
 商标分类
商标分类  商标转让
商标转让 
一种座椅自动调节方法与流程
 2021-02-03 15:02:13|
2021-02-03 15:02:13| 418|
418| 起点商标网
起点商标网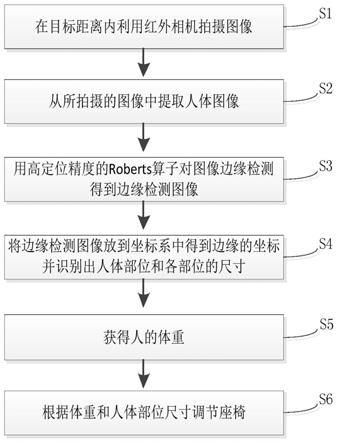
[0001]
本发明涉及智能化座椅技术领域,特别是涉及一种座椅自动调节方法。
背景技术:
[0002]
根据座椅的人机工程学可知,一个合格的座椅应该本着这样的原则:在参照人体数据的基础上首先应能让乘客保持良好的坐姿,脊柱接近于自然弯曲状态,座椅靠背的造型和曲线应该与人体放松状态下的曲面吻合,并合理的支撑腰椎部位,大腿前端与座椅之间的压力应尽量减少,以免血液循环不良引起的麻木。
[0003]
在现有的座椅中,座椅的高度、椅背的倾斜角度大多是乘客自己在乘坐初期进行调节,而调节的标准多是依靠乘客自己主观的判断满足其一定的舒适度即可,这种主观判断准确性低,特别是对于汽车上使用的座椅,其不仅要满足乘客长时间乘坐的舒适性,长时间驾驶的抗疲劳性,还要在突发安全事故时保护乘客免受伤或者减少伤害,所以座椅能否给腰部提供舒适的支撑以及坐垫深度是否符合乘客的大腿尺寸等是关键控制因素。
技术实现要素:
[0004]
针对现有技术中的上述问题,本发明提供了一种座椅自动调节方法,解决了现有技术中手动调节座椅高度和椅背角度费时费力且无法科学控制调节程度的问题。
[0005]
为了达到上述发明目的,本发明采用的技术方案如下:
[0006]
提供一种座椅自动调节方法,其包括以下步骤:
[0007]
s1,利用红外距离传感器检测是否有人进入目标距离内,若有人进入则输出预设的姿态调整语音播报,利用红外相机拍摄图像;
[0008]
s2,通过消噪和图像增强对图像进行预处理,根据预设的人体温度阈值对图像进行提取得到人体图像;
[0009]
s3,用高定位精度的roberts算子对图像边缘检测,然后进行灰度阈值处理,基于图像识别需要,选取适当阈值t,对图像进行阈值判决,除去不必要的冗余信息,得到最终的边缘检测图像;
[0010]
s4,将得到的边缘检测图像放到直角坐标系中,得到图像边缘的坐标,根据坐标计算图像相邻边缘的宽度,并与预存的人体数据对比识别出人体部位,同时根据坐标值计算得到身高、腿长和臂长;
[0011]
s5,根据安装于座椅中的称重传感器得到人的体重;
[0012]
s6,根据人的身高、腿长、臂长和体重计算得出座椅的高度、靠背的倾斜角度以及座椅的水平位置,然后控制座椅上的高度调节器、角度调节器和滑动装置将座椅调节到目标状态和目标位置。
[0013]
本发明的有益效果为:能够自动、科学地根据每位乘客的身高、腿长、臂长和体重调节座椅的高度、靠背的倾斜角度以及座椅的水平位置,免去了人手动调节的麻烦,使用更加方便、智能,长时间乘坐舒适性更佳,对于像主驾驶位的汽车座椅,使驾驶者与刹车、油门
和方向盘之间的位置更加符合人机工程学,提高了抗疲劳性和安全性。
附图说明
[0014]
图1为座椅自动调节方法的流程图。
具体实施方式
[0015]
下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
[0016]
如图1所示,该座椅自动调节方法包括以下步骤:
[0017]
s1,利用红外距离传感器检测是否有人进入目标距离内,若有人进入则输出预设的姿态调整语音播报,利用红外相机拍摄图像。
[0018]
对于普通座椅,可以将红外距离传感器和红外相机安装于座椅的椅背上对靠近的人进行检测,当人的距离小于等于1米后,总控制器控制播放器播放预设的语音信息,语音信息包括让乘客正对红外相机、手臂倾斜向下并与身体分开以及双腿分开,使得手臂的轮廓不会与身体的轮廓重复,两腿之间的轮廓不会重复,以便于后续对图像进行边缘识别;人体正对红外相机使得拍出来的图像是正视状态,以便于后续能够准确地通过相邻轮廓之间的宽度识别人体部位,因为如果人体如果倾斜,得到的相邻轮廓之间的宽度会偏小而低于预设的人体数据,会导致人体部位无法识别出来。
[0019]
在姿态调整语音播报结束后,间隔一定时间后,该时间通常为1~2分钟,以留给乘客足够的姿态调整时间,再控制红外相机拍摄图像。红外相机采用的是热成像技术,通过红外相机将物体发出的不可见红外能量转变为可见的热图像,热图像上面的不同颜色代表被测物体的不同温度,使得到的图像的边缘相较于普通图像边缘更加清晰,更容易识别。
[0020]
s2,通过消噪和图像增强对图像进行预处理,根据预设的人体温度阈值对图像进行提取得到人体图像。
[0021]
对图像消噪之前识别噪声点的方法为:
[0022]
从图像中获取任意一个目标像素点x(i,j),以目标像素点为中心,获得邻域s,计算邻域s内全部像素的均值m、均方差σ,计算x(i,j)与均值m之间的偏差σx,若在邻域s内至少一个以上的像素点y(i,j)与x(i,j)间的偏差σy<σx,则x(i,j)为图像的边缘点,否则x(i,j)为噪声点。然后采用p-m扩散方程法去噪,p-m扩散方程由热传导方程发展而来,而基于热传导方程的图像去噪原理类似于高斯滤波公式,是各向异性扩散方程,在去噪的同时会模糊了图像的边缘,而p-m方程将图像不同区域的特征与扩散过程联系起来,即沿各方向的扩散系数不为常数,而是随着图像的梯度模值而变化,所以既能去除噪声,也能保护边缘不被平滑,使得去噪过程不会影响图像的边缘。
[0023]
红外成像中,不同的温度对应与不同的颜色,红色、粉红表示比较高的温度,蓝色和绿色表示较低的温度,温度阈值对应于一个颜色范围,通过提取该颜色范围内的图像来完成对人体图像的提取。人体的体温高于环境温度,保证在红外相机拍摄范围内仅存在乘客,能够降低人体图像提取难度,提高准确性。
[0024]
s3,用高定位精度的roberts算子对图像边缘检测,然后进行灰度阈值处理,基于图像识别需要,选取适当阈值t,对图像进行阈值判决,除去不必要的冗余信息,得到最终的边缘检测图像。
[0025]
roberts算子对图像边缘检测的具体方法如下:假设图像像素值为f(i,j),用绝对值代替微分近似有:g(i,j)=[f(i,j)-f(i+1,j+1)]+[f(i+1,j)-f(i,j+1)];用卷积模板表示,gx和gy的卷积算子分别为
[0026]
s4,将得到的边缘检测图像放到直角坐标系中,得到图像边缘的坐标,即任意边缘点均对应于一个x轴和y轴坐标值,根据坐标计算图像相邻边缘的宽度,具体地,以同一y轴坐标下,不同的x轴坐标代表水平方向上不同的位置,比如手臂处,最左端边缘x坐标代表右手的外边缘,与其相邻的是右手的内边缘,通过内边缘x坐标减去右手外边缘x坐标即为该y坐标处手臂的宽度(忽略手臂倾斜造成的误差)。同理,可得出整个边缘检测图像在任意y坐标上相邻两个x坐标之间的差值,该差值也就是相邻两个边缘的宽度。预存的人体数据是指通过统计得出的人体一些部位的普遍宽度,比如手臂的宽度、腰部的宽度、头部的宽度、腿部的宽度等。
[0027]
将相邻两个边缘的宽度与预存的人体数据对比识别出人体部位,同时根据坐标值计算得到身高、腿长和臂长。判断出人体部位以后,比如大腿,可以结合大腿部位的y坐标最大值与最小值的差值得出大腿的长度。同理得出身高、腿长和臂长。
[0028]
s5,根据安装于座椅中的称重传感器得到人的体重。乘客在被红外相机拍照以后坐到座椅上,座椅上的称重传感器称量得到乘客的体重,根据体重与乘客身高的比例可以推算出乘客的身形。
[0029]
s6,根据人的身高、腿长、臂长和体重计算得出座椅的高度、靠背的倾斜角度以及座椅的水平位置,然后控制座椅上的高度调节器、角度调节器和滑动装置将座椅调节到目标状态和目标位置,座椅的高度调节器、角度调节器和滑动装置具体设置可参考电动调节的汽车座椅的设置。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips