
 商标分类
商标分类  商标转让
商标转让 
一种电动汽车用线驱动柔性充电枪及充电方法与流程
 2021-02-03 15:02:10|
2021-02-03 15:02:10| 258|
258| 起点商标网
起点商标网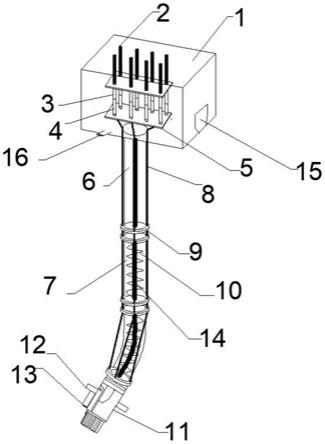
[0001]
本发明涉及充电枪领域,特别是涉及一种电动汽车用线驱动柔性充电枪及 充电方法。
背景技术:
[0002]
2015年,印发的《关于加快电动汽车充电基础设施建设的指导意见》,指 出充电基础设施是为电动汽车提供电能补给的各类充换电设施,是新型的城市 基础设施。电动汽车的充电枪是充电基础设施的核心部件,其性能直接影响电 动汽车充电效率。
[0003]
现有的充电枪面临以下几个关键问题:(1)充电枪多为手动模式。 如果为电动汽车充电,需要将充电枪从固定充电桩取出,手动插入电动汽 车充电口;充电完成后,仍需手动将充电枪拔出并放回固定充电桩,自动 化水平低;(2)若采用自动充电枪,受制于驱动机械臂和充电线等结构 的重力作用,必然会导致充电执行过程功耗增大,降低电动汽车充电效 率;(3)现在个人卫生防疫防控面临诸多挑战,而充电枪的人为操作必 然会造成感染几率增加。
技术实现要素:
[0004]
本发明的目的是提供一种电动汽车用线驱动柔性充电枪及充电方法,实现 充电枪的轻量化和自动化。
[0005]
为实现上述目的,本发明提供了如下方案:
[0006]
一种电动汽车用线驱动柔性充电枪,包括:控制箱、控制箱摄像头、驱动 模块、刚性管、柔性机械臂、驱动绳索、充电枪头以及充电线;
[0007]
所述控制箱与所述驱动模块连接,所述控制箱用于控制所述驱动模块带动 所述柔性机械臂以及所述充电枪头运动;
[0008]
所述控制箱摄像头位于所述控制箱表面,并与所述控制箱连接;所述控制 箱摄像头用于获取待充电车辆的位置以及充电口的位置;
[0009]
所述驱动模块内置于所述控制箱,所述驱动模块与所述驱动绳索连接;
[0010]
所述刚性管与所述控制箱的底座固定连接;
[0011]
所述柔性机械臂与所述刚性管连通;所述柔性机械臂与所述刚性管采用线 驱动形式;
[0012]
所述驱动绳索与所述柔性机械臂的柔性关节连接;所述驱动绳索在所述驱 动模块的驱动下控制所述柔性机械臂伸缩;
[0013]
所述充电枪头位于所述柔性机械臂底部,并通过所述充电线与电源连接。
[0014]
可选的,所述驱动模块包括:驱动电机、联轴器、丝杠以及固定板;
[0015]
所述驱动电机的输入轴与所述控制箱连接,所述驱动电机的输出轴与所述 联轴器连接,所述驱动电机用于将所述电力扭矩传递至所述联轴器;
[0016]
所述联轴器与所述丝杠连接,所述联轴器将接收的所述电力扭矩传递至所 述丝
杠,所述丝杠将所述电力扭矩转化为直线方向的力或力矩;
[0017]
所述丝杠固定在所述固定板上,所述丝杠与所述驱动绳索连接。
[0018]
可选的,所述柔性机械臂包括:关节盘和弹簧;
[0019]
所述关节盘位于所述柔性机械臂的柔性关节处,且与所述驱动绳索连接;
[0020]
所述弹簧设置在所述柔性机械臂内部,所述弹簧用于支撑所述柔性机械 臂。
[0021]
可选的,所述的电动汽车用线驱动柔性充电枪还包括:充电枪搭载摄像头;
[0022]
所述充电枪搭载摄像头设置在所述充电枪头上,并与所述控制箱连接;所 述充电枪搭载摄像头用于获取所述充电口的位置。
[0023]
可选的,所述的电动汽车用线驱动柔性充电枪还包括:收纳模块;
[0024]
所述收纳模块位于所述控制箱的侧面上,所述控制箱用于在所述充电枪头 未工作时,为所述充电枪头提供安置空间。
[0025]
可选的,所述的电动汽车用线驱动柔性充电枪还包括:挡板;
[0026]
所述挡板设置在所述充电枪头上,所述挡板用于将所述充电枪头固定在所 述收纳模块上。
[0027]
一种电动汽车用线驱动柔性充电枪的充电方法,包括:
[0028]
获取待充电车辆的位置和充电口的位置;
[0029]
当所述待充电车辆的位置在设定范围内时,控制驱动模块开始工作,将所 述充电枪头从收纳模块中脱离;
[0030]
根据所述待充电车辆的位置和所述充电口的位置,控制所述驱动模块带动 柔性机械臂摆动,使所述充电枪头向所述充电口的位置运动;
[0031]
当所述充电枪头距离所述充电口的位置小于距离阈值时,利用所述驱动模 块使所述充电枪头静止状态;
[0032]
利用充电枪搭载摄像头获取充电口的位置图像;
[0033]
根据所述充电口的位置图像,调整所述充电枪头与所述充电口的相对位 置;
[0034]
根据所述相对位置进行所述充电枪头与所述充电口对接。
[0035]
根据本发明提供的具体实施例,本发明公开了以下技术效果:
[0036]
本发明所提供的一种电动汽车用线驱动柔性充电枪及充电方法,利用绳线 驱动方式驱动柔性机械臂,可以实现机械臂的多自由度运动,能够在空间范围 内灵活运动。柔性机械臂实现结构材质的一体化和轻量化设计,从而对驱动电 机提供的驱动力要求更小,机械臂的弯曲运动更灵活轻便。解决了传统的充电 装置,需要人员从充电桩取下充电枪,为电动汽车充电的问题。提高电动汽车 充电的自动化水平。
附图说明
[0037]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施 例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是 本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性 的前提下,还可以根据这些附图获得其他的附图。
[0038]
图1为本发明所提供的一种电动汽车用线驱动柔性充电枪结构示意图。
具体实施方式
[0039]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清 楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是 全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造 性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0040]
本发明的目的是提供一种电动汽车用线驱动柔性充电枪及充电方法,实现 充电枪的轻量化和自动化。
[0041]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和 具体实施方式对本发明作进一步详细的说明。
[0042]
图1为本发明所提供的一种电动汽车用线驱动柔性充电枪结构示意图,如 图1所示,本发明所提供的一种电动汽车用线驱动柔性充电枪,包括:控制箱 1、控制箱摄像头16、驱动模块、刚性管6、柔性机械臂7、驱动绳索8、充电 枪头11以及充电线14。
[0043]
所述控制箱1与所述驱动模块连接,所述控制箱1用于控制所述驱动模块 带动所述柔性机械臂7以及所述充电枪头11运动。所述驱动模块输出电力扭 矩,是柔性机械臂7运动的动力源。
[0044]
所述控制箱摄像头16位于所述控制箱1表面,并与所述控制箱1连接; 所述控制箱摄像头16用于获取待充电车辆的位置以及充电口的位置。
[0045]
所述驱动模块内置于所述控制箱1,所述驱动模块与所述驱动绳索8连接。
[0046]
所述刚性管6与所述控制箱1的底座固定连接。所述刚性管6减少一部分 柔性机械臂7的运动距离,降低控制难度,所述刚性管6的内部中空用于充电 线14穿过。
[0047]
所述柔性机械臂7与所述刚性管6连通;所述柔性机械臂7与所述刚性管 6采用线驱动形式。柔性机械臂7可在空间内各个角度进行伸缩弯曲运动,带 动充电线14和充电枪头11到达车辆充电口位置。
[0048]
所述驱动绳索8与所述柔性机械臂7的柔性关节连接;所述驱动绳索8 在所述驱动模块的驱动下控制所述柔性机械臂7伸缩。
[0049]
所述充电枪头11位于所述柔性机械臂7底部,并通过所述充电线14与电 源连接。
[0050]
作为一个具体的实施例,所述驱动模块包括:驱动电机2、联轴器3、丝 杠4以及固定板5。
[0051]
所述驱动电机2的输入轴与所述控制箱1连接,所述驱动电机2的输出轴 与所述联轴器3连接,所述驱动电机2用于将所述电力扭矩传递至所述联轴器 3。
[0052]
所述联轴器3与所述丝杠4连接,所述联轴器3将接收的所述电力扭矩传 递至所述丝杠4,所述丝杠4将所述电力扭矩转化为直线方向的力或力矩。
[0053]
所述丝杠4固定在所述固定板5上,所述丝杠4与所述驱动绳索8连接。
[0054]
作为一个具体的实施例,所述柔性机械臂7包括:关节盘9和弹簧10。
[0055]
所述关节盘9位于所述柔性机械臂7的柔性关节处,且与所述驱动绳索8 连接。
[0056]
所述弹簧10设置在所述柔性机械臂7内部,所述弹簧10用于支撑所述柔 性机械臂7。
[0057]
作为一个具体的实施例,所述的电动汽车用线驱动柔性充电枪还包括:充 电枪搭载摄像头13。
[0058]
所述充电枪搭载摄像头13设置在所述充电枪头11上,并与所述控制箱1 连接;所述充电枪搭载摄像头13用于获取所述充电口的位置。
[0059]
作为一个具体的实施例,所述的电动汽车用线驱动柔性充电枪还包括:收 纳模块15。
[0060]
所述收纳模块15位于所述控制箱1的侧面上,所述控制箱1用于在所述 充电枪头11未工作时,为所述充电枪头11提供安置空间。
[0061]
作为一个具体的实施例,所述的电动汽车用线驱动柔性充电枪还包括:挡 板12。
[0062]
所述挡板12设置在所述充电枪头11上,所述挡板12用于将所述充电枪 头11固定在所述收纳模块15上。
[0063]
本发明所提供的一种电动汽车用线驱动柔性充电枪的充电方法,包括:
[0064]
s1,获取待充电车辆的位置和充电口的位置。
[0065]
s2,当所述待充电车辆的位置在设定范围内时,控制驱动模块开始工作, 将所述充电枪头11从收纳模块15中脱离。
[0066]
s3,根据所述待充电车辆的位置和所述充电口的位置,控制所述驱动模块 带动柔性机械臂7摆动,使所述充电枪头11向所述充电口的位置运动。
[0067]
s4,当所述充电枪头11距离所述充电口的位置小于距离阈值时,利用所 述驱动模块使所述充电枪头11静止状态。
[0068]
s5,利用充电枪搭载摄像头13获取充电口的位置图像。
[0069]
s6,根据所述充电口的位置图像,调整所述充电枪头11与所述充电口的 相对位置。
[0070]
s7,根据所述相对位置进行所述充电枪头11与所述充电口对接。
[0071]
作为一个具体的实施例,一种电动汽车用线驱动柔性充电枪的充电方法, 具体包括以下步骤:
[0072]
1、当待充电车辆停靠在停车位后,控制箱摄像头16检测到待充电车辆及 其充电口位置,控制的第二个柔性关节段的第二排驱动电机2开始转动,充电 枪头11开始从收纳模块15自动脱出。
[0073]
2、根据检测到的充电口位置信息,柔性机械臂7开始摆动,每个柔性关 节段由四根驱动绳索8连接,每根绳索由一个驱动电机2控制,所以两个柔性 关节段由8个驱动电机2控制其运动。每个柔性关节段有两个自由度,控制该 柔性关节段的驱动电机2交替转动,控制其运动方向。通过驱动电机2的配合, 从而使两个柔性关节段运动配合在空间实现4自由度运动,使充电枪头11靠 近充电口。
[0074]
3、当充电枪靠近充电口,驱动电机2控制柔性关节段处于静止状态,柔 性机械臂7停止运动,位于充电枪上的摄像头检测充电口位置,从而控制驱动 电机2转速,使柔性机械臂7缓慢运动,调整充电枪头11与车辆充电口相对 位置,使其精确对准。
[0075]
4、精确对准后,驱动电机2控制柔性机械臂7继续运动,完成对接,进 行充电;
[0076]
5、充电完成后,控制充电枪退出充电口,然后再由驱动电机2控制柔性 机械臂7运动,使充电枪头11返回收纳模块15,柔性机械臂7一个工作过程 完成。
[0077]
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是 与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于 实施例公开的系
统而言,由于其与实施例公开的方法相对应,所以描述的比较 简单,相关之处参见方法部分说明即可。
[0078]
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施 例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的 一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变 之处。综上所述,本说明书内容不应理解为对本发明的限制。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips