
 商标分类
商标分类  商标转让
商标转让 
行走机器人装置及巡检系统的制作方法
 2021-02-04 07:02:06|
2021-02-04 07:02:06| 296|
296| 起点商标网
起点商标网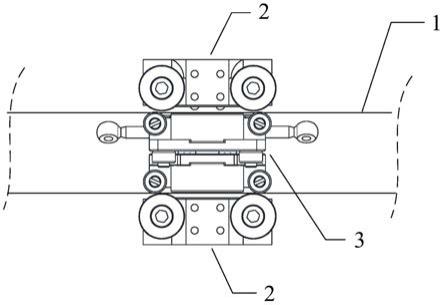
[0001]
本发明涉及检测设备技术领域,尤其涉及一种行走机器人装置及巡检系统。
背景技术:
[0002]
行走机器人可用于矿井、铁轨等巡检工作。现有技术的轨道一般为工字型轨道。行走机器人一般通过机械结构卡接在工字型轨道上行走。这种行走机器人和工字型轨道卡接的方式,使得行走机器人在转弯的时候,由于受力不均匀,容易脱轨。
技术实现要素:
[0003]
本发明实施例提供一种行走机器人装置及巡检系统,以解决现有技术的行走机器人在工字型轨道上行走时,在转弯的时候,容易出现脱轨等问题。
[0004]
本发明实施例提供一种行走机器人装置,包括:行走机器人和管状轨道;所述行走机器人包括:至少一组外磁车、至少一个内磁车和动力件;每组所述外磁车的数量为两个,两个所述外磁车分别相对位于所述管状轨道的上侧壁的外表面上和下侧壁的外表面上,所述内磁车位于所述管状轨道内,且每一所述内磁车正对每组所述外磁车,所述内磁车分别和正对的两个所述外磁车磁性吸附,所述动力件与所述内磁车连接,用于驱动所述内磁车移动。
[0005]
进一步,所述外磁车包括:第一安装板、第一磁性件和两组第一车轮,所述第一安装板的朝向所述管状轨道的表面上设置有第一安装槽,所述第一磁性件设置在所述第一安装槽内,两组所述第一车轮分别与所述第一安装板的两端轴连接,所述第一车轮的轮面与所述第一安装板朝向的所述管状轨道的外表面抵接。
[0006]
进一步,所述行走机器人装置还包括:刹车组件,所述刹车组件包括:舵机固定板、舵机、刹车块、舵盘和刹车弹簧;所述舵机固定板由底板和两个竖板组成,所述底板设置在位于所述管状轨道上方的一个所述外磁车的所述第一安装板的上表面上,所述底板上对称设置两个所述竖板和两个条状开口,且两个所述条状开口位于两个所述竖板之间,每一所述条状开口紧邻每一所述竖板,所述竖板上设置有第一开口;所述舵机的数量为两个,分别对称安装在两个所述竖板的相隔的一侧;所述刹车块的数量为两个,分别位于所述第一安装板的两端的一组所述第一车轮的上方,所述刹车块上设置有与同端的所述第一开口对着的第二开口,每一所述刹车块的下部穿过每一所述条状开口;所述舵盘的数量为两个,所述舵盘具有偏心连接孔,每一所述舵盘分别通过各自的所述偏心连接孔套设在每一所述舵机的输出端上,每一所述舵机的输出端分别穿过同端的所述第一开口且伸入到同端的所述第二开口,使每一所述舵盘位于每一所述第二开口内,每一所述舵盘可转动与所位于的所述第二开口的上边缘抵接;所述刹车块的两侧各设置一所述刹车弹簧,所述刹车弹簧的一端连接所述刹车块的上部,所述刹车弹簧的另一端连接同端的所述竖板的下部;当所述舵盘与所位于的所述第二开口的上边缘抵接时,所述刹车弹簧处于伸长的状态,所述刹车块的下部与对应的一组所述第一车轮分离;当所述舵盘与所位于的所述第二开口的上边缘分离
时,在所述刹车弹簧的弹力作用下,所述刹车块的下部压接在对应的一组所述第一车轮的轮面上。
[0007]
进一步,所述内磁车包括:第二安装板、第三安装板、两个第二磁性件和四组第二车轮,所述第二安装板的下表面连接所述第三安装板的上表面,所述第二安装板的上表面上设置一所述第二磁性件,所述第三安装板的下表面上设置另一所述第二磁性件;所述第二安装板的上表面的两端各轴连接一组所述第二车轮,所述第三安装板的下表面的两端各轴连接一组所述第二车轮,所述第二安装板的上表面上的所述第二车轮的轮面与所述管状轨道的上侧壁的内表面抵接,所述第三安装板的下表面上的所述第二车轮的轮面与所述管状轨道的下侧壁的内表面抵接。
[0008]
进一步,所述内磁车还包括:导向轮,所述第三安装板的四角处为内凹的弧形,所述第二安装板的下表面的正对四个所述弧形的位置各轴连接一个所述导向轮,所述导向轮的转轴垂直于所述第二安装板,所述导向轮的轮面与同侧的所述管状轨道的侧壁的内表面抵接。
[0009]
进一步,所述动力件包括:两个第一电机和两根第一牵引绳,两个所述第一电机分别位于所述管状轨道的两端,每一所述第一电机的输出轴分别连接每根所述第一牵引绳的一端,每根所述第一牵引绳的另一端分别连接位于所述行走机器人装置的两端的所述内磁车,所述第一牵引绳位于所述管状轨道内;或者,所述动力件包括:两个第二电机、两根第二牵引绳、减速机和两个滚筒,两个所述第二电机分别位于所述管状轨道的两端,每根所述第二牵引绳的一端固定在每一所述滚筒上,且每根所述第二牵引绳绕所述滚筒缠绕,每根所述第二牵引绳的另一端分别连接位于所述行走机器人装置的两端的所述内磁车,所述第二牵引绳位于所述管状轨道内,所述减速机为双输出轴电机,每一所述滚筒套设在每一所述减速机的一输出轴上,每一所述减速机的另一输出轴安装有电磁抱闸,所述第二电机的输出轴与所述减速机连接。
[0010]
本发明实施例还提供一种巡检系统,包括:上述的行走机器人装置和检测组件;所述检测组件搭载在所述行走机器人上。
[0011]
进一步,所述检测组件包括:第一外壳、第二外壳、内支撑板和至少一个检测负载;所述第一外壳具有凹槽,所述凹槽的尺寸与所述管状轨道的尺寸匹配,所述管状轨道穿过所述凹槽,所述管状轨道上方的所述外磁车位于所述凹槽上方的所述第一外壳内,所述管状轨道下方的所述外磁车位于所述凹槽下方的所述第一外壳内;所述第二外壳位于所述管状轨道的下方,所述检测负载安装在所述第二外壳内和/或安装在所述第二外壳的外表面上;所述内支撑板安装在位于所述管状轨道下方的一个所述外磁车上,所述内支撑板与所述第一外壳的下部连接,所述内支撑板与所述第二外壳的上部连接。
[0012]
进一步:所述凹槽的槽口面的两端的上侧和下侧各对称设置一挡片,所述槽口面为沿所述管状轨道的延伸方向延伸的表面,所述挡片的一表面与所述管状轨道的一侧壁相对且抵接。
[0013]
进一步,所述巡检系统还包括:微动开关和弹片,所述第一外壳的两端的侧壁的内表面各设置一微动开关,且所述微动开关位于所述凹槽的上边缘,每一所述微动开关连接一所述弹片;当至少一个所述弹片与最靠近所述弹片的所述内磁车磁性吸附时,所述微动开关断开;当两个所述弹片分别与最靠近各自的所述内磁车未吸附时,所述微动开关接通。
[0014]
本发明实施例,内磁车通过磁力带动与其磁性吸附的外磁车一起移动,实现行走机器人的行走。由于内磁车和牵引绳位于封闭的管状轨道内,在转弯时内磁车不会脱离管状轨道,且内磁车磁性吸附外磁车,转弯时外磁车也不易脱离管状轨道,从而使行走机器人可平稳地移动,便于进行检测,也可提高安全性;检测组件随着行走机器人的行走对经过的区域进行相应的检测,以便及时发现异常。
附图说明
[0015]
为了更清楚地说明本发明实施例的技术方案,下面将对本发明实施例的描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
[0016]
图1是本发明一优选实施例的行走机器人装置的立体图;
[0017]
图2是本发明一优选实施例的行走机器人装置的剖视图;
[0018]
图3是本发明另一优选实施例的行走机器人装置的立体图;
[0019]
图4是本发明另一优选实施例的行走机器人装置的剖视图;
[0020]
图5是本发明一优选实施例的外磁车的立体图;
[0021]
图6是本发明一优选实施例的外磁车的侧视图;
[0022]
图7是本发明另一优选实施例的外磁车和刹车组件的侧视图;
[0023]
图8是本发明一优选实施例的内磁车的立体图;
[0024]
图9是本发明另一优选实施例的内磁车的侧视图;
[0025]
图10是本发明实施例的内磁车的第三安装板的结构示意图;
[0026]
图11是本发明实施例的另一优选实施例的动力件的示意图;
[0027]
图12是本发明另一优选实施例的刹车组件的舵机固定板的立体图;
[0028]
图13是本发明另一优选实施例的刹车组件的舵机固定板的俯视图;
[0029]
图14是本发明另一优选实施例的刹车组件的刹车块的立体图;
[0030]
图15是本发明另一优选实施例的刹车组件的刹车状态的结构示意图;
[0031]
图16是本发明另一优选实施例的刹车组件的未刹车状态的结构示意图;
[0032]
图17是本发明实施例的巡检系统的立体图;
[0033]
图18是本发明实施例的检测组件的立体图;
[0034]
图19是本发明实施例的检测组件的左视图;
[0035]
图20是本发明实施例的第一外壳的立体图;
[0036]
图21是本发明实施例的内支撑板的立体图;
[0037]
图22是本发明实施例的巡检系统的部分结构的剖视图。
具体实施方式
[0038]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获取的所有其他实施例,都属于本发明保护的范围。
[0039]
本发明实施例公开一种行走机器人装置。如图1~16所示,该行走机器人装置包括:行走机器人和管状轨道1。优选的,管状轨道1的形状为方管。
[0040]
行走机器人用于搭载检测组件。具体的,行走机器人包括:至少一组外磁车2、至少一个内磁车3和动力件。图1和图2示出了只有一组外磁车2和一个内磁车3的实施例,图3和图4示出了有多组外磁车2和多个内磁车3的实施例。外磁车2的组数和内磁车3的数量可根据实际情况确定。相邻两个内磁车3互相连接,位于管状轨道1的同一外表面上的相邻两个外磁车2互相连接。
[0041]
其中,每组外磁车2的数量为两个。外磁车2可用于搭载检测组件。两个外磁车2分别相对位于管状轨道1的上侧壁的外表面上和下侧壁的外表面上。内磁车3位于管状轨道1内,且每一内磁车3正对每组外磁车2。内磁车3分别和正对的两个外磁车2磁性吸附。动力件与内磁车3连接,用于驱动内磁车3移动。
[0042]
通过上述的结构设计,动力件驱动内磁车3移动,内磁车3通过磁力带动与其磁性吸附的外磁车2一起移动,从而可实现行走机器人的行走。由于内磁车3位于封闭的管状轨道1内,在转弯时内磁车3不会脱离管状轨道1,且内磁车3磁性吸附外磁车2,转弯时外磁车2也不易脱离管状轨道1,从而行走机器人可平稳地移动,便于进行检测,也可提高安全性。
[0043]
具体的,外磁车2包括:第一安装板201、第一磁性件202和两组第一车轮203。第一安装板201的朝向管状轨道1的表面上设置有第一安装槽。具体的,位于管状轨道1的上侧壁的外表面上的外磁车2的第一安装板201的下表面设置有第一安装槽,位于管状轨道1的下侧壁的外表面上的外磁车2的第一安装板201的上表面设置有第一安装槽。第一磁性件202设置在第一安装槽内。两组第一车轮203分别与第一安装板201的两端轴连接。第一安装板201的两端指的是沿管状轨道1的延伸方向(即行走方向)的两端。应当理解的是,第一车轮203的转轴是垂直于管状轨道1的两个侧壁的,才能使第一车轮203在管状轨道1上沿着管状轨道1的延伸方向滚动。第一车轮203的轮面与第一安装板201朝向的管状轨道1的外表面抵接。具体的,位于管状轨道1的上侧壁的外表面上的外磁车2的第一车轮203的轮面与管状轨道1的上侧壁的外表面抵接,位于管状轨道1的下侧壁的外表面上的外磁车2的第一车轮203的轮面与管状轨道1的下侧壁的外表面抵接,第一车轮203在管状轨道1上滚动,减小阻力,从而有利于外磁车2移动。
[0044]
优选的,每组的两个外磁车2的第一安装板201的一侧壁通过一连接板204连接,更有利于每组中的两个外磁车2同步移动。
[0045]
若有至少两组外磁车2,则位于管状轨道1的同一外表面上的相邻两个外磁车2互相连接。相邻两个外磁车2的相邻的一端各设置一第一连接片205。相邻两个外磁车2的相邻两个第一连接片205通过螺栓固定,从而将至少两组外磁车2连接在一起。该第一连接片205可以设置在第一安装板201的端部。
[0046]
具体的,内磁车3包括:第二安装板301、第三安装板302、两个第二磁性件303和四组第二车轮304。第二安装板301的下表面连接第三安装板302的上表面。第二安装板301的上表面上设置一第二磁性件303。第三安装板302的下表面上设置另一第二磁性件303。第二安装板301的上表面的两端各轴连接一组第二车轮304。第三安装板302的下表面的两端各轴连接一组第二车轮304。第二安装板301和第三安装板302的两端指的是沿管状轨道1的延伸方向(即行走方向)的两端。具体的,第二安装板301的两端的上表面和第三安装板302的
两端的下表面可设置连接座,每组第二车轮304与连接座轴连接。应当理解的是,第二车轮304的转轴是垂直于管状轨道1的两个侧壁的,才能使第二车轮304在管状轨道1上沿着管状轨道1的延伸方向滚动。第二安装板301的上表面上的第二车轮304的轮面与管状轨道1的上侧壁的内表面抵接,第三安装板302的下表面上的第二车轮304的轮面与管状轨道1的下侧壁的内表面抵接。第二车轮304在管状轨道1上滚动,减小阻力,从而有利于内磁车3移动。
[0047]
优选的,内磁车3还包括:导向轮305。第三安装板302的四角处为内凹的弧形。第二安装板301的下表面的正对四个弧形的位置各轴连接一个导向轮305。导向轮305的转轴垂直于第二安装板301。导向轮305的轮面与同侧的管状轨道1的侧壁的内表面抵接,从而可使导向轮305对内磁车3的移动进行导向,也有利于进一步减小阻力,辅助内磁车3移动。
[0048]
优选的,若内磁车3的数量为至少两个,相邻两个内磁车3互相连接。具体的,相邻两个内磁车3的相邻的一端各设置一第二连接片306。相邻两个内磁车3的相邻两个第二连接片306通过螺栓固定。该第二连接片306可以设置在第二安装板301和/或第三安装板302的端部。
[0049]
具体的,在一优选的实施例中,动力件包括:两个第一电机和两根第一牵引绳。两个第一电机分别位于管状轨道1的两端。每一第一电机的输出轴分别连接每根第一牵引绳的一端。每根第一牵引绳的另一端分别连接位于行走机器人装置的两端的内磁车。第一牵引绳位于管状轨道1内。第一牵引绳可以为钢丝绳。
[0050]
具体的,若内磁车3的数量为一个,则内磁车3的两端与两根第一牵引绳的另一端连接。具体的,可在内磁车3的两端各设置一连接杆307。两根第一牵引绳分别与两个连接杆307连接。该连接杆307可以位于第二安装板301和/或第三安装板302的两端。例如,两个连接杆307分别位于第二安装板301的两端,或者,两个连接杆307分别位于第三安装板302的两端,或者,一个连接杆307位于第二安装板301的一端,另一连接杆307位于第三安装板302与第二安装板301的一端相对的另一端。
[0051]
具体的,若内磁车3的数量为至少两个,相应的,外磁车2的组数与内磁车3的数量相同,则位于两端的两个内磁车3分别与两根第一牵引绳的另一端连接。具体的,可在两端的两个内磁车3的相隔的两端各设置一连接杆307,两根第一牵引绳的另一端分别与两个连接杆307连接。同样的,该连接杆307可以设置在第二安装板301和/或第三安装板302的端部,在此不再赘述。
[0052]
具体的,在另一优选的实施例中,动力件包括:两个第二电机7、两根第二牵引绳8、减速机9和两个滚筒10。两个第二电机7分别位于管状轨道1的两端。第二牵引绳8位于管状轨道1内。每根第二牵引绳8的一端固定在每一滚筒10上,且每根第二牵引绳8绕滚筒10缠绕。与前述的第一牵引绳一样,每根第二牵引绳8的另一端分别连接位于行走机器人装置的两端的内磁车,在此不再赘述。第二牵引绳8可以为钢丝绳。减速机9为双输出轴电机。每一滚筒10套设在每一减速机9的一输出轴上。减速机9的一输出轴上可设置编码器11,以精确地采集转速。每一减速机9的另一输出轴安装有电磁抱闸12。第二电机7的输出轴与减速机9连接,使第二电机7可驱动减速机9运行。应当理解的是,两个减速机9、两个滚筒10和两个电磁抱闸12也是位于管状轨道1的两端。此外,还可以设置变频器,变频器分别与第二电机7、编码器11、电磁抱闸12电连接,用于控制第二电机7的转速以及电磁抱闸12的开启和关闭。
[0053]
通过上述的结构设计,第二牵引绳8自然状态下处于张紧状态,两端的第二电机7
通过变频器联动,同时启动正反转(一端紧绳另一端松绳),第二电机7通过减速机9调速后提供同比例转速到滚筒10,两个滚筒10转动,带动第二牵引绳8移动,第二牵引绳8带动行走机器人装置不断往返运行,实现行走机器人装置在管状轨道1上的自由行走。当第二电机7失电、断电或有其他故障时,滚筒10不能及时停止,或者需要行走机器人装置停止在某一位置,第二电机7由于惯性不能满足要求时,变频器可及时触发抱闸联动信号,启动电磁抱闸12,使得滚筒10停止传动,防止行走机器人装置出现溜坡或者定位误差。
[0054]
此外,行走机器人装置的外磁车2也具有刹车功能,防止外力过大造成内外两磁车分离,失去控制而自由滑动。因此,优选的,该行走机器人装置还包括:刹车组件4。刹车组件4安装在位于管状轨道1的上侧壁的外表面上的一个外磁车2上,即当有多组外磁车2时,刹车组件4也只安装在一个外磁车2上。刹车组件4用于限制外磁车2移动,应当理解的是,当有至少两组外磁车2时,相邻两个外磁车2连接在一起,且每组中的两个外磁车2也连接在一起,则刹车组件4虽然只安装在一个外磁车2上,仍然可使所有外磁车2刹车。
[0055]
具体的,刹车组件4包括:舵机固定板、舵机401、刹车块402、舵盘403和刹车弹簧404。
[0056]
其中,舵机固定板由底板405和两个竖板406组成。底板405设置在位于管状轨道1上方的一个外磁车2的第一安装板201的上表面上。底板405上对称设置两个竖板406和两个条状开口407。两个条状开口407位于两个竖板406之间。每一条状开口407紧邻每一竖板406。竖板406上设置有第一开口408。
[0057]
舵机401的数量为两个,分别对称安装在两个竖板406的相隔的一侧。
[0058]
刹车块402的数量为两个,分别位于第一安装板201的两端的一组第一车轮203的上方。刹车块402上设置有与同端的第一开口408对着的第二开口409。每一刹车块402的下部穿过每一条状开口407。
[0059]
舵盘403的数量为两个。舵盘403具有偏心连接孔。优选的,舵盘403为椭圆形。每一舵盘403分别通过各自的偏心连接孔套设在每一舵机401的输出端上。每一舵机401的输出端分别穿过同端的第一开口408且伸入到同端的第二开口409,使每一舵盘403位于每一第二开口409内。每一舵盘403可转动与所位于的第二开口409的上边缘抵接。
[0060]
刹车块402的两侧各设置一刹车弹簧404。刹车弹簧404的一端连接刹车块402的上部,刹车弹簧404的另一端连接同端的竖板406的下部。
[0061]
启动舵机401,可带动套设的舵盘403转动,在舵盘403转动的过程中,当舵盘403与所位于的第二开口409的上边缘抵接时,刹车弹簧404处于伸长的状态,刹车块402的下部与对应的一组第一车轮203分离,从而不会限制外磁车2的移动;当舵盘403与所位于的第二开口409的上边缘分离时,在刹车弹簧404的弹力作用下,刹车块402的下部压接在对应的一组第一车轮203的轮面上,使得外磁车2无法移动。
[0062]
优选的,刹车块402的下部延伸有两个刹车片410。两个刹车片410分别位于对着的一组第一车轮203的上方,且两个刹车片410的朝向第一车轮203的表面为与第一车轮203匹配的弧形表面,从而更有利于限制第一车轮203的转动。
[0063]
优选的,该行走机器人装置还包括:控制器。控制器可以是一种远程控制器。控制器可与动力件的电机、舵机401等电连接,从而可控制电机和舵机401,以便在预设的检测点使内磁车3和外磁车2停止移动。在管状轨道1上可以设置接近开关,以检测行走机器人装置
的位置,将位置信息传递给控制器,以便控制器进行控制。
[0064]
综上,本发明实施例的行走机器人装置,内磁车通过磁力带动与其磁性吸附的外磁车一起移动,实现行走机器人的行走。由于内磁车和牵引绳位于封闭的管状轨道内,在转弯时内磁车不会脱离管状轨道,且内磁车磁性吸附外磁车,转弯时外磁车也不易脱离管状轨道,从而使行走机器人可平稳地移动,便于进行检测,也可提高安全性。
[0065]
本发明实施例还公开了一种巡检系统。如图1~22所示,该巡检系统包括:上述实施例的行走机器人装置和检测组件5。检测组件5搭载在行走机器人上,检测组件5可用于检测行走经过的区域的情况。
[0066]
本发明一优选的实施例中,检测组件5包括:第一外壳501、第二外壳502、内支撑板503和至少一个检测负载。
[0067]
其中,第一外壳501具有凹槽504。凹槽504的尺寸与管状轨道1的尺寸匹配。管状轨道1穿过凹槽504,管状轨道1上方的外磁车2位于凹槽504上方的第一外壳501内,管状轨道2下方的外磁车2位于凹槽504下方的第一外壳501内。优选的,为了防止第一外壳501倾倒,凹槽504的槽口面的两端的上侧和下侧各对称设置一挡片505。所述的槽口面为沿管状轨道1的延伸方向延伸的表面。槽口面的两端指的是沿管状轨道1的延伸方向(即行走方向)的两端。挡片505的一表面与管状轨道1的一侧壁相对且抵接。挡片505与槽口面相对的凹槽504的底部一起使第一外壳501与管状轨道1卡接,有利于防止第一外壳501倾倒。
[0068]
第二外壳502位于管状轨道1的下方。检测负载安装在第二外壳502内和/或安装在第二外壳502的外表面上。
[0069]
内支撑板503安装在位于管状轨道1下方的一个外磁车2上。具体的,内支撑板503的表面与位于管状轨道1下方的一个外磁车2的第一安装板201的下表面固定连接。优选的,安装有内支撑板503的外磁车2与安装有刹车组件4的外磁车2为同组外磁车2。内支撑板503与第一外壳501的下部连接,内支撑板503与第二外壳502的上部连接。
[0070]
优选的,如图22所示(为便于展示,图22只示出了第一外壳501和内磁车3,省略了其他一些结构),检测组件5还包括:微动开关506和弹片507。第一外壳501的两端的侧壁的内表面各设置一微动开关506,且微动开关506位于凹槽504的上边缘。第一外壳501的两端指的是沿管状轨道1的延伸方向(即行走方向)的两端。每一微动开关506连接一弹片507。弹片507可与最靠近弹片507的内磁车3的第二磁性件303磁性吸附。即,当内磁车3只有一个时,第一外壳501的两端的弹片507与该内磁车3的第二磁性件303吸附;当内磁车3有至少两个时,第一外壳501的两端的弹片507分别与位于两端的内磁车3的第二磁性件303磁性吸引。具体的,该第二磁性件303为位于第二安装板301上的第二磁性件303。
[0071]
当至少一个弹片507与最靠近该弹片507的内磁车3磁性吸附时,表明外磁车2和对应的内磁车3依然磁性吸附在一起,微动开关506断开;当两个弹片507分别与最靠近各自的内磁车3未吸附时,表明由于阻力增大、或异物阻挡等等原因,导致外磁车2无法移动而与对应的内磁车3分离,微动开关506接通。优选的,微动开关506可与控制器电连接,微动开关506接通后,可向控制器发送相应的信号,使控制器关闭电机,使行走机器人停止行走,以便及时进行相应的检修。
[0072]
具体的,检测负载可以包括但不限于:摄像机、超声波传感器、拾音器、气体含量检测件等等。
[0073]
第二外壳502的一端的侧壁上可以设置摄像机开口,摄像机安装在第二外壳502内,摄像机的镜头对着该摄像机开口,以便采集图像。第二外壳502的一端和另一端指的是沿管状轨道1的延伸方向(即行走方向)的两端。
[0074]
第二外壳502的两端的侧壁上可以对称设置一超声波传感器开口,两个超声波传感器安装在第二外壳502内,每一超声波传感器的发射接收头位于超声波传感器开口中,以便发射和接收超声波来确定相应的故障。
[0075]
第二外壳502的另一端的侧壁上可以设置拾音器开口,拾音器安装在第二外壳502内,拾音器对着该拾音器开口,以便采集声音,可从声音确定相应故障;此外,拾音器还可以采集行走机器人附近的工作人员的语音,将语音传递到控制器。
[0076]
气体含量检测件可安装在第二外壳502的位于管状轨道1两侧的其中一侧壁的外表面上。气体含量检测件是可以检测甲烷、一氧化碳、二氧化碳和氧气含量的一体式装置。
[0077]
优选的,检测组件5还可以包括:喇叭。第二外壳502的下侧壁上设置有喇叭口,喇叭可对着喇叭口。喇叭播放控制器发送的信息、指令等等,以便管状轨道1区域的工作人员收到这些信息和指令。
[0078]
优选的,检测组件5还可以包括:天线。天线安装在第二外壳502的一端的侧壁上。天线可以是4g天线,以便通过天线使行走机器人可与外部设备进行通信连接。
[0079]
优选的,检测组件5还可以包括:指示灯。指示灯可设置在与气体含量检测件相对的第二外壳502的另一侧壁的外表面上。指示灯可根据需求进行相应的指示设置。
[0080]
优选的,检测组件5还可以包括:急停开关。急停开关可设置在与气体含量检测件相对的第二外壳502的另一侧壁的外表面上。在遇到紧急情况需要行走机器人停止行走时,可通过人工按压急停开关,使行走机器人紧急制动。
[0081]
应当理解的是上述的检测负载及其他一些组件的位置并不以此为限,还可以根据需要安装在第二外壳502的其他位置。
[0082]
此外,检测组件5中的上述各个组件,可直接与控制器电连接,也可以检测组件5设置一主控板,各个组件与主控板电连接,主控板与控制器电连接,由主控板中转。主控板可安装在第二外壳502内。
[0083]
检测组件5中有些组件需要供电。这些组件可外接电缆由外部电源供电,也可以由电池供电。优选的,检测组件5还包括:电池腔508和电池。电池位于电池腔508内。电池腔508位于内支撑板503的上表面上。电池腔508紧靠第一外壳501。电池腔508的两端的侧壁的外表面各设置一搭扣509。电池腔508的两端指的是沿管状轨道1的延伸方向(即行走方向)的两端。第二外壳502的两端的侧壁的外表面各设置一对应搭扣509的搭扣挂片510。第二外壳502的两端指的是沿管状轨道1的延伸方向(即行走方向)的两端。每一搭扣挂片510挂扣在每一搭扣509上,从而将电池腔508稳固安装。电池与需要供电的检测组件5的各个组件电连接,为这些组件供电。
[0084]
优选的,该巡检系统还包括:两个导轨清洁刷6。两个导轨清洁刷6分别设置在第一外壳501的两端的侧壁的外表面上,且两个导轨清洁刷6的刷头安装板位于凹槽504的上方,两个导轨清洁刷6的刷头与管状轨道1的上侧壁的外表面接触,从而在行走机器人行走的过程中,导轨清洁刷6可同时对管状轨道1的上侧壁的外表面进行清洁,以便清除影响外磁车2行走的异物,也有利于保持管状轨道1的清洁。应当理解的是,管状轨道1由于是封闭的,所
以管状轨道1的内部一般不会有异物进入;管状轨道1的下侧壁的外表面由于异物重力作用,一般也不会堆积异物。
[0085]
综上,本发明实施例的巡检系统,内磁车通过磁力带动与其磁性吸附的外磁车一起移动,实现行走机器人的行走。由于内磁车和牵引绳位于封闭的管状轨道内,在转弯时内磁车不会脱离管状轨道,且内磁车磁性吸附外磁车,转弯时外磁车也不易脱离管状轨道,从而使行走机器人可平稳地移动,便于进行检测,也可提高安全性;检测组件随着行走机器人的行走对经过的区域进行相应的检测,以便及时发现异常,检测负载种类多,可以从不同方面进行检测,避免遗漏。
[0086]
以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本发明的保护范围之内。因此,本发明的保护范围应以权利要求的保护范围为准。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips