
 商标分类
商标分类  商标转让
商标转让 
一种基于5G通信网络可远程视频传输的二轮机器人的制作方法
 2021-02-03 15:02:51|
2021-02-03 15:02:51| 250|
250| 起点商标网
起点商标网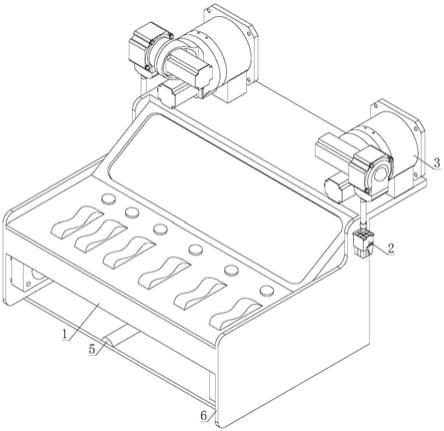
一种基于5g通信网络可远程视频传输的二轮机器人
技术领域
[0001]
本发明涉及二轮机器人技术领域,特别涉及一种基于5g通信网络可远程视频传输的二轮机器人。
背景技术:
[0002]
电子技术,信息技术在机器人方面的大量应用,使得机器人在自动控制方面有了深远的进步,进一步推动了机器人的技术朝着自动化,智能化的方向发展。虽然现在市场上的机器人琳琅满目,但是大多数都是三轮或者三轮以上的,极少数有两轮的机器人,因为两轮机器人是一个不稳定系统,需要一个稳定装置,否则就会跌倒。
[0003]
专利号为cn201020564272.1公开了一种惯性轮式二轮机器人稳定装置,包括自行车,在自行车上安装固定有、控制单元和稳定单元;检测单元由单轴陀螺仪传感器和三轴加速度传感器组成,稳定单元由平衡轮、540直流电机和h桥电机驱动电路组成,控制单元为单片机,根据检测单元测量计算获得自行车的侧向角度、角速度和角加速度,并将这些信息传送给控制单元,控制单元接收并处理上述信息后,计算得出自行车倾倒的方向和倾倒角度,然后向h桥电机驱动电路输出控制信号,使其驱动固定在车身上的直流电机向自行车倾倒的方向旋转,从而带动平衡轮旋转。平衡轮旋转时所产生的力矩与自行车的倾倒力矩相反,从而其与倾倒力矩相互抵消,使自行车保持平稳,不跌倒。
[0004]
专利号为cn201720297370.5公开了一种二轮机器人底盘结构,包括底盘、电池、万向轮、和一对对称分布的主动轮组,主动轮组包括电机、转角减速机、联轴器和行走轮,行走轮两侧设有一对轴承座,转角减速机与底盘上表面固定连接,电机竖直连接在转角减速机上方,行走轮和转角减速电机通过联轴器连接;底盘中心安装有正交码盘。
[0005]
但是上述专利中的二轮机器人分别通过转角减速器和平衡轮对二轮机器人的平衡进行调节,该调节只能维持机器人的静态平衡,当机器人所安装的多向旋转装置运行过程时,机器人本身的重心不断变化,导致二轮机器人无法维持动平衡,以及多向采集和高速传输。
技术实现要素:
[0006]
本发明的目的在于提供一种基于5g通信网络可远程视频传输的二轮机器人,利用5g通信网络接入端将视频传输至5g网络中,实现高效快速的远程视频传输;采用动平衡仪以固定频率监测机器人的平衡状态,并将平衡状态传输至控制中心,控制中心依据平衡状态控制平衡调节装置上的气缸组件进运行,维持机器人的动平衡,进而令机器人在二轮状态下移动,以解决上述背景技术中提出的问题。
[0007]
为实现上述目的,本发明提供如下技术方案:一种基于5g通信网络可远程视频传输的二轮机器人,包括控制中心、5g通信网络接入端、视频采集装置、机器人底盘、平衡仪器和机器人机壳,所述机器人机壳的中部安装有控制中心,上端设置有两个呈左右对称的视频采集装置,所述视频采集装置上设置有5g通信网络接入端,并通过5g通信网络接入端连
接5g通信网络,所述机器人机壳的下端设置有平衡仪器和机器人底盘,所述机器人底盘和平衡仪器相互连接;
[0008]
所述视频采集装置包括安装底座、旋转轴、主轴电机、副轴电机和摄像头,所述安装底座的中部旋转连接有旋转轴,并通过旋转轴旋转连接有主轴电机,所述主轴电机的一侧固定连接有副轴电机,所述副轴电机通过电机轴固定连接有摄像头,所述摄像头电性连接有5g通信网络接入端。
[0009]
进一步地,所述机器人底盘包括左轮驱动装置、右轮驱动装置和平衡调节装置,左轮驱动装置安装于机器人机壳的下底面左端,右轮驱动装置安装于机器人机壳的下底面右端,左轮驱动装置和右轮驱动装置之间固定连接有平衡调节装置。
[0010]
进一步地,所述左轮驱动装置包括左轮轮体、左轮安装板、左轮轮轴和左轮驱动组件,机器人机壳的下底面上通过螺栓固定连接有左轮安装板,左轮安装板上通过轴承旋转连接有左轮轮轴,并通过左轮轮轴旋转连接有左轮轮体,左轮轮轴的内侧设置有左轮驱动组件。
[0011]
进一步地,所述右轮驱动装置包括右轮轮体、右轮安装板、右轮轮轴和右轮驱动组件,机器人机壳的下底面上通过螺栓固定连接有右轮安装板,右轮安装板上通过轴承旋转连接有右轮轮轴,并通过右轮轮轴旋转连接有右轮轮体,右轮轮轴的内侧设置有右轮驱动组件。
[0012]
进一步地,所述左轮驱动组件和右轮驱动组件的结构一致,左左轮驱动组件包括主齿轮、链条、副齿轮和运行电机,左轮轮轴和右轮轮轴上均固定连接有副齿轮,机器人机壳上安装有运行电机,运行电机的电机轴上固定连接有主齿轮,副齿轮和主齿轮之间通过链条连接,左轮轮轴和右轮轮轴的两端均焊接有限位板。
[0013]
进一步地,所述平衡调节装置包括横梁、后气缸组件、前气缸组件、前滚轴、后滚轴、调节气缸组件和调节气缸连接组件,横梁的前侧设置有前气缸组件,并通过前气缸组件连接有前滚轴,后侧设置有后气缸组件,并通过后气缸组件连接有后滚轴,后滚轴、前滚轴以及横梁的两端均安装有调节气缸组件,调节气缸组件通过调节气缸连接组件连接有机器人机壳。
[0014]
进一步地,所述调节气缸连接组件包括侧耳、下销轴、摇臂和上销轴,调节气缸组件的顶端通过螺栓锁紧连接有两个侧耳,两个侧耳之间旋转连接有下销轴,下销轴通过摇臂固定连接有上销轴,上销轴通过螺栓固定连接于机器人机壳上。
[0015]
进一步地,所述机器人底盘包括左轮驱动装置、右轮驱动装置、平衡调节装置和换向装置,机器人机壳的下端安装有换向装置,换向装置的左端设置有左轮驱动装置,右端设置有右轮驱动装置,且换向装置的中部下端固定连接有平衡调节装置。
[0016]
进一步地,所述换向装置包括连杆、传动杆、导向杆和换向电机,换向电机的电机轴固定连接有导向杆,导向杆固定连接于传动杆中部,传动杆的两端分别通过一根连杆固定连接有左轮安装板和右轮安装板。
[0017]
进一步地,所述平衡仪器为py-2700g的动平衡仪。
[0018]
与现有技术相比,本发明的有益效果是:
[0019]
1、本发明提出的一种基于5g通信网络可远程视频传输的二轮机器人,通过可多向旋转的摄像头采集视频,并利用5g通信网络接入端将视频传输至5g网络中,实现高效快速
的远程视频传输。
[0020]
2、本发明提出的一种基于5g通信网络可远程视频传输的二轮机器人,采用动平衡仪以固定频率监测机器人的平衡状态,并将平衡状态传输至控制中心,控制中心依据平衡状态控制平衡调节装置上的气缸组件进运行,维持机器人的动平衡,进而令机器人在二轮状态下移动。
附图说明
[0021]
图1为本发明的基于5g通信网络可远程视频传输的二轮机器人的整体结构图;
[0022]
图2为本发明的基于5g通信网络可远程视频传输的二轮机器人的机器人机壳结构图;
[0023]
图3为本发明的基于5g通信网络可远程视频传输的二轮机器人的视频采集装置组装图;
[0024]
图4为本发明的基于5g通信网络可远程视频传输的二轮机器人的视频采集装置分解图;
[0025]
图5为本发明实施例一中的基于5g通信网络可远程视频传输的二轮机器人的机器人底盘结构图;
[0026]
图6为本发明的基于5g通信网络可远程视频传输的二轮机器人的左轮驱动装置结构图;
[0027]
图7为本发明的基于5g通信网络可远程视频传输的二轮机器人的右轮驱动装置结构图;
[0028]
图8为本发明的基于5g通信网络可远程视频传输的二轮机器人的左轮驱动组件结构图;
[0029]
图9为本发明的基于5g通信网络可远程视频传输的二轮机器人的平衡调节装置结构图;
[0030]
图10为本发明的基于5g通信网络可远程视频传输的二轮机器人的调节气缸连接组件结构图;
[0031]
图11为本发明实施例二中的基于5g通信网络可远程视频传输的二轮机器人的机器人底盘结构图。
[0032]
图中:1、控制中心;2、5g通信网络接入端;3、视频采集装置;31、安装底座;32、旋转轴;33、主轴电机;34、副轴电机;35、摄像头;4、机器人底盘;41、左轮驱动装置;411、左轮轮体;412、左轮安装板;413、左轮轮轴;414、左轮驱动组件;4141、主齿轮;4142、链条;4143、副齿轮;4144、运行电机;415、限位板;42、右轮驱动装置;421、右轮轮体;422、右轮安装板;423、右轮轮轴;424、右轮驱动组件;43、平衡调节装置;431、横梁;432、后气缸组件;433、前气缸组件;434、前滚轴;435、后滚轴;436、调节气缸组件;437、调节气缸连接组件;4371、侧耳;4372、下销轴;4373、摇臂;4374、上销轴;44、换向装置;441、连杆;442、传动杆;443、导向杆;444、换向电机;5、平衡仪器;6、机器人机壳。
具体实施方式
[0033]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完
整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0034]
实施例一
[0035]
参阅图1至图4,一种基于5g通信网络可远程视频传输的二轮机器人,包括控制中心1、5g通信网络接入端2、视频采集装置3、机器人底盘4、平衡仪器5和机器人机壳6,机器人机壳6的中部安装有控制中心1,上端设置有两个呈左右对称的视频采集装置3,视频采集装置3上设置有5g通信网络接入端2,并通过5g通信网络接入端2连接5g通信网络,机器人机壳6的下端设置有平衡仪器5和机器人底盘4,机器人底盘4和平衡仪器5相互连接;平衡仪器5为py-2700g的动平衡仪。
[0036]
视频采集装置3包括安装底座31、旋转轴32、主轴电机33、副轴电机34和摄像头35,安装底座31的中部旋转连接有旋转轴32,并通过旋转轴32旋转连接有主轴电机33,主轴电机33的一侧固定连接有副轴电机34,副轴电机34通过电机轴固定连接有摄像头35,摄像头35电性连接有5g通信网络接入端2。
[0037]
参阅图5至图8,机器人底盘4包括左轮驱动装置41、右轮驱动装置42和平衡调节装置43,左轮驱动装置41安装于机器人机壳6的下底面左端,右轮驱动装置42安装于机器人机壳6的下底面右端,左轮驱动装置41和右轮驱动装置42之间固定连接有平衡调节装置43。
[0038]
左轮驱动装置41包括左轮轮体411、左轮安装板412、左轮轮轴413和左轮驱动组件414,机器人机壳6的下底面上通过螺栓固定连接有左轮安装板412,左轮安装板412上通过轴承旋转连接有左轮轮轴413,并通过左轮轮轴413旋转连接有左轮轮体411,左轮轮轴413的内侧设置有左轮驱动组件414。
[0039]
右轮驱动装置42包括右轮轮体421、右轮安装板422、右轮轮轴423和右轮驱动组件424,机器人机壳6的下底面上通过螺栓固定连接有右轮安装板422,右轮安装板422上通过轴承旋转连接有右轮轮轴423,并通过右轮轮轴423旋转连接有右轮轮体421,右轮轮轴423的内侧设置有右轮驱动组件424;
[0040]
左轮驱动组件414和右轮驱动组件424的结构一致,左左轮驱动组件414包括主齿轮4141、链条4142、副齿轮4143和运行电机4144,左轮轮轴413和右轮轮轴423上均固定连接有副齿轮4143,机器人机壳6上安装有运行电机4144,运行电机4144的电机轴上固定连接有主齿轮4141,副齿轮4143和主齿轮4141之间通过链条4142连接,运行电机4144带动主齿轮4141旋转,主齿轮4141通过链条4142带动副齿轮4143和左轮轮轴413或右轮轮轴423旋转,驱动轮体转动,机器人移动,左轮轮轴413和右轮轮轴423的两端均焊接有限位板415,限位板415用于限位,避免副齿轮4143、左轮安装板412或右轮安装板422从左轮轮轴413上滑脱。
[0041]
参阅图9至图10,平衡调节装置43包括横梁431、后气缸组件432、前气缸组件433、前滚轴434、后滚轴435、调节气缸组件436和调节气缸连接组件437,横梁431的前侧设置有前气缸组件433,并通过前气缸组件433连接有前滚轴434,后侧设置有后气缸组件432,并通过后气缸组件432连接有后滚轴435,后滚轴435、前滚轴434以及横梁431的两端均安装有调节气缸组件436,调节气缸组件436通过调节气缸连接组件437连接有机器人机壳6,通过调节后气缸组件432和前气缸组件433的长度,调节前滚轴434和后滚轴435的位置,利用杠杆原理,配合机器人的偏移状态进行配重;调节气缸连接组件437包括侧耳4371、下销轴4372、
摇臂4373和上销轴4374,调节气缸组件436的顶端通过螺栓锁紧连接有两个侧耳4371,两个侧耳4371之间旋转连接有下销轴4372,下销轴4372通过摇臂4373固定连接有上销轴4374,上销轴4374通过螺栓固定连接于机器人机壳6上。
[0042]
实施例二
[0043]
参阅图1至图4,一种基于5g通信网络可远程视频传输的二轮机器人,包括控制中心1、5g通信网络接入端2、视频采集装置3、机器人底盘4、平衡仪器5和机器人机壳6,机器人机壳6的中部安装有控制中心1,上端设置有两个呈左右对称的视频采集装置3,视频采集装置3上设置有5g通信网络接入端2,并通过5g通信网络接入端2连接5g通信网络,机器人机壳6的下端设置有平衡仪器5和机器人底盘4,机器人底盘4和平衡仪器5相互连接;平衡仪器5为py-2700g的动平衡仪。
[0044]
视频采集装置3包括安装底座31、旋转轴32、主轴电机33、副轴电机34和摄像头35,安装底座31的中部旋转连接有旋转轴32,并通过旋转轴32旋转连接有主轴电机33,主轴电机33的一侧固定连接有副轴电机34,副轴电机34通过电机轴固定连接有摄像头35,摄像头35电性连接有5g通信网络接入端2。
[0045]
参阅图11,机器人底盘4包括左轮驱动装置41、右轮驱动装置42、平衡调节装置43和换向装置44,机器人机壳6的下端安装有换向装置44,换向装置44的左端设置有左轮驱动装置41,右端设置有右轮驱动装置42,且换向装置44的中部下端固定连接有平衡调节装置43。
[0046]
换向装置44包括连杆441、传动杆442、导向杆443和换向电机444,换向电机444的电机轴固定连接有导向杆443,导向杆443固定连接于传动杆442中部,传动杆442的两端分别通过一根连杆441固定连接有左轮安装板412和右轮安装板422,换向电机444带动导向杆443旋转,进而带动传动杆442摆动,从而调节左轮安装板412和右轮安装板422的偏移状态,实现转弯。
[0047]
左轮驱动装置41包括左轮轮体411、左轮安装板412、左轮轮轴413和左轮驱动组件414,左轮安装板412上通过轴承旋转连接有左轮轮轴413,并通过左轮轮轴413旋转连接有左轮轮体411,左轮轮轴413的内侧设置有左轮驱动组件414。
[0048]
右轮驱动装置42包括右轮轮体421、右轮安装板422、右轮轮轴423和右轮驱动组件424,右轮安装板422上通过轴承旋转连接有右轮轮轴423,并通过右轮轮轴423旋转连接有右轮轮体421,右轮轮轴423的内侧设置有右轮驱动组件424。
[0049]
左轮驱动组件414和右轮驱动组件424的结构一致,左左轮驱动组件414包括主齿轮4141、链条4142、副齿轮4143和运行电机4144,左轮轮轴413和右轮轮轴423上均固定连接有副齿轮4143,机器人机壳6上安装有运行电机4144,运行电机4144的电机轴上固定连接有主齿轮4141,副齿轮4143和主齿轮4141之间通过链条4142连接,运行电机4144带动主齿轮4141旋转,主齿轮4141通过链条4142带动副齿轮4143和左轮轮轴413或右轮轮轴423旋转,驱动轮体转动,机器人移动;左轮轮轴413和右轮轮轴423的两端均焊接有限位板415,限位板415用于限位,避免副齿轮4143、左轮安装板412或右轮安装板422从左轮轮轴413上滑脱。
[0050]
参阅图9至图10,平衡调节装置43包括横梁431、后气缸组件432、前气缸组件433、前滚轴434、后滚轴435、调节气缸组件436和调节气缸连接组件437,横梁431的前侧设置有前气缸组件433,并通过前气缸组件433连接有前滚轴434,后侧设置有后气缸组件432,并通
过后气缸组件432连接有后滚轴435,后滚轴435、前滚轴434以及横梁431的两端均安装有调节气缸组件436,调节气缸组件436通过调节气缸连接组件437连接有机器人机壳6,通过调节后气缸组件432和前气缸组件433的长度,调节前滚轴434和后滚轴435的位置,利用杠杆原理,配合机器人的偏移状态进行配重;调节气缸连接组件437包括侧耳4371、下销轴4372、摇臂4373和上销轴4374,调节气缸组件436的顶端通过螺栓锁紧连接有两个侧耳4371,两个侧耳4371之间旋转连接有下销轴4372,下销轴4372通过摇臂4373固定连接有上销轴4374,上销轴4374通过螺栓固定连接于机器人机壳6上。
[0051]
综上所述:本发明提出的一种基于5g通信网络可远程视频传输的二轮机器人,通过可多向旋转的摄像头35采集视频,并利用5g通信网络接入端2将视频传输至5g网络中,实现高效快速的远程视频传输;采用动平衡仪以固定频率监测机器人的平衡状态,并将平衡状态传输至控制中心1,控制中心1依据平衡状态控制平衡调节装置43上的气缸组件进运行,维持机器人的动平衡,进而令机器人在二轮状态下移动。
[0052]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips