
 商标分类
商标分类  商标转让
商标转让 
无人车停靠方法、控制装置及存储介质与流程
 2021-02-03 15:02:39|
2021-02-03 15:02:39| 283|
283| 起点商标网
起点商标网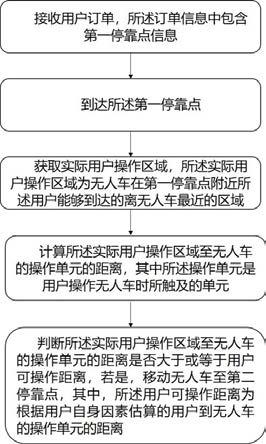
[0001]
本发明涉及无人车领域,更具体地,涉及一种无人车停靠方法、控制装置及存储介质。
背景技术:
[0002]
无人车,即为无人驾驶汽车,是由计算机控制的无人操控汽车的简称。无人车可以通过自身安装的传感器设备检测周边的环境,自主完成路径规划,并最终抵达预订的目的地。与普通汽车比较,无人驾驶汽车可以通过选择安装gps设备,惯性导航元器件,雷达设备,编码器,摄像头及其他视觉设备等,对自身位置姿态判断并检测周围环境,最终辅助无人车进行移动。然而现有无人车在移动过程,检测周围环境,也仅仅检测与安全相关的信息,目的也是为了安全,不会考虑用户的体验,这对于无人车,尤其是作为无人零售车,无人配送车是远远不够的。
技术实现要素:
[0003]
为了解决上述技术问题,本发明提供了一种一种无人车停靠方法,其特征在于,包括:接收用户订单,所述订单信息中包含第一停靠点信息;到达所述第一停靠点;获取实际用户操作区域,所述实际用户操作区域为无人车在第一停靠点附近所述用户能够到达的离无人车最近的区域;计算所述实际用户操作区域至无人车的操作单元的距离,其中所述操作单元是用户操作无人车时所触及的单元;判断所述实际用户操作区域至无人车的操作单元的距离是否大于或等于用户可操作距离,若是,移动无人车至第二停靠点,其中,所述用户可操作距离为根据用户自身因素估算的用户到无人车的操作单元的距离。
[0004]
进一步地,所述用户可操作距离根据订单信息中的用户信息计算得出的或为预先存储在无人车中的距离或由无人车上的传感器获得。
[0005]
进一步地,所述获取实际用户操作区域,包括:获取无人车附近的环境信息,基于环境信息计算获得用户能够到达的离无人车最近的区域。
[0006]
进一步地,所述环境信息包括阻碍所述用户到达无人车的障碍物信息。
[0007]
进一步地,所述障碍物信息包括水坑信息、泥坑信息、污垢信息、路面平整度信息和/或无人车与用户之间的高度落差信息。
[0008]
进一步地,其特征在于,所述由无人车上的传感器获得用户可操作距离包括:通过所述传感器获取所述用户的身高和/或运动方式的特点,根据所述身高和/或运动方式的特点推算所述用户的可操作距离;
和/或所述根据订单信息中的用户信息计算得出用户可操作距离包括通过订单信息获取所述用户的购买清单及习惯,根据所述购买清单及习惯推测所述用户的特征,并根据所述用户特征调取所述可操作性距离。
[0009]
进一步地,所述操作单元为根据所述订单信息获取所述用户的购买物品预测所述用户待使用的操作单元。
[0010]
进一步地,所述计算所述实际用户操作区域至无人车的操作单元的距离为l1与l3的加和;所述l1为实际用户操作区域至无人车的距离,所述l3为所述待使用操作单元的深度。另一方面,提供一种无人车停靠控制装置,包括:接收单元,用于接收用户的订单;获取单元,用于获取用户的可操作距离及根据所述订单信息获取在第一待停靠点时所述用户至无人车操作单元的距离;处理单元,根据所述可操作距离及所述用户至无人车操作单元的距离,判断所述第一待停靠点是否满足停靠条件;若判断所述第一待停靠点满足停靠条件,则控制所述无人车在所述第一待停靠点停靠,若判断所述第一待停靠点不满足停靠条件,则获取满足所述停靠条件的第二待停靠点,并控制所述无人车在所述第二待停靠点停靠。
[0011]
另一方面,提供一种计算机可读存储介质,所述计算机可读存储介质存储程序或指令,所述程序或指令使计算机执行上述方法的步骤。
[0012]
本发明的无人车停靠方法充分考虑用户的使用体验,改善用户的体验效果,从而提高无人车的运营效率。
[0013]
本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在说明书、权利要求书以及附图中所特别指出的结构来实现和获得。
附图说明
[0014]
附图用来提供对本发明技术方案的进一步理解,并且构成说明书的一部分,与本申请的实施例一起用于解释本发明的技术方案,并不构成对本发明技术方案的限制。
[0015]
图1是本发明一个实施例的方法流程图。
具体实施方式
[0016]
为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合本发明实施例的附图,对本发明实施例的技术方案进行清楚、完整地描述。显然,所描述的实施例是本发明的一部分实施例,而不是全部的实施例。基于所描述的本发明的实施例,本领域普通技术人员在无需创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
[0017]
无人车可以包括无人售卖车,无人配送车或无人出租车,只要是需要用户与无人车进行实际操作交互的均可,在此不做明确限定。为了方便理解,以下实施例均以无人售卖车为例。
[0018]
图1 展示了本实施例一种无人车停靠方法的流程图,该方法包括:s100:接收用户订单,所述订单信息中包含第一停靠点信息。
[0019]
具体地,用户可以通过app、招手或语音等方式向无人车发出需要进行购物的信息,即订单,但是此时的具体购买信息可等车辆停靠后用户通过扫码在客户端操作或者直接在无人车的屏幕上进行操作,如用户站在a点,向无人车招手,则认为该订单仅仅是购买要约,也为订单的一种;或者用户通过app直接发出订单,该订单中可包含用户的位置,用户的购买物品,用户所在位置的等信息。
[0020]
s200:到达所述第一停靠点根据所述订单信息中的第一停靠点信息,到达所述第一停靠点。
[0021]
s300:获取实际用户操作区域,所述实际用户操作区域为无人车在第一停靠点附近所述用户能够到达的离无人车最近的区域具体地,订单用户在a点进行招手(即订单),则认为a点(也包含无限靠近a点周围)为第一待停靠点;如用户通过app下单的订单中输入的某商场北门口,则该北门口为第一待停靠点;或者用户没有输入地点,根据app订单中用户的定位位置为第一待停靠点。
[0022]
进一步地,根据订单信息,到达所述第一待停靠点附近(只要能够获知第一停靠点的周围环境,如是否有水潭,泥潭等即可),根据附近的情况获取实际用户操作区域,所述实际用户操作区域为无人车在第一停靠点附近所述用户能够到达的离无人车最近的区域,即预测所述用户需要与所述无人车之间间隔多远才可以规避该水潭或泥潭等。也就是说,当所述第一停靠点周围环境中存在水潭、泥潭等不方便用户踩踏的地方,当无人车停靠在第一停靠点时,用户为了规避该水潭或泥潭等,用户会远离所述无人车,即用户至无人车操作单元的距离会发生变化。当不存在泥潭等障碍物时,认为所述用户可无限靠近无人车。
[0023]
s400:计算所述实际用户操作区域至无人车的操作单元的距离,其中所述操作单元是用户操作无人车时所触及的单元所述操作单元包括但不限于车辆操作屏幕、货架以及出货口等,只要涉及用户与无人车单元的交互操作均可为操作单元。
[0024]
当操作单元为多个,如既包括屏幕及货架等,所述可操作距离需同时满足可对所有该操作单元进行操作,避免用户虽然可以对屏幕进行操作,但是无法对货架等其他操作单元进行操作,影响使用。再例如,当所述订单为用户招手使无人车前往的情况,由于无法确定用户具体要操作哪个操作单元,为了避免用户有踩踏水潭或泥潭等可能,所述操作单元确定为无人车所有操作单元中深度最大的操作单元。
[0025]
s500:判断所述实际用户操作区域至无人车的操作单元的距离是否大于或等于用户可操作距离,若是,移动无人车至第二停靠点,其中,所述用户可操作距离为根据用户自身因素估算的用户到无人车的操作单元的距离。
[0026]
具体地,所述可操作距离为用户本身可够到所述操作单元的长度,可以为所述用户的臂长或者通过弯腰加上臂长的距离等,即用户通过自身胳膊可伸长的距离。所述可操作距离为用户能够对无人车操作单元进行操作的最大距离,即一旦超过该操作距离,用户无法进行操作。
[0027]
例如,如果当无人售卖车在第一待停靠点停靠后,用户的可操作距离为30厘米(即最长为30厘米),但是实际用户操作区域至无人车的操作单元的距离为35厘米(即用户面对无人车的出货口,与出货口之间的距离),此时第一待停靠点则不满足停靠条件,也就说此处停车,用户无法顺利取货,需移动到满足此条件的第二停靠点。如果当无人售卖车在第一
待停靠点停靠后,用户的可操作距离为30厘米,实际用户操作区域至无人车出货口距离为25厘米,所述用户可对所述无人车进行操作,即可进行取货,则该地点适合停靠。
[0028]
本申请充分考虑订单信息,尤其是第一待停靠点周围的环境,如第一停靠或其周边有水潭,泥潭等不适合用户踩踏的障碍物(该障碍物可能不影响车辆行驶的安全性),一旦车辆停靠在此处,该障碍物,如水潭会位于用户与无人车之间,那么该水潭可能会影响用户对操作单元的操作,如该水潭较小,用户胳膊比较长,用户不用踩着该水潭也可以进行操作,但是如果水潭较大,或者用户胳膊较短,则用户一旦需要对无人车的操作单元进行操作的话,则需要踩到水潭里,这对于用户来说不但不方便,而且可能造成危险。通过本停靠方法,可以确保无人车运营场景的合理性,提高用户的体验感及安全性。
[0029]
本发明的另一个实施例中,所述用户可操作距离根据订单信息中的用户信息计算得出的或为预先存储在无人车中的距离或由无人车上的传感器获得。
[0030]
具体地,无人售卖车可以提前存储一个用户的可操作距离,如50厘米;也可以是通过所述传感器获取所述用户的身高和/或运动方式的特点,根据所述身高和/或运动方式的特点推算所述用户的可操作距离(除了身高以外,该可操作距离可能也与用户的运动状态相关,所述运动状态包括走路、骑车、坐轮椅等,尤其是乘坐轮椅时等,可根据该状态推算其可操作距离。如用户做了轮椅后的人胳膊的位置可能低于所述操作单元,需要向上伸长胳膊才可以操作所述操作单元,其能够达到的可操作距离与站立的人可达到的可操作单元也会有区别。);也可以是通过订单信息获取所述用户的购买清单及习惯,根据所述购买清单及习惯推测所述用户的特征,并根据所述用户特征调取所述可操作性距离。
[0031]
具体地,所述用户特点可根据无人售卖车直接对所述用户采集的信息确定,如无人售卖车上的摄像头等传感器捕获的图像信息确定;也可根据所述订单信息调取所述用户的过往购买记录或个人信息,确定所述用户的特点,如购买的多为护肤品、女性产品,则推断该用户为女性,根据一般女性的特征推测其可操作距离。同时,可以预先存储不同用户特点对应的可操作距离,如身高150-160cm的用户对应的可操作距离为75cm;身高为161-170cm的用户对应的可操作距离为85cm;女性对应的可操作距离为70cm;男性对应的可操作距离为80cm;如坐轮椅的用户的可操作距离为50cm等。通过获取的用户特点,在数据库中匹配出对应的可操作距离即可。
[0032]
本发明的另一实施例中,所述获取实际用户操作区域,包括:获取无人车附近的环境信息,基于环境信息计算获得用户能够到达的离无人车最近的区域。
[0033]
所述环境信息包括天气情况,历史存储的所述地点的地面特点,无人售卖车到达所述位置后采集的路况及地面信息,尤其是该位置或该位置周围的情况,如是否有水潭等阻碍用户到达无人车附近的障碍物(具体地,有些障碍物虽然存在,但是其不会阻碍所述用户靠近所述操作单元,如第一待停靠点有障碍物,但是该障碍物为一块转,人是可以踩到上边的,其则不会阻碍所述用户靠近操作单元;如所述障碍物为木板,该障碍物同样不会阻碍所述用户靠近操作单元。),如果有,进一步检测所述水潭的尺寸大小,确定其具体的阻碍距离(指的是无人车的操作单元一侧到用户的方向)。
[0034]
所述障碍物信息包括但不限于水坑信息、泥坑信息、污垢信息、路面平整度信息和/或无人车与用户之间的高度落差信息,只要能够阻碍用户到达无人车附近即可。例如,路面凹凸度较大,人站立上边会有摔倒的可能,站不稳;或者车辆较低,用户较高,如车辆1
米,而人因为脚底下有台阶等原因高度可达到2.5米,那么用户取货也会有障碍;路面有粪便或者其他不可踩踏的垃圾等。
[0035]
本发明的另一实施例中,所述操作单元为根据所述订单信息获取所述用户的购买物品预测所述用户待使用的操作单元。
[0036]
如用户需购买一瓶水,而本无人售卖车的水从饮料出货口统一拿取,则可预测该用户的操作单元为出货口;如果订单信息中又有水,也有餐食,而餐食是售卖车打开柜门,从货架上拿取,则可预测该用户的操作单元为饮料出货口及货架;如用户的订单为招手停车,其并未包含所买物品,则预测所述用户所要操作的操作单元为深度最深的操作单元,这样即便用户操作深度较浅的单元,也可以够到。
[0037]
本发明的另一实施例中,所述计算所述实际用户操作区域至无人车的操作单元的距离为l1与l3的加和;所述l1为实际用户操作区域至无人车的距离,所述l3为所述待使用操作单元的深度。
[0038]
具体地,车辆停靠后,人与车辆之间可能会有障碍物,该障碍物可以是不影响车辆行驶安全的障碍物,也可以是影响车辆行驶的障碍物,但是该障碍物会影响用户靠近车辆。如水潭,泥潭等,当其处于用户与无人车之间时,用户无法直接踩在该障碍物上,此时,实际用户操作区域到所述无人车的操作单元的距离不可能是0,其至少需加上所述障碍物的宽度,如水潭或泥潭的宽度。所述操作单元的深度指的是车辆一侧(车辆靠近用户的一侧)至用户达到所述操作单元最深处的距离,如所述操作单元为货架,除了要拿取货架口的货物,还需伸手拿取货架里边的货物(即远离所述货架口的一侧),则需考虑货架的深度。如所述实际用户操作区域与所述无人车之间的障碍物的宽度(即无人车的操作单元一侧到用户的方向)为30厘米,所述货架的深度为30厘米,则所述实际用户操作区域至所述无人车操作单元的距离为60厘米。当所述用户与无人车之间无所述障碍物时,认为所述实际用户操作区域至所述无人车的操作单元的距离仅考虑操作单元的深度,认为人可以无限靠近所述无人车的操作单元。例如,当所述操作单元为无人车外表面的屏幕,即深度为0,且用户与无人车之间无所述障碍物,则认为所述实际用户操作区域至所述无人车操作单元的距离为0。
[0039]
进一步地,所述方法还包括获取所述操作单元的待操作区域,根据所述待操作区域的深度,确定所述实际用户操作区域至所述无人车操作单元的距离。
[0040]
例如所述操作单元为货架,其总深度为40厘米,放2排货物,当取第一排货物时,第一排则为待操作区域,那么此时的操作深度可定义为20厘米;当第一排货物取完时,进入第二排货物取放时,此时的操作深度为40cm。通过进一步实时获取所述货物的位置,从而获取待操作区域的深度,可以更加准确的确定车辆的待停靠点。
[0041]
本发明的另一实施例中,所述若判断所述第一停靠点不满足停车条件,则获取满足所述停靠条件的第二待停靠点,并控制所述无人车在所述第二停靠点停车包括:根据所述第一待停靠点,获取与所述第一停靠点距离最近的满足停靠条件的第二停靠点进行停靠。
[0042]
具体地,可以以第一停靠点为圆心,寻找离所述第一停靠点最近的满足停靠条件的第二停靠点。这样对于用户来说,不用移动很远的距离,即可到达所述无人车。
[0043]
本发明的另一实施例,还提供一种无人车停靠的控制装置,包括:接收单元,用于接收用户的订单,所述订单信息中包含第一停靠点信息;
控制单元,控制所述无人车到达所述第一停靠点;获取单元,获取实际用户操作区域,所述实际用户操作区域为无人车在第一停靠点附近所述用户能够到达的离无人车最近的区域;计算单元,计算所述实际用户操作区域至无人车的操作单元的距离,其中所述操作单元是用户操作无人车时所触及的单元;处理单元,判断所述实际用户操作区域至无人车的操作单元的距离是否大于或等于用户可操作距离,若是,移动无人车至第二停靠点,其中,所述用户可操作距离为根据用户自身因素估算的用户到无人车的操作单元的距离。
[0044]
本发明的另一实施例提供一种计算机可读存储介质,所述计算机可读存储介质存储程序或指令,所述程序或指令使计算机执行上述方法的步骤。
[0045]
虽然本发明所揭露的实施方式如上,但所述的内容仅为便于理解本发明而采用的实施方式,并非用以限定本发明。任何本发明所属领域内的技术人员,在不脱离本发明所揭露的精神和范围的前提下,可以在实施的形式及细节上进行任何的修改与变化,但本发明的专利保护范围,仍须以所附的权利要求书所界定的范围为准。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 无人驾驶汽车

 热门咨询
热门咨询




tips