
 商标分类
商标分类  商标转让
商标转让 
一种汽车盲区检测报警方法及系统与流程
 2021-02-03 14:02:28|
2021-02-03 14:02:28| 259|
259| 起点商标网
起点商标网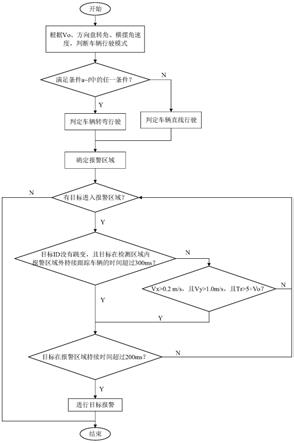
[0001]
本发明属于汽车电器领域,具体涉及一种汽车盲区检测报警方法及系统。
背景技术:
[0002]
在汽车智能化的大背景下,当前基于毫米波雷达的智能行车驾驶辅助系统,已经被广泛应用于各大品牌厂家的各种汽车车型,普及率显著提升,汽车用户对智能驾驶辅助越来越感兴趣,开始了解得更多,要求也更加高。作为智能驾驶辅助系统之一的盲区检测报警系统目前已经成为了乘用车的中高配车型甚至高端车型的标配。随着盲区检测报警系统的广泛应用,其面临的复杂多样的行驶环境,给适应体验能力带来了挑战。
[0003]
现有的盲区检测报警方法普遍存在以下缺点:1)车身、保险杠布置毫米波雷达的可视角度越来越宽泛,毫米波雷达的检测区域越来越大,毫米波雷达探测到车身两侧的干扰目标更多,时间更长,且毫米波雷达受其本身硬件参数性能的影响和限制,尤其在低成本的状态下难以达到理想的测距、测速和角度分辨率、精度。
[0004] 2)信噪(杂)比检测与常用的恒虚警率(cfar,constant false-alarm rate)检测在彻底消除环境的干扰后,会发生漏报警;此方法难以对具有相同真值属性的干扰目标进行剔除,不可避免地面对强干扰仍有较高的误报警率。
[0005] 3)通过频谱包络线及信噪(杂)比,单帧建立目标,多帧确认报警的方式,常规状态下能一定程度地提高盲区报警正确率,但在应对复杂路况信息(比如多径反射、弯道场景、不规则护栏、围档、路灯杆)时,仍难以解决真假目标在各个判断属性上的阈值交叉。
技术实现要素:
[0006]
本发明的目的是提供一种汽车盲区检测报警方法及系统,以降低在静止的护栏、围墙、隧道、路灯杆等容易产生误报警的环境下的误报警率。
[0007]
本发明所述的汽车盲区检测报警方法,包括:s1、根据车辆行驶的车速vo、方向盘转角、横摆角速度,判断车辆行驶模式,然后执行s2;其中,车辆行驶模式是指车辆直线行驶或者车辆转弯行驶;s2、根据车辆行驶模式和车辆行驶的车速vo,确定报警区域,然后执行s3;s3、判断是否有目标进入报警区域,如果是,则执行s4,否则结束;s4、判断目标是否有历史跟踪轨迹,如果是,则执行s6,否则执行s5;s5、判断目标是否满足二次筛选条件,如果是,则执行s6,否则返回执行s3;s6、判断目标在报警区域持续时间是否超过预设的第一时间阈值,如果是,则进行目标报警,然后结束,否则返回执行s3。
[0008]
优选的,所述根据车辆行驶的车速vo、方向盘转角、横摆角速度,判断车辆行驶模式的方式为:如果满足条件a~f中的任一条件,则判定车辆转弯行驶,否则判定车辆直线行驶;其中,
条件a为:横摆角速度大于预设的角速度阈值;条件b为:车速vo大于0且小于或等于预设的第一速度阈值,且方向盘转角大于或等于预设的第一转角阈值;条件c为:车速vo大于预设的第一速度阈值且小于或等于预设的第二速度阈值,且方向盘转角大于或等于预设的第二转角阈值;条件d为:车速vo大于预设的第二速度阈值且小于或等于预设的第三速度阈值,且方向盘转角大于或等于预设的第三转角阈值;条件e为:车速vo大于预设的第三速度阈值且小于或等于预设的第四速度阈值,且方向盘转角大于或等于预设的第四转角阈值;条件f为:车速vo大于预设的第四速度阈值,且方向盘转角大于或等于预设的第五转角阈值。
[0009]
所述根据车辆行驶模式和车辆行驶的车速vo,确定报警区域的方式为:如果车辆直线行驶,则确定所述报警区域为检测区域内由a、b、e、d、c点依次连接围成的五边形区域;如果车辆转弯行驶,则确定所述报警区域为检测区域内由a、b、c'、e'、d'点依次连接围成的五边形区域;其中,a点到车辆后视镜的横向距离为预设的第一宽度、纵向距离为预设的第一长度,b点到a点的横向距离为预设的第二宽度、纵向距离为0,c点到a点的横向距离为0,c点到车尾的纵向距离为预设的第二长度,d点到a点的横向距离为预设的第三宽度,d点到车尾的纵向距离为y,e点到a点的横向距离为预设的第二宽度,e点到车尾的纵向距离为y,c'点到a点的横向距离为预设的第二宽度,c'点到车尾的纵向距离为预设的第二长度,d'点到a点的横向距离为0,d'点到车尾的纵向距离为y,e'点到a点的横向距离为预设的第二宽度减预设的第三宽度,e'点到车尾的纵向距离为y,预设的第二宽度大于预设的第三宽度,预设的第三宽度大于预设的第一宽度,预设的第二长度大于预设的第一长度,y大于预设的第二长度,且y随车辆行驶的车速vo动态变化。
[0010]
所述y随车辆行驶的车速vo动态变化的方式为:当所述车速vo大于零且小于或等于预设的第五速度阈值v5时,y=(v5+13)
÷
7;当所述车速vo大于预设的第五速度阈值v5且小于或等于预设的第六速度阈值时,y=(vo+13)
÷
7;当所述车速vo大于预设的第六速度阈值且小于或等于预设的第七速度阈值v7时,y=vo
÷
18+5;当所述车速大于预设的第七速度阈值v7时,y=v7÷
18+5。
[0011]
优选的,若目标没有发生变化(即目标id没有跳变),且目标在检测区域内报警区域外持续跟踪车辆的时间超过预设的第二时间阈值,则判定目标有历史跟踪轨迹。
[0012]
若目标在报警区域内的横向(即x方向)速度分量vx大于预设的第一速度分量阈值,且纵向(即y方向)速度分量vy大于预设的第二速度分量阈值,且持续存在时间tr大于s
÷
vo,则判定目标满足二次筛选条件;其中,s表示预设的距离阈值。
[0013]
优选的,所述预设的第一时间阈值为200ms,所述预设的第二时间阈值为300ms,所述预设的角速度阈值为0.04
°
/s,所述预设的第一速度阈值为18km/h,所述预设的第二速度阈值为36km/h,所述预设的第三速度阈值为72km/h,所述预设的第四速度阈值为100km/h,所述预设的第五速度阈值v5为15km/h,所述预设的第六速度阈值为36km/h,所述预设的第七速度阈值v7为72km/h,所述预设的第一转角阈值为45
°
,所述预设的第二转角阈值为25
°
,所述预设的第三转角阈值为15
°
,所述预设的第四转角阈值为10
°
,所述预设的第五转角阈值为8
°
,所述预设的第一宽度为0,所述预设的第二宽度为3.5m,所述预设的第三宽度为0.5m,所述预设的第一长度为0,所述预设的第二长度为1m,所述预设的第一速度分量阈值为0.2m/s,所述预设的第二速度分量阈值为1m/s,所述预设的距离阈值s为5m。
[0014]
本发明所述的汽车盲区检测报警系统,包括毫米波雷达和与毫米波雷达连接的控
制器,所述控制器被编程以便执行上述汽车盲区检测报警方法。
[0015]
本发明具有如下效果:(1)不同的车辆行驶模式和车速,变换不同的报警区域形状,进而优化了不同形式场景下的报警区域。直线行驶模式下,减少了车辆在直线行驶时正后方目标因为横向速度偏移侵入盲区而产生误报警的几率;弯道行驶模式下,减少了车辆在靠近护栏等转弯行驶时,侧后方可能产生虚警目标的区域。其能适应车辆在不同行驶环境下的需求,有效降低了无关区域的干扰。
[0016]
(2)当车辆以大于零的速度靠近护栏等易误报场景行驶时,对没有历史跟踪轨迹,从车头进入或者从车侧横向切入突然出现在报警区域的目标(此类目标常因为护栏上的不规则金属强反射物或转弯时靠近静止的强反射物体产生相对运而出现),增加二次筛选条件,进一步降低了误报警率。
[0017]
(3)通过软件实现,简单有效,无需对检测报警系统做复杂的修改变更,即可降低在静止的护栏、围墙、隧道、路灯杆等容易产生误报警的环境下的误报警率;没有硬件或其他成本的增加,也提升了环境适应性能表现。
附图说明
[0018]
图1为本实施例中确定报警区域的示意图。
[0019]
图2为本实施例中纵向距离y随车辆行驶的车速vo动态变化的示意图。
[0020]
图3为本实施例中对目标进行横纵向速度分解的示意图。
[0021]
图4为本实施例中的盲区检测报警方法流程图。
具体实施方式
[0022]
如图4所示的汽车盲区检测报警方法,由控制器执行,控制器从can总线上获取本方法中所需要使用的信号,该盲区检测报警方法包括:步骤一、控制器根据车辆行驶的车速vo、方向盘转角、横摆角速度,判断车辆行驶模式,如果满足条件a~f中的任一条件,则判定车辆转弯行驶,否则判定车辆直线行驶,然后执行步骤二。其中,条件a为:横摆角速度大于0.04
°
/s;条件b为:0<vo≤18km/h,且方向盘转角大于或等于45
°
;条件c为:18 km/h <vo≤36km/h,且方向盘转角大于或等于25
°
;条件d为:36 km/h <vo≤72km/h,且方向盘转角大于或等于15
°
;条件e为:72 km/h <vo≤100km/h,且方向盘转角大于或等于10
°
;条件f为:vo>100 km/h,且方向盘转角大于或等于8
°
。
[0023]
步骤二、控制器根据车辆行驶模式和车辆行驶的车速vo,确定报警区域,如果车辆直线行驶,则确定所述报警区域为检测区域内由a、b、e、d、c点依次连接围成的五边形区域;如果车辆转弯行驶,则确定所述报警区域为检测区域内由a、b、c'、e'、d'点依次连接围成的五边形区域(参见图1),然后执行步骤三。其中,a点到车辆后视镜的横向距离为0、纵向距离为0,b点到a点的横向距离为3.5m、纵向距离为0,直线段ab的宽度为3.5m,c点到a点的横向距离为0,c点到车尾的纵向距离为1m,d点到a点的横向距离为0.5m,d点到车尾的纵向距离为y,e点到a点的横向距离为3.5m,e点到车尾的纵向距离为y,直线段de的宽度为3m,c'点到a点的横向距离为3.5m,c'点到车尾的纵向距离为1m,d'点到a点的横向距离为0,d'点到车尾的纵向距离为y,e'点到a点的横向距离为3m,e'点到车尾的纵向距离为y,直线段d'e'的
宽度为3m,y随vo动态变化,具体变化方式(参见图2)为:当0<vo≤15km/h时,y=4m;当15 km/h <vo≤36km/h时,y=(vo+13)
÷
7;当36 km/h <vo≤72km/h时,y=vo
÷
18+5;当vo>72km/h时,y=9m。
[0024]
步骤三、控制器判断是否有目标进入报警区域,如果是,则执行步骤四,否则结束。
[0025]
步骤四、控制器判断是否目标没有发生变化(即目标id没有跳变),且目标在检测区域内报警区域外持续跟踪车辆的时间超过300ms,如果是,则表示目标有历史跟踪轨迹,执行步骤六,否则(表示目标没有历史跟踪轨迹)执行步骤五。
[0026]
步骤五、控制器判断是否目标在报警区域内的横向(即x方向)速度分量vx>0.2 m/s,且纵向(即y方向)速度分量vy>1.0m/s(参见图3),且持续存在时间tr>5
÷
vo,如果是,则表示满足二次筛选条件,执行步骤六,否则(表不满足二次筛选条件)返回执行步骤三。
[0027]
步骤六、控制器判断目标在报警区域持续时间是否超过200ms,如果是,则进行目标报警,然后结束,否则返回执行步骤三。
[0028]
二次筛选条件主要针对从车头进入、从车侧横向切入盲区的目标,而对于从后方有一定的历史跟踪轨迹,确认是正常行驶目标,超越正在行驶的本车时,若正常行驶目标在报警区域持续时间超过200ms,则正常进行目标报警。当毫米波雷达在判定护栏成功,对于毫米波雷达检测到距离车辆车身侧面横向距离大于2.5m,小于4.0m的护栏,处于检测到护栏的运行模式,即距离护栏仍有一定距离,行驶中车辆位于中间车道可正常被大型车辆超越或被超越,此时大型车辆有一定的历史跟踪轨迹,进入报警区域后正常进行目标报警,避免了筛除掉正常目标带来的漏报警。靠近护栏车道,即检测到距离车辆车身侧面横向距离小于2.5m,其他车辆(比如两轮车等)仍可以正常超越或被超越的情况,同样是按照前述方法进行判断,避免个别不规则强反射物体的干扰。
[0029]
另外,本实施例还提供一种汽车盲区检测报警系统,包括毫米波雷达和与毫米波雷达连接的控制器,控制器被编程以执行前述汽车盲区检测报警方法。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签:

 热门咨询
热门咨询




tips