
 商标分类
商标分类  商标转让
商标转让 
一种轨道巡检系统的制作方法
 2021-02-04 07:02:03|
2021-02-04 07:02:03| 277|
277| 起点商标网
起点商标网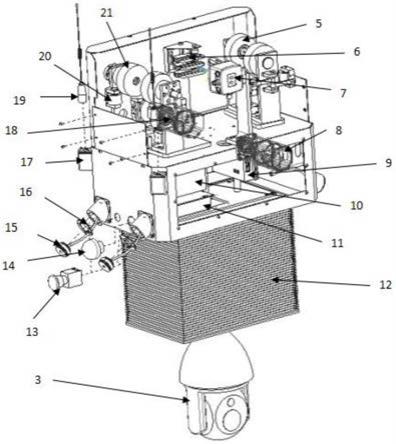
[0001]
本实用新型涉及巡检机器人技术领域,具体涉及一种轨道巡检系统。
背景技术:
[0002]
随着科学技术的不断发展,轨道式机器人成为了机器人的一个新兴发展领域,主要应用于电力、化工、轨道管廊、隧道挖掘等产业属于危险作业机器人的一个分支,具有危险作业机器人的特点。轨道式可移动监控机器人主要针对于大中型工矿企业现场工作环境恶劣,对设备运行状况需要随时了解目的而开发的。具有减低劳动强度,改善操作环境,降低工作风险,提高工作空间,同时相比于人工巡检方式还具有较强的性价比,为设备管理提高自动化水平,降低管理过程中的运做成本、提高生产效率。因此得到了广泛的推广应用。
[0003]
然而现有的轨道巡检机器人虽然实现了实时的监测,但对于发生突发情况的具体地点仍然要靠后台人员通过分析巡检机器人发送的图像进行位置的确定,这样就浪费了很多宝贵的时间降低了事故处理的效率。
技术实现要素:
[0004]
有鉴于此,本实用新型的目的在于提供一种轨道巡检系统,以准确确定轨道机器人的位置提高事故及时处理的效率。
[0005]
为实现以上目的,本实用新型采用如下技术方案:
[0006]
一种轨道巡检系统,包括:轨道、车体和控制平台;
[0007]
所述轨道的横截面为呈工字形;
[0008]
所述车体的上方设有所述轨道的容纳空间,在所述容纳空间的位于所述轨道两侧的所述车体上分别设有两个滚轮,两侧的四个所述滚轮将所述轨道合抱住,使所述车体悬挂在所述轨道上,并在所述车体内的第一驱动电机驱动所述滚轮转动时使所述车体沿所述轨道运动;
[0009]
所述轨道和所述滚轮相对任一侧设有印刷有标识码的标识条,所述车体内设有读码器用于读取所述标识条中所包含的距离信息,并将所述距离信息发送至所述控制平台;
[0010]
所述车体的下方设有双光球机用于获取行进路上的图像信息,并实时发送至所述控制平台。
[0011]
进一步地,所述车体上还设有限位轮,所述限位轮设置于和所述滚轮中心轴相垂直的位置用于将所述车体限定在所述轨道上。
[0012]
进一步地,所述车体上还设有滑触线触头用于和获取沿所述轨道设置的电源线连接为所述车体提供所需电力。
[0013]
进一步地,所述轨道巡检系统还包括:升降部,所述双光球机通过所述升降部和所述车体连接,并在所述车体的控制下实现所述双光球机的升降控制。
[0014]
进一步地,所述轨道巡检系统还包括:激光测距传感器,所述激光测距传感器设置于所述车体上用于探测所述车体前方的障碍物。
[0015]
进一步地,所述轨道巡检系统还包括:温湿度传感器,所述温湿度传感器设置于所述车体中用于探测温湿度信息,并发送至所述控制平台。
[0016]
进一步地,所述轨道巡检系统还包括:有害气体传感器,所述有害气体传感器设置于车体上用于探测有害气体并将探测结果发送至所述控制平台。
[0017]
进一步地,所述轨道巡检系统还包括:指示灯,所述指示灯设置于所述车体上用于指示所述车体的运转状态。
[0018]
进一步地,所述升降部包括:第二驱动电机和升降架,所述第二驱动电机设置于所述车体内,所述升降架设置于所述车体的底部用于固定所述双光球机,所述第二驱动电机用于驱动所述升降架的升降。
[0019]
进一步地,所述轨道巡检系统还包括:急停开关,所述急停开关设置于所述车体上用于所述车体的急停控制。
[0020]
本实用新型采用的一种轨道巡检系统,通过在车体的上方设有轨道的容纳空间,在容纳空间的位于轨道两侧的车体上分别设有两个滚轮,两侧的四个滚轮将轨道合抱住,使车体悬挂在所述轨道上,并在车体内的第一驱动电机驱动滚轮转动时使车体延轨道运动;可实现轨道巡检车体的日常运行;轨道和滚轮相对任一侧设有印刷有标识码的标识条,车体内设有读码器用于读取标识条中所包含的距离信息,并将距离信息发送至控制平台;使控制平台能够实时接收到巡检车体的位置信息,从而提高了车体位置的判定时间,在现场发生事故时能够提高事故处理的效率。
附图说明
[0021]
为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0022]
图1是本实用新型实施例提供的巡检系统的整体视图;
[0023]
图2是本实用新型实施例提供的巡检系统的俯视图;
[0024]
图3是本实用新型实施例提供的车体的结构图;
[0025]
图4是本实用新型实施例提供的车体的侧视图;
[0026]
图5是本实用新型实施例提供的车体的正视图。
[0027]
图中1-车体;2-轨道;3-双球光机;4-标识条;5-从动轮;6-滑触线触头;7-读码器;8-第二驱动电机;9-伺服驱动器;10-控制盒;11-通道;12-升降部;13-急停开关;14-指示灯;15-激光测距传感器;16-传感器安装座;17-天线座;18-第一驱动电机;19-天线;20-限位轮;21-主动轮。
具体实施方式
[0028]
为使本实用新型的目的、技术方案和优点更加清楚,下面将对本实用新型的技术方案进行详细的描述。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本实用新型所保护的范围。
[0029]
参照图1至图3所示,本实用新型的实施例提供了一种轨道巡检系统,包括:轨道2、车体1和控制平台;
[0030]
轨道2的横截面为呈工字形;
[0031]
车体1的上方设有轨道2的容纳空间,在容纳空间的位于轨道2两侧的车体1上分别设有两个滚轮,两侧的四个滚轮将轨道2合抱住,使车体1悬挂在轨道2上,并在车体内的第一驱动电机18驱动滚轮转动时使车体1沿轨道2运动;
[0032]
轨道2和滚轮相对任一侧设有印刷有标识码的标识条4,车体1内设有读码器7用于读取标识条中所包含的距离信息,并将距离信息发送至控制平台;
[0033]
车体1的下方设有双光球机3用于获取行进路上的图像信息,并实时发送至控制平台。
[0034]
具体的,滚轮由主动轮21和从动轮5组成,前后设置的两对滚轮将车体1悬挂在轨道2上,在主动轮21由第一驱动电机18(可以为伺服电机)由安装在控制盒10中的主控器通过伺服驱动器9驱动使车体1可在轨道2上自由的前后移动,其中第一驱动电机18在安装在主控器的控制下行走速度:0~120m/min可调。可分为自行巡检速度,紧急事件高速行走;刹车距离:1m/s移动速度下,水平轨道上紧急刹车距离0.5m以内;最小转弯半径:不大于1.5m,并具备弯道自动减速通过功能;爬坡能力:在不小于60度的坡度上能够平顺运动,坡道采用在轨道上镶嵌爬升机构,增加摩擦力机器人行走速度:0-2m/s连续可调;设在车体上的滑触线触头6可以从沿轨道2铺设的电源线进行取电供车体使用;读码器7可在车体行进过程中实时扫描设置在轨道2上的标识条4,该标识条4上印有包含从起点到终点的车体当前所在的距离信息的二维码,通过读码器7读取该二维码即可获取车体当前的位置信息,从而提高了在发生事故时机器人位置确定的效率,更有利于故障的排查;在日常的巡检工程中,设置于车体下方的双光球机3内设有高清可见光摄像机和高清红外热像仪可分别进行常规图像采集和热成像图像的采集,并通过主控器发送至控制平台,及时了解现场的情况。
[0035]
在主控器中集成有通讯单元通过设置于车体的天线座17上的天线19和控制平台(图中未示出)通讯,一般采用wifi无线网络巡检机器人所有的控制信号、视频数据、音频数据、现场传感器采集数据及报警信息等均通过无线网络传输至控制平台。
[0036]
需要说明的是,上述实施例所采用的主控器、双光球机等设备均可采用现有的电学设备,本实用新型在此不做限制。
[0037]
为进一步优化上述方案,在本实用新型的另一实施例中还包括限位轮20设置于和滚轮中心轴相垂直的位置用于将车体限定在轨道上。限位轮20的加入保证了车体在转弯等情况下运行的稳定性。
[0038]
在本实用新型的一些具体实施例中为保证车体行进时的安全性,还包括:激光测距传感器15,激光测距传感器15设置于车体上用于探测车体前方的障碍物。以及指示灯14,指示灯14设置于车体上用于指示车体的运转状态。
[0039]
具体的,在车体的前方设有两个传感器安装座16,分别安装有激光测距传感器15,在运行中对障碍物和隧道内工作人员进行探测,遇到障碍停止滑行,并报警。为增加结构上的防护,防止碰撞造成人员或者设备损伤智能巡检机器人在明显位置安装有闪动警示灯,提醒隧道内工作人员注意,指示灯14可具有红绿黄三种颜色,绿灯闪烁可代表正常的运行,红灯闪烁可代表前方有障碍物或巡检机器人正在靠近,黄灯可表示机器人出现了故障灯情
况的预警,使用人员可根据具体情况而定。并且为进一步增强可操作性,避免在控制平台的远程操控失效的情况下,在车体上设有急停开关13,该急停开关13和主控器连接,在按下后可使巡检机器人停止运动,避免事故的发生,为车体的安全运行提供了保障。
[0040]
为增强巡检机器人的功能的完整性,在本实用新型的一些具体实施例中还包括:温湿度传感器,温湿度传感器设置于车体中用于探测温湿度信息,并发送至控制平台。
[0041]
以及有害气体传感器,有害气体传感器设置于车体上用于探测有害并将探测结果发送至控制平台。可对氧气、一氧化碳、pm2.5、pm50等气体的浓度进行监测,结合温湿度传感器可对火灾等情况的发生进行监控,以及在煤矿等有可能存在有害气体泄漏的场所,可及时预警有害气体的存在。
[0042]
为增强双光球机3扫描的视野范围,在车体的底部设有升降部12,双光球机3通过升降部12和车体连接,并在车体的控制下实现双光球机3的升降控制。
[0043]
升降部包括:第二驱动电机8(伺服电机)和升降架,第二驱动电机8设置于车体内,升降架设置于车体的底部用于固定双光球机,第二驱动电机8用于驱动升降架的升降。
[0044]
具体的,在车体的中间部位留有和伺服电机传动连接的丝杠(图中未示出)的通道11,丝杠的一端和伺服电机传动连接,丝杠的另一端固定双光球机3,可实现双光球机3的升降,增大扫描的范围,在丝杠的外部设置可伸缩的橡胶罩体来保护内部的电源线等结构。当然本领域技术人员还可采用其他的可升降结构实现双光球机3的升降控制,本实用新型在此不做限制。
[0045]
参照图4和图5所示的车体的整体的视图,车体高度为390mm,加上双光球机的整体高度为750mm,最宽处不超过500mm,结构更加的紧凑节约空间。
[0046]
可以理解的是,上述各实施例中相同或相似部分可以相互参考,在一些实施例中未详细说明的内容可以参见其他实施例中相同或相似的内容。
[0047]
需要说明的是,在本实用新型的描述中,术语“第一”、“第二”等仅用于描述目的,而不能理解为指示或暗示相对重要性。此外,在本实用新型的描述中,除非另有说明,“多个”的含义是指至少两个。
[0048]
在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不一定指的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任何的一个或多个实施例或示例中以合适的方式结合。
[0049]
尽管上面已经示出和描述了本实用新型的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本实用新型的限制,本领域的普通技术人员在本实用新型的范围内可以对上述实施例进行变化、修改、替换和变型。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips