
 商标分类
商标分类  商标转让
商标转让 
电动汽车的制作方法
 2021-02-03 13:02:09|
2021-02-03 13:02:09| 271|
271| 起点商标网
起点商标网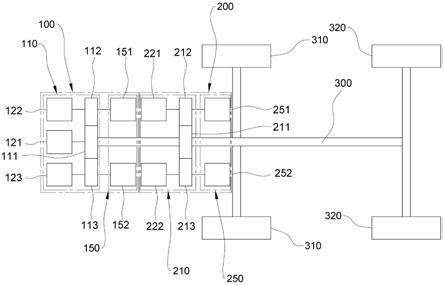
[0001]
本实用新型涉及一种电动汽车,更详细地涉及一种电动汽车,其随着与电池连接的马达的驱动实现车辆的变速,通过在电源供给部产生的电源可长时间行驶。
背景技术:
[0002]
通常,电动汽车是能够解决未来汽车公害及能源问题的最可行的方案,就这一点而言研究正在积极进行。
[0003]
电动汽车(electric vehicle;ev)主要是利用电池的电源驱动ac或dc马达获得动力的汽车,大致分为电池专用电动汽车(fully ev,plug-in ev)和混合动力电动汽车(hybrid vechicle),电池专用电动汽车利用电池的电源驱动马达,电源全部消耗完后再充电,混合动力电动汽车运转发动机并发电,给电池充电并利用该电力驱动电动马达使车移动。
[0004]
此外,混合动力电动汽车可以分为串联方式和并联方式,串联方式是将从发动机输出的机械能通过发电机转换成电能,并将此电能供给至电池或发动机,从而车辆作为总是以马达驱动的汽车,为了增加行驶距离而在以往的电动汽车上增设发动机和发电机。
[0005]
另外,并联方式通过电池电源也可使汽车移动,而且使用仅通过发动机(汽油或柴油)驱动车辆的两种动力源,根据行驶条件,并联方式可以由发动机和马达同时驱动车辆。
[0006]
此外,最近马达/控制技术逐渐发达,开发出了高输出、小型、效率高的系统。随着将dc马达转变为ac马达,功率和电动汽车的动力性能(加速性能、最高速度)大大提高,从而达到了比汽油车毫不逊色的水平。随着推进高输出化、高旋转,发动机将实现轻量小型化,从而搭载重量或容积也将大幅减少。
[0007]
另外,在现有的汽车中也使用小型电池,在启动电场内部的负荷或发动时使用小型电池的能量。在电动汽车中,使用用于车辆操作的高压电池及用于启动电场内部的负荷的辅助电池的能量。
[0008]
在此,如果熄火并成为非驾驶状态,在辅助电池可能通过电场内部负荷产生泄漏电流,如果持续的电流泄漏,则会产生辅助电池放电或降为低电压的现象。此外,如果达到了辅助电池的放电终止电压,辅助电池将不再使用,从而对辅助电池的寿命也产生影响。
[0009]
汽车在受到高速行驶或低速行驶或停车移动等多种外部环境的支配时不得不行驶,而驾驶员则积极地应对多种外部环境并控制汽车,从而得以不发生任何事故地安全行驶。
[0010]
但是,如果汽车的安全行驶与否完全取决于司机个人的驾驶能力和状况应对能力,则必然会限制驾驶不熟练者对被视为生活必需品的汽车的接近。
[0011]
因此,以发电的电子及控制技术为基础的多种车辆控制技术适用于汽车,以便无需驾驶员积极应对也能确保安全行驶,从而提高驾驶技术不熟练者对汽车的接近性,尤其同时提高驾驶熟练者的控制便利性。
[0012]
一般,适用如上所述的多种车辆控制技术的汽车称为智能汽车。
[0013]
适用于智能汽车的汽车控制技术,可包括例如,智能行驶控制(ascc;advancedsmart cruse control)、紧急制动控制(aebs;auto emergence braking system)、陡坡起步辅助(hsa;hill start assist)、陡坡缓降控制(hill decent control)、停车转向控制(spas;smart parking assist system)及停车辅助控制(pas;parking assistsystem)。
[0014]
所述智能行驶控制(ascc)是在行驶时无需驾驶员的踏板操作而自动维持行驶速度的同时,与先行车辆保持车间距,从而确保安全的功能。
[0015]
所述紧急制动控制(aebs)是驾驶时即使没有驾驶员的操作也能安全地确保与先行车辆形成的车间距的功能。
[0016]
所述陡坡起步辅助(hsa)是在上坡路停止后出发时,通过防止下滑确保安全的功能,而所述陡坡缓降控制(hdc)是在崎岖的坡路上使下坡路行驶平稳,从而确保安全的功能。
[0017]
所述停车转向控制(spas)是在停车时即使没有变速杆的位移变速也便利的后方停车功能,所述停车辅助控制(pas)是迅速地应对突发障碍物的出现的后方停车功能。
[0018]
以下,将所述智能行驶控制(ascc)称为ascc,所述紧急制动控制(aebs)称为aebs,所述陡坡起步辅助(hsa)称为has,所述陡坡缓降控制(hdc)称为hdc,所述停车转向控制(spas)称为spas,所述停车辅助控制(pas)称为pas。
[0019]
但是,类似ascc和aebs、has、hdc、spas及pas的智能功能为了适用于实车应该特别化,以便与汽车行驶相关电子设备协同控制,而这些方面大大限制了作为环保车辆现在着重凸显的电动汽车的实车适用性。
[0020]
其中最大的原因是电动汽车与内燃机型汽车不同,没有变速器(transmission)。
[0021]
例如,如果为改变行驶速度而操作变速杆,内燃机型汽车变速杆的操作则带来变速器的齿轮端变换,相反电动汽车则带来发动机转矩变换而不是齿轮端变换。
[0022]
据此,为了将电动汽车开发为智能电动汽车及实现商品化,应该以使得ascc和 aebs、has、hdc、spas及pas等与作为动力源的马达连接的形式特别化,尤其将马达的转矩控制与智能功能匹配,从而要求能最优化的技术的开发。
[0023]
例如,下面专利文件1中公开了“电动汽车及其的辅助电池充电方法”。
[0024]
根据下面专利文件1的电动汽车,作为一种具备产生驱动能的高压电池的电动汽车,包括:辅助电池,其向设置于所述电动汽车的电气部件供给电力;第一电池控制部 (bmu:battery management unit),其管理所述高压电池的状态;电压调整部,其利用所述高压电池给所述辅助电池充电;第二电池控制部(bmu:battery managementunit),其管理所述辅助电池的状态;继电器,其通过电气信号与所述第二电池控制部相互连动,控制向所述电气部件供给的电流;终端机,其利用设置于所述第二电池控制部的通信媒介,实时接收所述高压电池及辅助电池的各种情况的供给。
[0025]
下面专利文件2中公开了“智能电动汽车及其运用方法”。
[0026]
根据下面专利文件2的智能电动汽车,包括:利用电池电力产生动力的马达;控制所述马达的马达控制单元(mcu;motor control unit);进行车辆制动的反锁死煞车系统(abs;anti brake system);进行车辆转向的电动转向装置(mdps;motor drivenpower steering);向驾驶员展示车辆的状态的人机界面(hmi,human machineinterface);相互通信的can网络;变更车辆的变速端的变速杆;用于车辆加速的加速踏板;用于车辆制动的
刹车踏板;智能控制单元(scu;smart control unit),其具备lin网络,进行智能行驶控制(advanced smart cruse control),lin网络与所述can 网络相互通信,处理ascc按钮的操作信号和前后方传感器的先行车辆检测信号,通过利用所述can网络的相互通信,行驶时即使没有驾驶员的操作也能确保行驶安全;整车控制单元(vcu;vehicle control unit),通过can网络相互通信,在执行所述智能行驶控制时,在为了维持与先行车辆形成的车间距的减速中,无需驾驶员的操作也可以根据所述电池电压水平实现再生制动,具有通过这种智能行驶控制模式控制马达的转矩的应用运算法则,将车辆控制在最高位水平。
[0027]
先行技术文献
[0028]
(专利文献001)韩国专利公开号第10-2013-0130217号
[0029]
(专利文献002)韩国专利公开号第10-2013-0142349号
[0030]
(专利文献003)韩国专利公开号第10-2014-0089800号
[0031]
(专利文献004)韩国专利公开号第10-2015-0056368号
技术实现要素:
[0032]
本实用新型是为了解决如上所述的问题而提出的,目的在于提供一种电动汽车,其另外设置有使车辆根据变速低速行驶的第一变速、第二变速、第三变速、第四变速的驱动马达。
[0033]
本实用新型的另一个目的在于提供一种电动汽车,变速根据车辆的行驶速度分别在不同的驱动部实现。
[0034]
为了达成如上所述的目的,根据本实用新型的电动汽车,作为具备电池的电动汽车,特征在于,包括:第一变速齿轮部,其设置为通过低速实现齿轮变速;第二变速齿轮部,其设置为通过高速实现齿轮变速;旋转轴,其通过所述第一变速齿轮部及所述第二变速齿轮部的驱动而旋转。
[0035]
特征在于,还包括:电源供给部,其设置为向所述第一变速齿轮部及所述第二变速齿轮部供给电源。
[0036]
所述第一变速齿轮部,包括:实现所述电动汽车的低速行驶的第一驱动齿轮部和实现所述电动汽车的低速行驶的第二驱动齿轮部,所述第一驱动齿轮部包括:第一齿轮,其结合于所述旋转轴;第一马达,其设置于所述第一齿轮,以便使所述第一齿轮旋转;第二齿轮,其与所述第一齿轮的一侧啮合;第二马达,其设置于所述第二齿轮,以便使所述第二齿轮旋转;第三齿轮,其与所述第一齿轮的另一侧啮合;第三马达,其设置于所述第三齿轮,以便使所述第三齿轮旋转;所述第二驱动齿轮部包括:第四马达,其设置于所述第一齿轮,以便使所述第一齿轮旋转;第五马达,其设置于所述第三齿轮,以便使所述第三齿轮旋转。
[0037]
所述第二变速齿轮部,包括:实现所述电动汽车的高速行驶的第三驱动齿轮部和实现所述电动汽车的高速行驶的第四驱动齿轮部,所述第三驱动齿轮部包括:第一齿轮,其结合于所述旋转轴;第二齿轮,其与所述第一齿轮的一侧啮合;第一马达,其设置于所述第二齿轮,以便使所述第二齿轮旋转;第三齿轮,其与所述第一齿轮的另一侧啮合;第二马达,其设置于所述第三齿轮,以便使所述第三齿轮旋转;所述第四驱动齿轮部包括:第三马达,其设置于所述第二齿轮,以便使所述第二齿轮旋转;第四马达,其设置于所述第三齿轮,以便使所述第三齿轮旋转。
[0038]
所述电源供给部,包括:第一齿轮,其设置为可借助于第一马达旋转;第二齿轮,其设置为可借助于第一马达旋转;第三齿轮,其与所述第一齿轮和第二齿轮结合;发电机,其根据所述第三齿轮旋转的同时产生电源;多个电池,其通过所述发电机产生的电源得到充电。
[0039]
如上所述,根据本实用新型的电动汽车效果在于,不仅可以借助于第一变速齿轮部的第一驱动齿轮部及第二驱动齿轮部实现低速行驶,还能借助于第二变速齿轮部的第三驱动齿轮部及第四驱动齿轮部实现高速行驶,在旋转轴增加多个变速齿轮部从而可增减行驶速度,持续地供给由电源供给部产生的电源,从而可长时间行驶。
附图说明
[0040]
图1是表示根据本实用新型的优选实施例的电动汽车的概略构成图。
[0041]
图2是表示根据本实用新型的优选的另一个实施例的电动汽车的概略构成图。
[0042]
标号说明
[0043]
100:第一变速齿轮部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
110:第一驱动齿轮部
[0044]
111:第一一号齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
112:第二一号齿轮
[0045]
113:第三一号齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
121:第一一号马达
[0046]
122:第二一号马达
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
123:第三一号马达
[0047]
150:第二驱动齿轮部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
151:第四一号马达
[0048]
152:第五一号马达
[0049]
200:第二变速齿轮部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
210:第三驱动齿轮部
[0050]
211:第一二号齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
212:第二二号齿轮
[0051]
213:第三二号齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
221:第一二号马达
[0052]
222:第二二号马达
[0053]
250:第四驱动齿轮部251:第三二号马达
[0054]
252:第四二号马达
[0055]
300:旋转轴
[0056]
400:电源供给部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
411:第一三号马达
[0057]
412:第二三号马达
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
421:第一三号齿轮
[0058]
422:第二三号齿轮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
423:第三三号齿轮
[0059]
430:发电机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
440:电池
具体实施方式
[0060]
以下,参照附图对根据本实用新型的优选实施例的电动汽车进行详细地说明。
[0061]
根据本实用新型的优选实施例的电动汽车,作为具备电池的电动汽车,包括:第一变速齿轮部100,其设置为通过低速实现齿轮变速;第二变速齿轮部200,其设置为通过高速实现齿轮变速;旋转轴300,其通过所述第一变速齿轮部100及所述第二变速齿轮部200的驱动而旋转。
[0062]
图1是表示根据本实用新型的优选实施例的电动汽车的概略构成图。
[0063]
如图1所示,根据本实用新型的实施例的电动汽车根据汽车的行驶速度实现变速,
设置有实现低速行驶的第一变速齿轮部100和实现高速行驶的第二变速齿轮部200。
[0064]
第一变速齿轮部100包括实现所述电动汽车的低速行驶的第一驱动齿轮部110和实现所述电动汽车的低速行驶的第二驱动齿轮部150。
[0065]
所述第一驱动齿轮部110包括:第一一号齿轮111,其结合于所述旋转轴300;第一一号马达121,其设置于所述第一一号齿轮111,以便使所述第一一号齿轮111旋转;第二一号齿轮112,其与所述第一一号齿轮111的一侧啮合;第二一号马达122,其设置于所述第二一号齿轮112,以便使所述第二一号齿轮112旋转;第三一号齿轮113,其与所述第一一号齿轮111的另一侧啮合;第三一号马达123,其设置于所述第三一号齿轮113,以便使所述第三一号齿轮113旋转。
[0066]
所述第二驱动齿轮部150包括:第四一号马达151,其设置于所述第一一号齿轮111,以便使所述第一一号齿轮111旋转;第五一号马达152,其设置于所述第三一号齿轮113,以便使所述第三一号齿轮113旋转。
[0067]
所述第一驱动齿轮部110和第二驱动齿轮部150在低速行驶时驱动,所述第一驱动齿轮部110属于齿轮变速最低段的1段变速,所述第二驱动齿轮部150能够以比第一驱动齿轮部110更快的速度行驶,属于2段变速。
[0068]
所述第一齿轮111结合于旋转轴300,所述第一一号齿轮111使旋转轴300得以旋转。
[0069]
在所述第一一号齿轮111的一侧结合有使所述第一一号齿轮111旋转的第二一号齿轮112,在所述第一一号齿轮111的另一侧结合有使所述第一一号齿轮111旋转的第三一号齿轮113。
[0070]
在所述第一号一齿轮111设置有第一一号马达121,在所述第二一号齿轮112设置有第二一号马达122,在所述第三一号齿轮113设置有第三一号马达123。
[0071]
这些第一至第三一号马达121、122、123分别使得第一一号齿轮111、第二一号齿轮112、第三一号齿轮113旋转,通过这些一号马达121、122、123驱动的一号齿轮111、 112、113旋转的同时使得旋转轴300旋转。
[0072]
所述第一一号马达121、第二一号马达122及第三一号马达123是为了能获得大的动力,随着三个一号马达121、122、123被驱动得以获得转矩。这是为了能顺利地实现倾斜路等的行驶。
[0073]
所述第二驱动齿轮部150包括使第二一号齿轮112旋转的第四一号马达151和使所述第三一号齿轮113旋转的第五一号马达152。
[0074]
所述第二驱动齿轮部150要求比所述第一驱动齿轮部110更大的旋转速度,因此以更快的旋转速度旋转。
[0075]
据此,所述第二驱动齿轮部150可通过比所述第一驱动齿轮部110更快的速度行驶。
[0076]
所述第二变速齿轮部200包括实现所述电动汽车的高速行驶的第三驱动齿轮部210 和实现所述电动汽车的高速行驶的第四驱动齿轮部250。
[0077]
所述第三驱动齿轮部210包括:第一二号齿轮211,其结合于所述旋转轴;第二二号齿轮212,其与所述第一二号齿轮211的一侧啮合;第一二号马达221,其设置于所述第二二号齿轮212,以便使所述第二二号齿轮212旋转;第三二号齿轮213,其与所述第一二号齿轮
211的另一侧啮合;第二二号马达222,其设置于所述第三二号齿轮213,以便使所述第三二号齿轮213旋转。
[0078]
所述第四驱动齿轮部250包括:第三二号马达251,其设置于所述第二二号齿轮212,以便使所述第二二号齿轮212旋转;第四二号马达252,其设置于所述第三二号齿轮213,以便使所述第三二号齿轮213旋转。
[0079]
所述第二变速齿轮部200是为了能以比第一变速齿轮部100更快的速度行驶,包括以比第二驱动齿轮部150更快速度旋转的第三驱动齿轮部210及以比第三驱动齿轮部 210更快速度旋转的第四驱动齿轮部250。
[0080]
所述第三驱动齿轮部210包括:第一二号齿轮211,其结合于旋转轴300;第二二号齿轮212,其设置于所述第一二号齿轮211的一侧;第三二号齿轮213,其设置于所述第一二号齿轮211的另一侧;第一二号马达221,其设置于第二二号齿轮212的一侧;第二二号马达222,其设置于所述第三二号齿轮213的一侧。
[0081]
并且,所述第四驱动齿轮部250包括:第三二号马达251,其设置于第二二号齿轮212的另一侧;第四二号马达252,其设置于第三二号齿轮213的另一侧。
[0082]
图2是表示根据本实用新型的优选的另一个实施例的电动汽车的概略构成图。
[0083]
如图2所示,根据本实用新型的另一实施例的电动汽车,包括:形成有第一驱动齿轮部110和第二驱动齿轮部150的第一变速齿轮部100;及形成有第三驱动齿轮部210 和第四驱动齿轮部250的第二变速齿轮部200。
[0084]
所述第一变速齿轮部100设置于旋转轴300的前方,第二变速齿轮部200与第一变速齿轮部100隔开地设置于旋转轴300。
[0085]
所述第一变速齿轮部100及第二变速齿轮部200与上述的实施例相同,因此省略其重复的说明。
[0086]
另外,所述电源供给部400包括:第一三号齿轮421,其设置为可借助于第一三号马达411旋转;第二三号齿轮422,其设置为可借助于第一三号马达411旋转;第三三号齿轮423,其与所述第一三号齿轮421和所述第二三号齿轮422结合;发电机430,其根据所述第三三号齿轮423旋转的同时产生电源;多个电池440,其通过所述发电机 430产生的电源得到充电。
[0087]
在所述第一三号马达411连接设置有第一三号齿轮421,在所述第二三号马达412 连接设置有第二三号齿轮422,第三三号齿轮423互相结合于所述第一三号齿轮421和第二三号齿轮422之间。
[0088]
在这样的第三三号齿轮423设置有产生电源的发电机430和利用所述发电机430产生的电源进行充电的多个电池440。
[0089]
所述第三三号齿轮423通过所述第一三号齿轮421或第二三号齿轮422旋转的同时驱动发电机430,所述发电机430产生的电源给电池440充电,所述已充电的电源供给至第一变速齿轮部100及第二变速齿轮部200。
[0090]
下面参照图1及图2对根据本实用新型的优选实施例的电动汽车的运转方法进行说明。
[0091]
如图1及图2所示,所述第一变速齿轮部100以实现低速行驶的形式驱动,所述第一驱动齿轮部110通过接入的电源驱动。
[0092]
所述第一一号马达121、第二一号马达122及第三一号马达123通过接入的电源驱动,并驱动第一一号齿轮111、第二一号齿轮112及第三一号齿轮113,使得结合于所述第一一号齿轮111的旋转轴300旋转。
[0093]
所述旋转轴300使得前轮310及后轮320旋转,从而实现行驶。
[0094]
另外,随着电动汽车的速度增加,驱动第二驱动齿轮150,驱动第四一号马达151 和第五一号马达152,从而使得第二一号齿轮112和第三一号齿轮113旋转。
[0095]
第一一号齿轮111借助于所述第二一号齿轮112和第三一号齿轮113旋转,从而驱动旋转轴300。这样的第二驱动齿轮部150实现以比第一驱动齿轮部110更快的速度行驶。
[0096]
所述第二变速齿轮部200的第三驱动齿轮部210通过第一二号马达221使得第二二号齿轮212旋转,通过第二二号马达222使得第三二号齿轮213旋转。
[0097]
因此,设置于所述第二二号齿轮212和第三二号齿轮213之间的第一二号齿轮211 旋转的同时,使得旋转轴300旋转并驱动。这样的第三驱动齿轮部210以比第二驱动齿轮部150更快的速度旋转,从而实现以比第二驱动齿轮部150更快的速度行驶。
[0098]
并且,第四驱动齿轮部250的第三二号马达251和第四二号马达252通过接入的电源驱动第二二号齿轮212和第三二号齿轮213,从而使得第一二号齿轮211旋转并驱动旋转轴300。
[0099]
这样的第三驱动齿轮部210以比第二驱动齿轮部150更快的速度旋转,第四驱动齿轮部250以比第三驱动齿轮部210更快的速度旋转。
[0100]
另外,在所述旋转轴300不仅设置有第一变速齿轮部100及第二变速齿轮部200,还设置有第三变速齿轮部(未示出)及第四变速齿轮部(未示出),从而当然可以通过更快的速度行驶。
[0101]
以上根据实施例对由本发明人实现的实用新型进行了具体的说明,但本实用新型不限定于上述实施例,当然在不脱离其要旨的范围内可进行多种变更。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips