
 商标分类
商标分类  商标转让
商标转让 
轨道用测距仪的制作方法
 2021-02-04 05:02:51|
2021-02-04 05:02:51| 395|
395| 起点商标网
起点商标网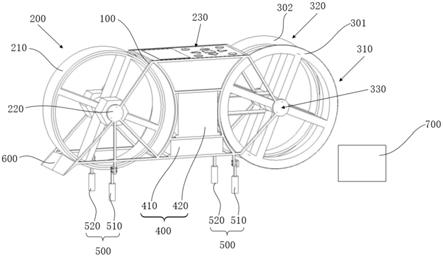
[0001]
本实用新型涉及测距仪表技术领域,特别是涉及一种轨道用测距仪。
背景技术:
[0002]
随着经济的发展,轨道交通的数量逐渐增多,而由于信号系统数据的准确性直接影响列车运行,因此,当轨道铺设完成后常需要对安装完成的信号设备对应的信号系统数据进行复测和校核。其中,信号系统数据中信号设备之间的轨道长度常通过轨道测距仪来测量。目前,轨道测距仪为手持式测距仪,手持式测距仪在使用过程中需要工作人员手动操作,由于轨道床面不平整及轨道铺设面窄,工作人员行走不便且操作难度较大,常出现工作人员行走速度与手持式测距仪不匹配的情况出现,进而常出现手持式测距仪的测量轮常常从轨到上表面滑落,使得测量数据的准确性较低,常需要多次重复测量,测量效率较低。
技术实现要素:
[0003]
基于此,有必要针对上述问题,提供一种能够提高信号系统数据中信号设备之间的轨道长度测量准确性,进而提高测量效率的轨道用测距仪。
[0004]
一种轨道用测距仪,包括:
[0005]
机架;
[0006]
测距组件,所述测距组件设于所述机架上,用于测量轨道上两点之间沿所述轨道延伸方向的距离;
[0007]
轨道轮,所述轨道轮上设有相对的第一轮缘与第二轮缘,所述第一轮缘与所述第二轮缘之间形成卡槽;所述轨道轮通过所述卡槽卡接于所述轨道;所述轨道轮滚动设置于所述轨道的上表面,并通过所述机架带动所述测距组件沿所述轨道的延伸方向移动;
[0008]
驱动组件,所述驱动组件用于驱动所述轨道轮沿所述轨道的延伸方向移动。
[0009]
优选地,在其中一个实施例中,所述卡槽尺寸可调整。
[0010]
优选地,在其中一个实施例中,所述轨道轮包括第一轨道轮、第二轨道轮与连接部件;所述第一轮缘设于所述第一轨道轮上,所述第二轮缘设于所述第二轨道轮上;所述第一轨道轮与所述第二轨道轮套设于所述连接部件上,且所述第一轨道轮及所述第二轨道轮在所述连接部件上的连接位置可调整。
[0011]
优选地,在其中一个实施例中,所述测距组件包括:
[0012]
测距轮,所述测距轮滚动设置于所述轨道的上表面;
[0013]
计数器,所述计数器用于统计所述测距轮在所述轨道上的两点之间沿所述轨道的延伸方向转动的圈数;
[0014]
计算组件,所述计算组件用于根据所述测距轮的周长与所述圈数计算所述轨道上的两点之间沿所述轨道的延伸方向的距离。
[0015]
优选地,在其中一个实施例中,所述测距轮沿所述轨道的中心线滚动。
[0016]
优选地,在其中一个实施例中,所述轨道用测距仪还包括:
[0017]
限位组件,所述限位组件设于所述轨道的两侧,用于限制所述轨道轮与所述轨道的相对位置。
[0018]
优选地,在其中一个实施例中,所述限位组件包括第一限位轮与第二限位轮,且所述第一限位轮与第二限位轮分别设于滚动设于所述轨道两侧。
[0019]
优选地,在其中一个实施例中,所述第一限位轮的中心线与所述第二限位轮的中心轴线垂直于所述轨道的上表面。
[0020]
优选地,在其中一个实施例中,所述轨道用测距仪还包括:
[0021]
控制组件,所述控制组件用于控制所述驱动组件工作状态与所述驱动组件对所述轨道轮的驱动速度。
[0022]
优选地,在其中一个实施例中,所述轨道用测距仪还包括:
[0023]
清障组件,所述清障组件用于清除所述测距组件前方的障碍物。
[0024]
上述轨道用测距仪,通过驱动组件驱动轨道轮运动,并通过轨道轮带动测距组件沿着轨道延伸的方向运动,降低了测距过程中的仪器设备的操作难度,同时轨道轮上的第一轮缘与第二轮缘限制了轨道轮的运动轨迹,保证了轨道用测距仪运动过程中的精度与稳定性,进而提高了信号系统数据的测量精度,避免了多次复核及校验信号系统数据,提高了仪器测量效率。
[0025]
对于本申请的各种具体结构及其作用与效果,将在下面结合附图作出进一步详细的说明。
附图说明
[0026]
图1为本申请其中一个实施例中的轨道用测距仪的主视图;
[0027]
图2为本申请其中一个实施例中的轨道用测距仪的立体图;
[0028]
图3为本申请其中一个实施例中的轨道用测距仪的立体图,图示有轨道;
[0029]
图4为本申请其中一个实施例中的轨道用测距仪的俯视图;
[0030]
图5为本申请其中一个实施例中的轨道用测距仪的右视图;
[0031]
图6为本申请其中一个实施例中的轨道用测距仪的右视图,图示有轨道;
[0032]
图7为本申请其中一个实施例中的轨道用测距仪的左视图。
[0033]
附图说明中:100-机架;200-测距组件;210-测距轮;220-计数器;230-计算组件;300-轨道轮;301-第一轮缘;302-第二轮缘;303-卡槽;310-第一轨道轮;320-第二轨道轮;330-连接部件;400-驱动组件;410-电源;420-驱动电机;500-限位组件;510-第一限位轮;520-第二限位轮;530-连接杆;540-腰型孔;600-清障组件;700-控制组件;800-轨道;900-链条。
具体实施方式
[0034]
为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本实用新型。但是本实用新型能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似改进,因此本实用新型不受下面公开的具体实施例的限制。
[0035]
在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0036]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
[0037]
在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
[0038]
在本实用新型中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
[0039]
需要说明的是,当元件被称为“固定于”或“设置于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。本文所使用的术语“垂直的”、“水平的”、“上”、“下”、“左”、“右”以及类似的表述只是为了说明的目的,并不表示是唯一的实施方式。
[0040]
根据图1至图4可知,本实用新型一实施例提供了的轨道用测距仪,包括机架100、测距组件200、轨道轮300与驱动组件400。其中,测距组件200与轨道轮300均设于机架100上,轨道轮300在驱动组件400的驱动下通过机架100带动测距组件200沿着轨道800延伸的方向延伸运动。测距组件200用于测量轨道800上两点(未图示)之间沿轨道延伸方向的距离。轨道轮300滚动设置于轨道800的上表面,具体的,轨道轮300上设有相对的第一轮缘301与第二轮缘302,且第一轮缘301与第二轮缘302之间形成卡槽303。轨道轮300通过卡槽303卡接于轨道800上,以保证轨道轮300沿着轨道800的延伸方向运动,进而保证测距组件200沿着轨道800的延伸方向运动,以完成测距组件200对轨道800上沿着轨道800延伸方向分布的两点之间的距离的测量。驱动组件400用于向轨道轮300提供沿轨道800的延伸方向移动的驱动力。可以理解的是,沿轨道延伸方向的距离是指,轨道上任意两点向轨道上任意一条与轨道中心线平行的线投影后得到的投影点之间的距离。一般来说,轨道的拐弯处曲率半径较大,因此可认为轨道上任意一条与轨道中心线平行的线与轨道中心线重合。可以理解的是,测距轮正转时,圈数值为正,反转时,圈数为负;或者测距轮正转时为负,反转时,圈数值为正;测距轮的实际圈数是指测距轮正转的圈数值与反转的圈数值累计后的圈数。
[0041]
在其中一个实施例中,测距组件200通过轨道800上沿轨道300延伸方向分布的两点,以测量轨道800上两点之间的距离。具体的,测距组件200可以轮式测距设备。
[0042]
在另一个实施例中,测距组件200运动至轨道800上沿轨道300延伸方向分布的两点的附近,即可测量轨道800上两点之间的距离。具体的,测距组件200可以为激光测距仪。
[0043]
根据图4与图5可知,在其中一个优选的实施例中,第一轮缘301的内表面304与轨道800上表面与侧面间的倒角配合。
[0044]
根据图4与图5可知,在其中一个优选的实施例中,第二轮缘302的内表面305与轨道800上表面与侧面间的倒角配合。
[0045]
为了减少第一轮缘301与第二轮缘302与轨道800侧面间的摩擦力,在其中一个实施例中,第一轮缘301的内表面与第二轮缘302的内表面不与轨道800的侧面接触。
[0046]
为了防止轨道弯转处对上述轨道用测距仪运行侧影响,在其中一个优选的实施例中,机架100包括第一支架(未标示)与第二支架(未标示)。其中第一支架连接于测距组件200,第二支架与轨道轮300转动连接,且第一支架与第二支架通过铰链连接。
[0047]
根据图1与图2可知,在其中一个实施例中,驱动组件400包括电源410与驱动电机420。其中驱动电机420通过传送部件与轨道轮的中心轴连接。
[0048]
在其中一个优选的实施例中,驱动电机420通过链条900与轨道轮的中心轴连接。
[0049]
在另一个优选的实施例中,驱动电机420通过传送带与轨道轮的中心轴连接。
[0050]
在其中一个实施例中,驱动组件400还包括控制器(未图示)。其中,控制器能够控制驱动电机420的工作状态,进而通过驱动电机420控制轨道轮300的工作状态,其中,轨道轮300的工作状态可以是轨道轮300的启动状态、运行速度或运行方向等。
[0051]
上述轨道用测距仪,通过驱动组件驱动轨道轮运动,并通过轨道轮带动测距组件沿着轨道延伸的方向运动,降低了测距过程中的仪器设备的操作难度,同时轨道轮上的第一轮缘与第二轮缘限制了轨道轮的运动轨迹,保证了轨道用测距仪运动过程中的精度与稳定性,进而提高了信号系统数据的测量精度,避免了多次复核及校验信号系统数据,提高了仪器测量效率。
[0052]
由于轨道具有不同的规格,如9kg/m、30kg/m、50kg/m、60kg/m等规格,为了提高轨道轮与不同规格的轨道的适配性,如图4所示,在其中一个实施例中,卡槽303尺寸可调整。具体的,通过调整第一轮缘301与第二轮缘302之间的间距调整卡槽303尺寸,以使卡槽303的尺寸能够适用于不同规格的轨道,进而提高轨道用测距仪的适用范围。
[0053]
具体的,在其中一个实施例中,根据图2至图6可知,轨道轮300包括第一轨道轮310、第二轨道轮320与连接部件330。其中,第一轮缘301设于第一轨道轮310上,且第二轮缘302设于第二轨道轮320上。第一轨道轮310与第二轨道轮320套设于连接部件330上,且第一轨道轮31及第二轨道轮320在连接部件330上的连接位置可调整。通过调节第一轨道轮310与第二轨道轮320在连接部件330上的连接位置,可调整第一轨道轮310与第二轨道轮320之间的间距,以调整第一轨道轮310上第一轮缘301与第二轨道320上第二轮缘302之间的间距,进而实现卡槽303尺寸的调整。
[0054]
在其中一个具体的实施例中,连接部件330的外部设有外螺纹,且第一轨道轮310及第二轨道轮320设有与外螺纹配合的内螺纹。第一轨道轮310、第二轨道轮320与连接部件330通过内外螺纹配合,实现第一轨道轮310及第二轨道轮320与连接部件330连接位置的调
整。
[0055]
在其中一个优选的实施例中,在第一轨道轮310的两侧还设有紧固部件(未图示),且紧固部件套设于连接部件330上,通过紧固部件将第一轨道轮310锁定在连接部件330上。
[0056]
在其中一个优选的实施例中,在第二轨道轮320的两侧还设有紧固部件,且紧固部件套设于连接部件330上,通过紧固部件将第二轨道轮320锁定在连接部件330上。
[0057]
在其中一个具体的实施例中,连接部件330为螺栓,紧固部件为螺母。
[0058]
上述轨道用测距仪,通过将轨道设计为卡槽尺寸可调整的结构,增大了轨道轮适用的轨道类型,提高了轨道用测距仪的适用范围。
[0059]
在其中一个实施例中,如图1与图2所示,测距组件200包括测距轮210、计数器220与计算组件230。其中,测距轮210滚动设置于轨道800的上表面,并沿轨道800的延伸方向运动。计数器220设于测距轮210的中心轴上,用于统计测距轮210在轨道800上的两点之间沿轨道的延伸方向运动时转动的圈数。计算组件230根据测距轮210的周长与计数器220统计的测距轮210的转动圈数计算得到轨道上两点之间沿轨道800的延伸方向的距离。
[0060]
为了维持轨道用测距仪的平衡,进而提高轨道用测距仪运行过程中的稳定性,在其中一个优选的实施例中,计数器220数量为了两个,且位于测距轮210的中心轴的两端。上述轨道用测距仪通过设置两个计数器,一方面提高了仪器的稳定性,另一方面提高了计数的准确性。
[0061]
在另一个实施例中,测距组件包括测速器、计时器与计算组件,其中,测速器测量轨道轮的移动速度,计时器用于统计轨道轮的移动时间,计算组件根据移动速度与移动时间积分得到轨道轮移动的距离,进而得到轨道上的两点沿轨道的延伸方向的距离。
[0062]
在轨道铺设的过程中,由于受到地形等的影响可能会出现轨道弯转与倾斜的现象,为了进一步提高测距轮的测量精度,在其中一个实施例中,测距轮210沿轨道800的中心线滚动。
[0063]
在轨道铺设的过程中,由于受到地形等的影响可能会出现轨道弯转与倾斜的现象,为了防止轨道用测距仪运动的过程中,轨道轮300与轨道800配合面较小,出现轨道轮越轨的现象出现,在其中一个实施例中,如图1至图3所示,上述轨道用测距仪还包括限位组件500。限位组件500与机架100连接,设于轨道800的两侧,用于限制轨道轮300与轨道800的相对位置,防止轨道轮300上的卡槽303越出轨道800,提高测量数据的准确率,提高轨道上两点之间间距的测量效率。
[0064]
在其中一个实施例中,如图1至图3所示,限位组件500包括第一限位轮510与第二限位轮520。第一限位轮510与第二限位轮520分别滚动设于轨道800的两侧。第一限位轮510与第二限位轮520之间形成用于卡接轨道800的限位空间(未标示)。
[0065]
在其中一个优选的实施例中,第一限位轮510与第二限位轮520对称分布于轨道800的两侧。
[0066]
在其中一个优选的实施中,第一限位轮510及第二限位轮520与轨道800的侧面之间设有一定的间距。
[0067]
在其中一个优选的实施中,第一限位轮510及第二限位轮520与轨道800的侧面之间设有一定的间距为1mm。
[0068]
为了实现上述轨道用测距仪在运行过程中能够保持平衡,在其中一个实施例中,
限位组件500为两组,并分别设于机架100的前部与后部。
[0069]
在其中一个优选的实施例中,限位空间的尺寸可调整。
[0070]
具体的,在其中一个实施例中,如图5所示,第一限位轮510转动连接于连接杆530上,连接杆530通过螺栓固定于机架100上,通过调节螺栓与机架100的连接位置能够调整第一限位轮510与第二限位轮520间的相对位置。
[0071]
进一步优选的,如图5所示,连接杆530还包括在水平面内垂直于轨道延伸方向延伸的腰型孔540。通过调整螺栓与腰型孔540的连接位置,调节连接杆530与机架100的连接位置,进而实现第一限位轮510与第二限位轮520间距的调整,也即实现对限位空间尺寸的调整,以使限位空间能够与不同规格的轨道相匹配,提高了上述轨道用测距仪的适用范围。
[0072]
上述轨道用测距仪,将限位组件设置为位于轨道两侧的第一限位轮与第二限位轮,能够有效防止轨道倾斜时轨道轮倾斜角度过大导致的轨道轮脱轨,同时,第一限位轮与第二限位轮的轮式设计将限位组件与轨道之间的滑动摩擦转为滚动摩擦,降低了限位组件与轨道侧面间的摩擦力,降低了能量消耗。
[0073]
为了进一步提高限位组件的限位效果,在其中一个实施例中,第一限位轮510的中心线与第二限位轮520的中心轴线垂直于轨道的上表面。
[0074]
上述轨道用测距仪,通过将第一限位轮与第二限位轮设于第一限位轮的中心轴线与第二限位轮的中心轴线垂直于轨道的上表面的位置,延长了第一限位轮与第二限位轮的沿垂直于轨道上表面的长度,也即延长了限位组件卡接于轨道上卡接深度,进而使得上述轨道用测距仪能够使用于倾斜角度更大的轨道上两点之间间距的测量。
[0075]
在其中一个实施例中,如图1与图2所示,上述轨道用测距仪还包括控制组件700。其中,控制组件700用于控制驱动组件工作状态与驱动组件对轨道轮的驱动速度。
[0076]
优选的,在其中一个实施例中,控制组件700采用2.4g无线技术连接驱动组件400。
[0077]
优选的,在其中一个实施例中,控制组件700还设有复位模块。
[0078]
在其中一个具体的实施例中,控制组件700为无线控制手柄(未图示)。无线控制手柄上设有开关按钮与速度控制按钮。具体的,开关按钮用于启动与关闭驱动组件400,速度控制按钮用于驱动组件400对轨道轮300的驱动速度。其中,驱动速度包括驱动速度的大小与驱动速度的方向。可以理解的是,驱动速度的方向可以是轨道延伸的方向,也可以是轨道延伸的反方向。
[0079]
在其中一个具体的实施例中,控制组件700包括速度调整模块。其中,速度调整模块设置为三级速度模式,能够实现0-6km/h范围内的调节。
[0080]
在其中一个实施例中,控制组件上还设有显示部件。显示部件与测距组件200信号连接,且能够接受信号组件统计的圈数与计算得到的距离。
[0081]
在其中一个优选的实施例中,控制组件上还包括微调部件。微调部件用于微调轨道用测距仪上测量组件在轨道上的线轨道上的相对位置,进而调整测距轮210实际转动的圈数,提高测量数据的准确性。
[0082]
上述轨道用测距仪,通过控制组件控制驱动组件的工作状态与驱动速度,提高了仪器设备的自动化程度,解除了操作人员与驱动组件的绑定关系,仅通过远程控制即能够操作驱动组件,便于实现任意位置处对驱动部件的灵活控制,进一步降低了仪器设备的操作难度。
[0083]
在其中一个实施例中,如图1、图2、图3与图7所示,上述轨道用测距仪还包括清障组件600。其中,清障组件600用于清除轨道的上表面测距组件200前方的障碍物。
[0084]
其中一个优选的实施例中,清障组件600为沿测距组件200移动方向向前下方延伸的板状结构,且该板状结构抵接至轨道800的上表面。
[0085]
其中一个优选的实施例中,如图7所示,板状结构为中间高两侧低的异形板,通过该异形板将轨道表面的障碍物从轨道两侧清离。
[0086]
为保证清障组件的有效性,在其中一个优选的实施例中,清障组件600与轨面间隙小于等于2mm。
[0087]
上述轨道用测距仪,通过清障组件清除轨道表面的障碍物,排除轨面障碍物对轨道用测距仪的测量精度的影响,防止测距组件运动过程中发生抖动造成测量结果不准确,同时还可避免由于障碍物导致的轨道轮运行不稳导致的轨道轮脱轨,也即提高轨道运测距仪运行过程中的稳定性。
[0088]
在其中一个详细的实施例中,上述轨道用测距仪的使用步骤为:
[0089]
步骤1:将轨道用测距仪放置与轨道上表面,调节轨道用测距仪,使其中心线在轨道中心线重合;
[0090]
步骤2:通过轨道轮的调节螺栓,调节第一轨道与第二轨道轮之间的间距,使得第一轨道的表面及第二轨道轮的表面与轨道表面完全贴合。
[0091]
步骤3:通过限位组件的调节螺栓及腰型孔调节第一限位轮与第二限位轮的位置。
[0092]
步骤4:打开测距组件和控制组件,待测距组件、驱动组件与控制组件自动连接后,观察测距组件与控制组件数据显示是否正常,并测试控制组件对驱动组件的各项控制模块是否正常。
[0093]
步骤5:待各项控制模块正常后,将轨道用测距仪调节至轨道上的起点处,使测距轮垂直中心线与测量起点重合。
[0094]
步骤6:通过控制组件数据归零,调整驱动速度的大小与驱动速度的方向,启动前进键。
[0095]
步骤7:接近终点时,启动暂停键,并微量调节测距轮位置,使测距轮垂直中心线与终点重合。
[0096]
步骤8:通过控制组件存储测量结果。
[0097]
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
[0098]
以上所述实施例仅表达了本实用新型的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对实用新型专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干变形和改进,这些都属于本实用新型的保护范围。因此,本实用新型专利的保护范围应以所附权利要求为准。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 测距仪

 热门咨询
热门咨询




tips