
 商标分类
商标分类  商标转让
商标转让 
一种考虑路面状况的自动驾驶控制策略调整方法与流程
 2021-02-03 15:02:08|
2021-02-03 15:02:08| 240|
240| 起点商标网
起点商标网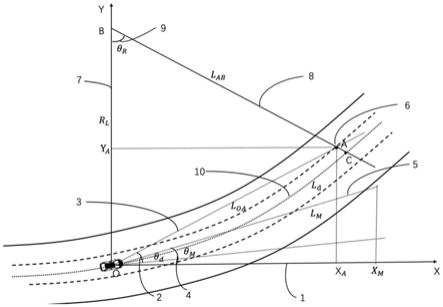
[0001]
本发明涉及汽车主动安全领域,尤其是指一种考虑路面状况的自动驾驶控制策略调整方法。
背景技术:
[0002]
公路路面裂缝、坑洞等病害严重影响行车舒适性和安全性,随着人工智能技术的发展,智能路面病害检测技术日趋成熟,从而大大降低了传统的检测方法造成的大量人工成本和车辆运行成本。如果将智能路面病害检测技术融入到自动驾驶车辆系统中,通过识别出前方道路存在的路面病害,车辆即可在综合考虑交通信息和路面实际情况的基础上,提出整体驾驶策略。因此,设计一种考虑路面状况的自动驾驶控制策略调整方法,能够有效提升自动驾驶车辆在遇到路面病害时车辆行驶的安全性和舒适性。
技术实现要素:
[0003]
本发明提出了一种考虑路面状况的自动驾驶控制策略调整方法,能够计算出车载摄像头在不同半径的平曲线上行驶时的有效视距,以现有路面病害智能检测技术为基础,根据不同病害对车辆驾驶行为影响的差异,控制策略模块针对不同道路病害和车辆周围交通状况为车辆选择相应的车辆控制策略,并通过车辆控制模块实现对车辆驾驶行为的控制,能够有效的提高车辆在遇到不同道路病害情况下驾驶的舒适性和安全性。
[0004]
本发明考虑路面状况的自动驾驶控制策略调整方法包括有效视距计算模块、路面智能检测模块、控制策略模块、车辆控制模块。
[0005]
一种考虑路面状况的自动驾驶控制策略调整方法,其特征在于,包括如下步骤:
[0006]
a.有效视距计算模块基于车载摄像头计算出车载摄像头的有效视距,并将计算出的有效视距输入控制策略模块。
[0007]
b.路面智能检测模块将检测结果输入控制策略模块,控制策略模块根据病害检测结果判断出有病害发生时,则根据当前车辆运行状态数据计算出车辆减速至期望速度所需距离,并与车载摄像头有效视距做对比;若车辆减速至期望速度所需距离小于车载摄像头有效视距时,根据病害类型在控制策略库中选取相应的车辆控制策略;若车辆减速至期望车速所需距离大于车载摄像头有效视距时,则采取控制策略库中的预减速纵向控制策略。
[0008]
c.将选取的控制策略输入车辆控制模块,采用pid控制方法实现各策略对车辆的纵向控制和横向控制。
[0009]
有效视距计算模块执行下述步骤:
[0010]
以车辆当前位置所处车道中线为坐标原点o建立xy坐标,其中x轴由车辆出发指向车道直线与缓和曲线交接处直线延长线方向,y轴由车辆出发指向x轴逆时针旋转90度的方向。
[0011]
计算以视频检测设备视野角为夹角的延长线与车辆所处车道的车道边缘的交点坐标a,公式如下:
[0012][0013]
其中,x
a
为a点在x轴上对应坐标值,y
a
为a点在y轴上对应坐标值,θ
d
为车载摄像头的最大视野角,可由摄像头的参数直接获取,θ
m
为车载摄像头的水平视距线与x轴夹角,l
m
为车载摄像头的最远检测水平视距,可由摄像头的参数直接获取,x
m
为车载摄像头的最远检测水平视距l
m
在x轴上的投影与x轴的交点坐标值,l
l
为车道宽度,可由道路设计标准直接确定,一般可取3.5米,r
l
为道路的平曲线半径可由公式计算得出。
[0014]
计算原点o与a点之间的距离,公式如下:
[0015][0016]
其中,l
oa
为原点o与a点之间的距离,x
a
为a点在x轴上对应坐标值,y
a
为a点在y轴上对应坐标值。
[0017]
计算平曲线半径r
l
,该值的计算可由车辆当前轮胎转角推算得出,计算步骤如下:
[0018]
由方向盘转角推算出轮胎转角,公式如下:
[0019][0020]
计算一段时间内轮胎的平均转角,公式如下:
[0021][0022]
计算平曲线半径值,公式如下:
[0023][0024]
其中,r
l
为平曲线半径值,r
or
为车辆行驶轨迹的弧长,v
c
为车辆行驶速度,可由车辆can线获取,t
h
为计算道路平曲线半径所采集历史数据的时间间隔,一般可设为1秒,为车辆中心在t
h
时间内的平均转向角,t0为现在时刻前t
h
时的时刻,为t时刻车辆的转向角,f
c
为车辆can线数据采集频率,为t时刻方向盘的转向角,ω
in
为车辆内侧车轮最大转向角,ω
out
为车辆外侧车轮最大转向角,ω
max
为方向盘最大转向角。
[0025]
计算过a点的延长线与平曲线半径的交点b之间的距离,公式如下:
[0026][0027]
其中,l
ab
为点a、b之间的距离,r
l
为平曲线半径,l
l
为车道宽度可由道路设计标准直接确定,一般可取3.5米。
[0028]
采用余弦公式计算出之间的夹角,公式如下:
[0029]
[0030]
其中,θ
r
为l
ab
、r
l
之间的夹角,x
a
为a点在x轴上对应坐标值,y
a
为a点在y轴上对应坐标值,r
l
为平曲线半径,l
l
为车道宽度可由道路设计标准直接确定,一般可取3.5米。
[0031]
计算角θ
r
对应的弧长0c即为车载摄像头有效视距,公式如下:
[0032]
l
d
=r
l
θ
r
[0033]
其中,l
d
为车载摄像头有效视距,r
l
为平曲线半径,θ
r
为l
ab
、r
l
之间的夹角。
[0034]
路面智能检测模块采用路面病害检测算法识别路面病害,并将检测结果存入病害信息列表,病害信息列表包括病害标识字段用d
o
表示、病害类型字段用d
t
表、病害影响车道字段用d
l
表示。
[0035]
其中病害标识字段d
o
记录是否检测到病害,1为发现病害,0为未发现病害;病害类型字段d
t
包含病害类型如下:“pavementmarking”为路面标线,“brokenmarking”为破损标线,“patch”为大面积修补,“pothole”为路面坑槽,“welllid”为井盖,“crack”为路面裂缝,“sealedcrack”为裂缝修补。
[0036]
其中轻微病害包括“brokenmarking”、“patch”、“sealedcrack”、“welllid”,中等病害包括“crack”,严重病害包括“pothole”。
[0037]
控制策略模块的输入数据为病害信息列表,当d
o
=0时,保持原有控制策略;当d
o
=1且d
l
包含车辆行驶车道时,计算车辆从当前行驶速度减速到期望速度所需的距离l
s
,若l
s
<l
d
则分病害类型从控制策略库中选取相应的车辆控制策略,若l
s
>l
d
则采取控制策略库中的预减速纵向控制策略。
[0038]
控制策略库包含不同病害类型下对车辆的横向和纵向控制策略,横向控制策略是采用pid控制方法对车辆的转角速度进行控制的策略,纵向控制策略是采用pid控制方法对车辆的速度进行控制的策略,具体内容包括:
[0039]
若d
l
包含车辆行驶车道且d
t
=“pavementmarking”,则保持原控制策略。
[0040]
若d
l
包含车辆行驶车道且d
t
=“brokenmarking”或“patch”或“sealedcrack”或“welllid”,则k时刻采取纵向控制策略,增量式pid控制方法所需的加速度变化值δa(k)计算公式如下:
[0041][0042]
其中,为轻微病害影响下的比例系数,为轻微病害影响下的积分系数,为轻微影病害响下的微分系数,为轻微病害影响下的期望车速,以上系数可根据车辆动力学参数通过实验方式获取,v(k)为车辆k时刻速度,t为采样时间间隔。
[0043]
若d
l
包含车辆行驶车道且d
t
=“crack”,则k时刻采取纵向控制策略,增量式pid控制方法所需的加速度变化值δa计算公式如下:
[0044][0045]
其中,为中等病害影响下的比例系数,为中等病害影响下的积分系数,
为中等病害影响下的微分系数,为中等病害影响下的期望车速,以上系数可根据车辆动力学参数通过实验方式获取,v(k)为车辆k时刻速度,t为采样时间间隔,取值范围为[0.1,1],单位为秒。
[0046]
若d
l
包含车辆行驶车道且d
t
=“pothole”,则k时刻采取横向控制策略和纵向控制策略,将病害的检测信息按车道进行划分,格式为:[s
l2
,s
l1
,s
m
,s
r1
,s
r2
],车辆当前所处车道为s
m
车道时,各种情况下车辆的横、纵向控制策略如下表:
[0047][0048]
其中,s
l2
为中间车道左侧第二条车道,s
l1
中间车道左侧第一条车道,s
m
为中间车道,s
r1
为中间车道右侧第一条车道,s
r2
为中间车道右侧第二条车道。
[0049]
各项值域范围及含义如下:-1为超出检测范围,0为无病害,1为路面裂缝“crack”,2为坑槽“pothole”。
[0050]
若纵向控制策略为1级减速,则k时刻,增量式pid控制方法所需的加速度变化值δa计算公式如下:
[0051][0052]
其中,为轻微病害影响下的比例系数,为轻微病害影响下的积分系数,为轻微病害影响下的微分系数,为轻微病害影响下的期望车速,以上系数可由该系数可根据车辆动力学参数通过实验方式获取,v(k)为车辆k时刻速度,t为采样时间间隔,取值范围为[0.1,1],单位为秒。
[0053]
若纵向控制策略为2级减速,则k时刻,增量式pid控制方法所需的加速度变化值δa计算公式如下:
[0054][0055]
其中,为严重病害影响下的比例系数,为严重病害影响下的积分系数,为严重病害影响下的微分系数,为严重病害影响下的期望车速,以上系数可根据车辆动力学参数通过实验方式获取,v(k)为车辆k时刻速度,t为采样时间间隔,取值范围为[0.1,1],单位为秒。
[0056]
当控制策略中涉及车道变换时需要进行横向控制,则k时刻,增量式pid控制方法所需的转角速度变化值计算公式如下:
[0057][0058]
其中,为车辆转向的比例系数,为车辆转向的积分系数,为车辆转向的微分系数,为车辆转向的期望车速,以上系数可根据车辆动力学参数通过实验方式获取,ω(k)为车辆k时刻速度,t为采样时间间隔,取值范围为[0.1,1],单位为秒。
[0059]
可由下式计算得出:
[0060][0061]
其中,n
l
为变向车道数,l
l
为车道宽度,l
d
为有效检测视距。
[0062]
当采用预减速控制策略进行纵向控制,则k时刻,增量式pid控制方法所需的加速度变化值δa计算公式如下:
[0063][0064]
其中,为预减速控制策略的比例系数,为预减速控制策略的积分系数,为预减速控制策略的微分系数,以上系数可根据车辆动力学参数通过实验方式获取,ρ一般取0.9,v
ahead
(k)为前车车速,v(k)为车辆k时刻速度,t为采样时间间隔,取值范围为[0.1,1],单位为秒。
[0065]
横向控制策略受视距遮挡和无可插入间隙的影响,视距遮挡是指当车辆的实际检测视距小于车辆的有效检测视距,即车辆的检测视距受到了其他车辆的遮挡,这种情况下受视距遮挡影响的车道以及该条车道同向上的其他车道,车道病害检测信息为-1,即超出检测范围;无可插入间隙是指临近的第一车道不满足车辆变道所需的安全插入间隙,这种情况下无可插入间隙的车道及其同方向上的其他车道,车道病害检测信息为-1,即超出检测范围。
[0066]
车辆控制模块包括横向控制子模块和纵向控制子模块,纵向控制子模块的输入数
据为δa(k),横向控制子模块的输入值为
[0067]
横向控制子模块当收到控制量δa(k)后,若δa(k)>0则为油门控制,这根据传动比、伺服电机每转一圈所需的驱动脉冲数确定一个比例系数k
throttle-drive
,将控制量乘上该系数发送给伺服电机驱动器。
[0068]
若δa(k)<0则为制动控制,为了减少制动踏板的频繁抖动,按照模糊控制规则采用量化等级的值实施控制。
[0069]
下表所示含义为当控制量δa(k)的变化范围在“变化范围”各项的区域时,对应的量化等级值。
附图说明
[0070]
图1是考虑路面状况的自动驾驶控制策略调整方法结构图;
[0071]
图2是计算车载摄像头有效视距的示意图;
[0072]
图3是计算平曲线半径值的示意图;
[0073]
图4是确定x、y坐标轴的示意图;
[0074]
图5是pid控制流程图;
[0075]
图6时车辆变向车道数为2时的场景示意图;
[0076]
图7是车辆检测视线受其他车辆遮挡场景示意图;
[0077]
图8是车辆无可插入间隙场景示意图;
[0078]
图9是车辆纵向控制流程图。
具体实施方式
[0079]
以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
[0080]
作为本发明一实施例,如图1所示考虑路面状况的自动驾驶控制策略调整方法包括:有效视距计算模块101、路面智能检测模块102、控制策略模块103、车辆控制模块104。
[0081]
有效视距计算模块基于车载摄像头计算出车载摄像头的有效视距,并将计算出的有效视距输入所述控制策略模块。
[0082]
路面智能检测模块将检测结果输入控制策略模块,控制策略模块根据病害检测结果判断出前方道路有病害发生时,则根据当前车辆运行状态数据计算出车辆减速至期望速度所需距离,并与车载摄像头有效视距做对比;若车辆减速至期望速度所需距离小于车载摄像头有效视距时,根据病害类型在控制策略库中选取相应的车辆控制策略;若车辆减速至期望车速所需距离大于车载摄像头有效视距时,则采取控制策略库中的预减速纵向控制策略。
[0083]
选取的控制策略输入车辆控制模块,采用pid控制方法实现各策略对车辆的纵向控制和横向控制。
[0084]
有效视距计算模块执行下述步骤:
[0085]
以车辆当前位置所处车道中线为坐标原点o建立xy坐标(如图2中1所示),其中x轴由车辆出发指向车道直线(如图4中14所示)与缓和曲线(如图4中15所示)交接处(如图4中16所示)直线延长线方向(如图4中17所示),y轴由车辆出发指向x轴逆时针旋转90度的方向(如图4中18所示)。
[0086]
计算以视频检测设备视野角为夹角的延长线与车辆所处车道的车道边缘的交点坐标a(如图2中6所示),公式如下:
[0087][0088]
其中,x
a
为a点在x轴上对应坐标值,y
a
为a点在y轴上对应坐标值,θ
d
为车载摄像头的最大视野角(如图2中2所示),可由摄像头的参数直接获取,θ
m
为车载摄像头的水平视距线与x轴夹角(如图2中4所示),l
m
为车载摄像头的最远检测水平视距(如图2中5所示),可由摄像头的参数直接获取,x
m
为车载摄像头的最远检测水平视距l
m
在x轴上的投影与x轴的交点坐标值,l
l
为车道宽度,可由道路设计标准直接确定,一般可取3.5米,r
l
为道路的平曲线半径可由公式计算得出。
[0089]
计算原点o与a点之间的距离,公式如下:
[0090][0091]
其中,l
oa
为原点o与a点之间的距离3,x
a
为a点在x轴上对应的坐标值,y
a
为a点在y轴上对应的坐标值。
[0092]
平曲线半径r
l
(如图2中7所示),该值的计算可由车辆当前轮胎转角推算得出,而轮胎转角和方向盘转角之间存在对应关系,因此可通过获取车辆的方向盘转角间接获取到轮胎转角,计算步骤如下:
[0093]
由方向盘转角推算出轮胎转角公式如下:
[0094][0095]
计算一段时间内轮胎的平均转角公式如下:
[0096][0097]
计算平曲线半径值r
l
,公式如下:
[0098][0099]
其中,r
l
为平曲线半径值(如图3中13所示),r
or
为车辆行驶轨迹的弧长(如图3中12所示),v
c
为车辆行驶速度,可由车辆can线获取,t
h
为计算道路平曲线半径所采集历史数据的时间间隔,一般可设为1秒,为车辆中心在t
h
时间内的平均转向角(如图3中11所示),
t0为现在时刻前t
h
时的时刻,为t时刻车辆的转向角,f
c
为车辆can线数据采集频率,为t时刻方向盘的转向角,可由dbc协议文件获取,ω
in
为车辆内侧车轮最大转向角,可由dbc协议文件获取,ω
out
为车辆外侧车轮最大转向角,可由dbc协议文件获取,ω
max
为方向盘最大转向角,可由dbc协议文件获取。
[0100]
计算过a点的延长线与平曲线半径的交点b之间的距离,公式如下:
[0101][0102]
其中,l
ab
为点a、b之间的距离(如图2中8所示),r
l
为平曲线半径(如图2中7所示),l
l
为车道宽度可由道路设计标准直接确定,一般可取3.5米。
[0103]
采用余弦公式计算出r
l
、l
ab
之间的夹角,公式如下:
[0104][0105]
其中,θ
r
为r
l
、l
ab
之间的夹角(如图2中9所示),x
a
为a点在x轴上对应的坐标值,y
a
为a点在y轴上对应的坐标值,r
l
为平曲线半径7,l
l
为车道宽度可由道路设计标准直接确定,一般可取3.5米。
[0106]
计算角θ
r
对应的弧长0c(如图2中10所示)即为车载摄像头有效视距,公式如下:
[0107]
l
d
=r
l
θ
r
[0108]
其中,l
d
为车载摄像头有效视距(如图2中10所示),r
l
为平曲线半径(如图2中7所示),θ
r
为r
l
、l
ab
之间的夹角(如图2中9所示)。
[0109]
路面智能检测模块采用路面病害检测算法识别路面病害,并将检测结果存入病害信息列表,病害信息列表包括病害标识字段用d
o
表示、病害类型字段用d
t
表示、病害影响车道字段用d
l
表示。
[0110]
其中,病害标识字段d
o
记录是否检测到病害,1为发现病害,0为未发现病害;病害类型字段d
t
包含病害类型如下:“pavementmarking”为路面标线,“brokenmarking”为破损标线,“patch”为大面积修补,“pothole”为路面坑槽,“welllid”为井盖,“crack”为路面裂缝,“sealedcrack”为裂缝修补。
[0111]
其中轻微病害包括“brokenmarking”、“patch”、“sealedcrack”、“welllid”,中等病害包括“crack”,严重病害包括“pothole”。
[0112]
控制策略模块的输入数据为病害信息列表,当d
o
=0时,保持原有控制策略;当d
o
=1且d
l
包含车辆行驶车道时,计算车辆从当前行驶速度减速到期望速度所需的距离l
s
,若l
s
<l
d
则分病害类型从控制策略库中选取相应的车辆控制策略,若l
s
>l
d
则采取控制策略库中的预减速纵向控制策略。
[0113]
控制策略库包含不同病害类型下对车辆的横向和纵向控制策略,横向控制策略是采用pid控制方法对车辆的转角速度进行控制的策略,纵向控制策略是采用pid控制方法对车辆的速度进行控制的策略,pid控制过程如图5所示,具体内容包括:
[0114]
若d
l
包含车辆行驶车道且d
t
=“pavementmarking”,则保持原控制策略。
[0115]
若d
l
包含车辆行驶车道且d
t
=“brokenmarking”或“patch”或“sealedcrack”或“welllid”,则k时刻采取纵向控制策略,增量式pid控制方法所需的加速度变化值δa(k)计算公式如下:
[0116][0117]
其中,为轻微病害影响下的比例系数,为轻微病害影响下的积分系数,为轻微病害影响下的微分系数,为轻微病害影响下的期望车速,以上系数可根据车辆动力学参数通过实验方式获取,v(k)为车辆k时刻速度,t为采样时间间隔,取值范围为[0.1,1],单位为秒。
[0118]
若d
l
包含车辆行驶车道且d
t
=“crack”,则k时刻采取纵向控制策略,增量式pid控制方法所需的加速度变化值δa(k)计算公式如下:
[0119][0120]
其中,为中等病害影响下的比例系数,为中等病害影响下的积分系数,为中等病害影响下的微分系数,为中等病害影响下的期望车速,以上系数可根据车辆动力学参数通过实验方式获取,v(k)为车辆k时刻速度,t为采样时间间隔,取值范围为[0.1,1],单位为秒。
[0121]
若d
l
包含车辆行驶车道且d
t
=“pothole”,则k时刻采取横向控制策略和纵向控制策略,将病害的检测信息按车道进行划分,格式为:[s
l2
,s
l1
,s
m
,s
r1
,s
r2
],车辆当前所处车道为s
m
车道时,各种情况下车辆的横、纵向控制策略如下表:
[0122][0123]
其中,s
l2
为中间车道左侧第二条车道,s
l1
中间车道左侧第一条车道,s
m
为中间车道,s
r1
为中间车道右侧第一条车道,s
r2
为中间车道右侧第二条车道。
[0124]
各项值域范围及含义如下:-1为超出检测范围,0为无病害,1为路面裂缝crack,2为坑槽pothole。
[0125]
若纵向控制策略为1级减速,则k时刻,增量式pid控制方法所需的加速度变化值δa(k)计算公式如下:
[0126][0127]
其中,为轻微病害影响下的比例系数,为轻微病害影响下的积分系数,为轻微病害影响下的微分系数,为轻微病害影响下的期望车速,以上系数可根据车辆动力学参数通过实验方式获取,v(k)为车辆k时刻速度,t为采样时间间隔,取值范围为[0.1,1],单位为秒。
[0128]
若纵向控制策略为2级减速,则k时刻,增量式pid控制方法所需的加速度变化值δa(k)计算公式如下:
[0129][0130]
其中,为严重影响下的比例系数,为严重影响下的积分系数,为严重影响下的微分系数,为严重影响下的期望车速,以上系数可根据车辆动力学参数通过实验方式获取,v(k)为车辆k时刻速度,t为采样时间间隔,取值范围为[0.1,1],单位为秒。
[0131]
当控制策略中涉及车道变换时需要进行横向控制,则k时刻,增量式pid控制方法所需的转角速度变化值计算公式如下:
[0132][0133]
其中,为车辆转向的比例系数,为车辆转向的积分系数,为车辆转向的微分系数,为车辆转向的期望车速,以上系数可根据车辆动力学参数通过实验方式获取,ω(k)为车辆k时刻速度,t为采样时间间隔,取值范围为[0.1,1],单位为秒。
[0134]
可由下式计算得出:
[0135][0136]
其中,n
l
为变向车道数,l
l
为车道宽度,l
d
为有效检测视距,图6所示为变向车道数为2时的场景示意图。
[0137]
当采用预减速控制策略进行纵向控制,则k时刻,增量式pid控制方法所需的加速度变化值δa(k)计算公式如下:
[0138][0139]
其中,为预减速控制策略的比例系数,为预减速控制策略的积分系数,为预减速控制策略的微分系数,以上系数可根据车辆动力学参数通过实验方式获取,ρ一般取0.9,v
ahead
(k)为前车车速,v(k)为车辆k时刻速度,t为采样时间间隔,取值范围为[0.1,1],单位为秒。
[0140]
横向控制策略受视距遮挡和无可插入间隙的影响,视距遮挡是指当车辆的实际检测视距小于车辆的有效检测视距,即车辆的检测视距受到了其他车辆的遮挡,场景示意图如图7所示,受车辆b遮挡影响车辆a在所处车道的左侧车道方向上的视距减小,这种情况下受视距遮挡影响的车道以及该条车道同向上的其他车道,车道病害检测信息为-1,即超出检测范围。
[0141]
无可插入间隙是指临近的第一车道不满足车辆变道所需的安全插入间隙,场景示意图如图8所示,车辆b、c和车辆c、d的车辆间距较小,在到达前方路面病害之前不能提供给a车安全的可插入间隙,这种情况下无可插入间隙的车道及其同方向上的其他车道,车道病害检测信息为-1,即超出检测范围。
[0142]
车辆控制模块包括横向控制子模块和纵向控制子模块,纵向控制子模块的输入数据为δa(k),横向控制子模块的输入值为
[0143]
纵向控制子模块当收到控制量δa(k)后,若δa(k)>0则为油门控制,这根据传动比、伺服电机每转一圈所需的驱动脉冲数确定一个比例系数k
throttle-drive
,将控制量乘上该系数发送给伺服电机驱动器。
[0144]
若δa(k)<0则为制动控制,为了减少制动踏板的频繁抖动,按照模糊控制规则采用量化等级的值实施控制,控制流程如图9所示。
[0145]
下表所示含义为当控制量δa(k)的变化范围在“变化范围”各项的区域时,对应的量化等级值。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips