的独立转向装置处于辅助制动模式时车轮组件前张的示意图。
[0031]
附图标记:1、第一转向执行机构;2、第二转向执行机构;3、联动机构;4、第一驱动件;5、第一输出齿轮;6、第一转向齿条;7、第一传动杆;8、左侧车轮组件;9、第二驱动件;10、第二输出齿轮;11、第二转向齿条;12、第二传动杆;13、右侧车轮组件;14、传动轴;15、电磁离合器;16、主动盘;17、从动盘;18、第一联动齿轮;19、第二联动齿轮;20、行星齿轮驱动组件;21、方向盘;22、驱动电机;23、路感电机;24、蜗轮;25、蜗杆;26、电磁线圈;27、驱动鼓。
具体实施方式
[0032]
以下结合附图对本发明作进一步详细说明。
[0033]
实施例一:如图1所示,一种独立转向装置,包括第一转向执行机构1、第二转向执行机构2以及控制第一转向执行机构1和第二转向执行机构2在联动状态和非联动状态之间切换的联动机构3。
[0034]
如图1和图2所示,第一转向执行机构1包括第一驱动件4、被第一驱动件4驱动着转动的第一输出齿轮5、与第一输出齿轮5啮合的第一转向齿条6,第一转向齿条6的左端转动连接有第一传动杆7,第一传动杆7远离第一转向齿条6的一端转动连接有左侧车轮组件8。
[0035]
如图1和图2所示,第二转向执行机构2包括第二驱动件9、被第二驱动件9驱动着转动的第二输出齿轮10、与第二输出齿轮10啮合的第二转向齿条11,第二转向齿条11的右端转动连接有第二传动杆12,第二传动杆12远离第二转向齿条11的一端转动连接有右侧车轮组件13。
[0036]
本实施例中,第一驱动件4和第二驱动件9均由电机驱动减速机构作动。
[0037]
如图2和图3所示,联动机构3包括位于第一转向执行机构1和第二转向执行机构2之间的传动轴14,传动轴14上安装有电磁离合器15,电磁离合器15包括电磁线圈26、驱动鼓27、主动盘16、从动盘17。电磁离合器15的主动盘16与驱动鼓27通过花键连接,而驱动鼓27与传动轴14键连接,传动轴14转动时通过驱动鼓27带动主动盘16一起转动。电磁离合器15的从动盘17与套设在传动轴14上的第一联动齿轮18通过花键连接。与从动盘17花键连接的第一联动齿轮18与第一转向齿条6啮合,连接在传动轴14上的第二联动齿轮19与第二转向齿条11啮合。当电磁离合器15吸合时,从动盘17随着主动盘16一起转动,第一联动齿轮18和第二联动齿轮19同步转动,左侧车轮组件8与右侧车轮组件13由第一驱动件4驱动执行非独立转向动作;当电磁离合器15不吸合时,主动盘16和从动盘17独立转动,左侧车轮组件8与右侧车轮组件13分别由第一驱动件4和第二驱动件9单独驱动执行独立转向动作。
[0038]
实施例二:如图4所示,一种独立转向装置,和实施例一的区别仅在于,第二驱动件9包括行星齿轮驱动组件20以及协同控制行星齿轮驱动组件20输出转向的方向盘21和驱动电机22。第二驱动件9的结构和传动原理与bmw的主动转向系统相同(具体可参照授权公告号为cn106573639b的发明专利),当车辆处于低速行驶状态时,驱动电机22会辅助放大方向盘21输入的旋转角度,使得驾驶员可以在低速状态下较为方便地操作车辆大角度转向;当车辆处于高速行驶状态时,驱动电机22会辅助减小方向盘21输入的旋转角度,避免车辆高速状态下转向角度过大而发生危险。
[0039]
实施例三:
如图5所示,一种使用实施例一所述的独立转向装置的前轮转向系统,包括方向盘21和路感电机23。方向盘21的转动轴上固定有蜗轮24,并通过蜗轮24与路感电机23的输出轴上的蜗杆25啮合。路感电机给方向盘21施加阻力矩以模拟路感。系统具有独立转向模式、非独立转向模式和辅助制动模式。
[0040]
如图6所示,图中箭头方向为车辆行驶方向。切换至非独立转向模式时,电磁离合器15吸合,第一联动齿轮18和第二联动齿轮19同步转动,与第一联动齿轮18、第二联动齿轮19啮合的第一转向齿条6、第二转向齿条11同步运动。主控制器再综合驾驶员驾驶操作数据以及车辆状态信息数据计算出第一驱动件4应该输出的旋转角度,将角度信息发送给第一驱动件4的控制器,第一驱动件4驱动左侧车轮组件8和右侧车轮组件13执行非独立转向。第二驱动件9在非独立转向模式下作为第一驱动件4的冗余驱动件,提高系统可靠性。
[0041]
如图7所示,切换至独立转向模式时,电磁离合器15不吸合,第一联动齿轮18和第二联动齿轮19独立转动,第一转向齿条6和第二转向齿条11独立运动。主控制器综合驾驶员驾驶操作数据以及车辆状态信息数据计算出第一驱动件4和第二驱动件9应该输出的旋转角度,将角度信息分别发送给第一驱动件4和第二驱动件9的控制器,第一驱动件4和第二驱动件9分别驱动左侧车轮组件8、右侧车轮组件13完成独立转向。
[0042]
如图8和图9所示,切换至辅助制动模式时,电磁离合器15不吸合,第一联动齿轮18和第二联动齿轮19独立转动,第一转向齿条6和第二转向齿条11独立运动。主控制器根据车辆状态信息数据计算出所需的制动前束角或前张角,将角度信息分别发送给第一驱动件4和第二驱动件9的控制器,第一驱动件4和第二驱动件9分别驱动左侧车轮组件8、右侧车轮组件13前束或前张制动。
[0043]
第一驱动件4和第二驱动件9工作时,会将实际输出转角以及工作电流反馈给各自的控制器,控制器再根据主控制器提供的目标转角对电机实际转角进行修正,同时第一驱动件4和第二驱动件9的电流也会反馈到主控制器,主控制器再将电流信息发送至路感电机23,路感电机23控制器综合方向盘21转角数据和执行电机电流数据,控制路感电机23产生模拟路感。
[0044]
实施例四:一种使用实施例二所述的独立转向装置的前轮转向系统,具有独立转向模式、非独立转向模式和辅助制动模式。
[0045]
切换至非独立转向模式时,电磁离合器15吸合,第一联动齿轮18和第二联动齿轮19同步转动,第一转向齿条6和第二转向齿条11同步运动。方向盘21驱动转动左侧车轮组件8、右侧车轮组件13转向时,主控制器根据车辆状态信息数据计算出非独立转向的叠加转角,控制第二驱动件9执行非独立主动转向。第一驱动件4在非独立转向模式下作为冗余驱动件。
[0046]
切换至独立转向模式时,电磁离合器15不吸合,第一联动齿轮18和第二联动齿轮19独立转动,第一转向齿条6和第二转向齿条11独立运动。主控制器根据车辆状态信息数据计算出两转向轮各自需要的叠加转角,并分别向第一驱动件4、第二驱动件9发送控制信号,使之根据计算得到的叠加转角控制左侧车轮组件8和右侧车轮组件13完成独立转向。
[0047]
切换至辅助制动模式时,电磁离合器15不吸合,第一联动齿轮18和第二联动齿轮19独立转动,第一转向齿条6和第二转向齿条11独立运动。根据车辆状态信息数据计算出所
需的制动前束角或前张角,并分别向第一驱动件4、第二驱动件9发送控制信号,控制左侧车轮组件8和右侧车轮组件13前束或前张以完成辅助制动。
[0048]
本具体实施方式的实施例均为本发明的较佳实施例,并非依此限制本发明的保护范围,故:凡依本发明的结构、形状、原理所做的等效变化,均应涵盖于本发明的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips