
 商标分类
商标分类  商标转让
商标转让 
水田装备自适应动力分配系统及方法与流程
 2021-02-03 13:02:15|
2021-02-03 13:02:15| 542|
542| 起点商标网
起点商标网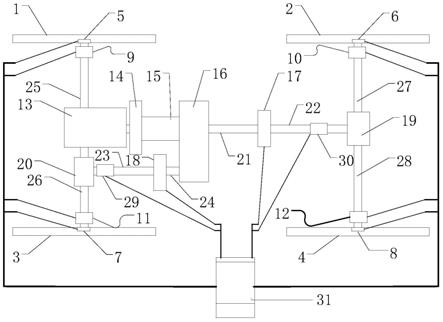
[0001]
本发明涉及农用机械技术领域,具体地指一种水田装备自适应动力分配系统及方法。
背景技术:
[0002]
水田环境属于泥水混合环境,行驶环境复杂,水田动力装备在作业行走过程中容易出现沉陷和打滑的情况。现有的大部分水田动力装备四轮驱动底盘通过分动箱进行前后桥的动力分配,由于普通分动箱属于硬连接结构,四轮驱动时前后桥动力分配比为1:1,很难适应水田复杂的行走工况,而汽车工业中精密复杂的动力分配系统无法适应水田恶劣的泥水工况,且价格昂贵。
技术实现要素:
[0003]
本发明的目的就是要提供一种水田装备自适应动力分配系统及方法,本发明能在底盘出现单轮打滑或多轮打滑时,实现对底盘驱动轮动力的智能分配,增强底盘在水田环境中的行走能力,降低水田动力装备的油耗。
[0004]
为实现此目的,本发明所设计的水田装备自适应动力分配系统,它包括发动机、离合器、减速器、分动箱、前桥驱动轴、后桥驱动轴、前轴差速器和后轴差速器,其特征在于:它还包括前电控摩擦片式离合器、后电控摩擦片式离合器、车轮电控刹车器、车轮转速传感器、前驱动轴扭矩传感器、后驱动轴扭矩传感器和中央控制单元,其中,发动机产生的动力能通过离合器传递至减速器的输入端,减速器的输出端用于将动力传递到分动箱,分动箱的前动力输出轴和后动力输出轴分别通过前电控摩擦片式离合器和后电控摩擦片式离合器将动力传递到前桥驱动轴和后桥驱动轴,前桥驱动轴和后桥驱动轴分别与前轴差速器和后轴差速器连接,前轴差速器用于通过左前轮传动轴和右前轮传动轴将动力分别传递到左前轮和右前轮,后轴差速器用于通过左后轮传动轴和右后轮传动轴,将动力分别传递到左后轮和右后轮,所述车轮转速传感器用于检测各个车轮的转速,前驱动轴扭矩传感器和后驱动轴扭矩传感器用于检测前后桥驱动轴的扭矩,中央控制单元用于根据各个车轮的转速和前后桥驱动轴的扭矩判断当前行进状态是否出现车轮打滑,并根据是否出现车轮打滑的判断结果控制前电控摩擦片式离合器、后电控摩擦片式离合器、四个轮子的车轮电控刹车器的工作状态实现对各个车轮输出扭矩的控制。
[0005]
本发明的底盘传动系统机械结构包发动机、离合器、减速器、前桥、后桥、分动箱、差速器、车轮组成。将发动机的动力通过离合器和减速器传动到分动箱,分动箱可将动力分配给前后驱动轴,在前桥驱动轴和后桥驱动轴上分别加装了行程可控的电控摩擦片式离合器,控制前驱动轴和后驱动轴的动力传递,分别在四个车轮上加装一个电控刹车器,其作用是车轮在空转造成打滑时给其一定的制动力来阻止车轮空转而出现的打滑情况,提升底盘在复杂水田环境中的牵引力,保证底盘正常行走。
[0006]
本发明的有益效果:
[0007]
本发明将传动轴扭矩和四个车轮速度检测数据进行分析对比,得出行走工况状态;动力控制输出器根据微处理器数据融合计算结果和智能决策方案,对驱动轴和车轮的输出动力进行调整,输出动力控制信号;控制执行单元由车轮电控刹车器和驱动轴电控离合器组成,接收动力输出控制器的控制信号,通过车轮上的电控刹车片控制车轮的转速,调整车轮的扭矩,通过前后传动轴上的电控摩擦式离合器来控制前后动力扭矩的输出比例。通过底盘行走过程中,车轮和驱动轴传感器上采集的工况信息,通过多传感器融合计算,判断底盘所处的当前状态,自动控制前后驱动轴和车轮的扭矩和转速,从而达到优化动力分配,提高底盘牵引力的效果。
附图说明
[0008]
图1为本发明的结构示意图;
[0009]
图2为本发明的底盘自适应动力分配控制系统运行流程图;
[0010]
图3为单轮打滑状态下各车轮转速变化图;
[0011]
图4为单轮打滑状态下前驱动轴与后驱动轴扭矩变化图;
[0012]
图5为双轮同时打滑状态下各车轮转速变化图;
[0013]
图6为双轮同时打滑状态下前驱动轴与后驱动轴扭矩变化图。
[0014]
图3中v1为正常行驶时四车轮转速值、v2打滑时左前轮转速值、v3左前轮打滑时其他三轮的转速值(单轮打滑后,牵引力下降,整体车速降低)、t1正常行驶到车轮打滑过渡时间起点和t2正常行驶到车轮打滑过渡时间终点;
[0015]
图4中n1为正常行驶时的前、后驱动轴扭矩值、n2打滑时前驱动轴扭矩值、n3打滑时后驱动轴扭矩值、t1正常行驶到车轮打滑过渡时间起点和t2正常行驶到车轮打滑过渡时间终点;
[0016]
图5中v1为正常行驶时四车轮转速值、v4打滑时左、右前轮转速值、v5打滑时左、右后轮转速值、t1正常行驶到车轮打滑过渡时间起点和t2正常行驶到车轮打滑过渡时间终点;
[0017]
图6中n1为正常行驶时的前后、驱动轴扭矩值、n4打滑时前驱动轴扭矩值、n5打滑时后驱动轴扭矩值、t1正常行驶到车轮打滑过渡时间起点和t2正常行驶到车轮打滑过渡时间终点;
[0018]
其中,1—右前车轮、2—右后车轮、3—左前车轮、4—左后车轮、5—右前车轮电控刹车器、6—右后车轮电控刹车器、7—左前车轮电控刹车器、8—左后车轮电控刹车器、9—右前车轮转速传感器、10—右后车轮转速传感器、11—左前车轮转速传感器、12—左后车轮转速传感器、13—发动机、14—离合器、15—减速器、16—分动箱、17—后电控摩擦片式离合器、18—电控摩擦片式离合器、19—后轴差速器、20—前轴差速器、21—后动力输出轴、22—后桥驱动轴、23—前桥驱动轴、24—前动力输出轴、25—右前轮传动轴、26—左前轮传动轴、27—右后轮传动轴、28—左后轮传动轴、29—前驱动轴扭矩传感器、30—后驱动轴扭矩传感器、31—中央控制单元。
具体实施方式
[0019]
以下结合附图和具体实施例对本发明作进一步的详细说明:
[0020]
本发明所设计的一种水田装备自适应动力分配系统,如图1所示,它包括发动机13、离合器14、减速器15、分动箱16、前桥驱动轴23、后桥驱动轴22、前轴差速器20和后轴差速器19、电控摩擦片式离合器18、后电控摩擦片式离合器17、车轮电控刹车器、车轮转速传感器、前驱动轴扭矩传感器29、后驱动轴扭矩传感器30和中央控制单元31,其中,发动机13产生的动力能通过离合器14传递至减速器15的输入端,减速器15的输出端用于将动力传递到分动箱16,分动箱16的前动力输出轴24和后动力输出轴21分别通过前电控摩擦片式离合器18和后电控摩擦片式离合器17将动力传递到前桥驱动轴23和后桥驱动轴22,前桥驱动轴23和后桥驱动轴22分别与前轴差速器20和后轴差速器19连接,前轴差速器20用于通过左前轮传动轴26和右前轮传动轴25将动力分别传递到左前轮3和右前轮1,后轴差速器19用于通过左后轮传动轴28和右后轮传动轴27将动力分别传递到左后轮4和右后轮2,所述车轮转速传感器用于检测各个车轮的转速,前驱动轴扭矩传感器29和后驱动轴扭矩传感器30用于检测前后桥驱动轴的扭矩,中央控制单元31用于根据各个车轮的转速和前后桥驱动轴的扭矩判断当前行进状态是否出现车轮打滑,并根据是否出现车轮打滑的判断结果控制前电控摩擦片式离合器18、后电控摩擦片式离合器17、四个轮子(右前车轮1、右后车轮2、左前车轮3和左后车轮4)的车轮电控刹车器的工作状态实现对各个车轮输出扭矩的控制。
[0021]
上述技术方案中,中央控制单元31用于根据各个车轮的转速和前后桥驱动轴的扭矩判断当前行进状态是否出现车轮打滑的方法为:
[0022]
进行多传感器信息融合计算,驱动轴扭矩参数异常判断函数为:
[0023][0024]
其中,t1为前桥驱动轴扭矩,t2为后桥驱动轴扭矩,zx为驱动轴扭矩参数异常判断预设系数,zx取值为0~1之间(zx,设置为0.8,即前后驱动轴的扭矩差异,达到总扭矩的80%时,即f(t1,t2)大于1时,判定驱动轴参数异常判断函数异常,正常情况两轴的扭矩是1:1,扭矩差为0,异常情况扭矩差出现较大差异,当扭矩差绝对值达到总扭矩的80%时,判断低扭矩轴上的车轮出现严重打滑,导致该扭矩轴参数异常),当驱动轴扭矩参数异常判断函数f(t1,t2)的数值大于1时,判断为驱动轴扭矩参数异常,此时判定前桥驱动轴和后桥驱动轴中扭矩小的驱动轴出现参数异常;
[0025]
车轮转速异常判断函数为:
[0026]
f(v1,v2)=v
1-v2/z(tv1+v2)
[0027]
其中,v1为左轮转速,v2为右轮转速,zt为车轮转速异常判断预设系数,zt取值为0~1之间,当车轮转速异常判断函数f(v1,v2)数值大于1时,判断车轮转速参数异常,此时判定左轮和右轮中转速高的车轮转速参数异常;
[0028]
当驱动轴扭矩参数异常时,前桥驱动轴和后桥驱动轴中低扭矩驱动轴上的车轮转速参数正常,表示前桥驱动轴和后桥驱动轴中低扭矩驱动轴上的左轮和右轮都出现打滑;
[0029]
当驱动轴扭矩参数异常时,前桥驱动轴和后桥驱动轴中低扭矩驱动轴上车轮转速参数异常,表示低扭矩驱动轴上的左轮和右轮中高转速的车轮单轮出现打滑;
[0030]
当驱动轴扭矩参数正常时,若前桥驱动轴上的车轮转速参数异常,则表示前桥驱动轴上左轮和右轮中高转速的车轮单轮出现打滑,若后桥驱动轴上的车轮转速参数异常,则表示后桥驱动轴上左轮和右轮中高转速的车轮单轮出现打滑。
[0031]
上述技术方案中,所述中央控制单元31根据是否出现车轮打滑的判断结果控制前电控摩擦片式离合器18、后电控摩擦片式离合器17、四个轮子的车轮电控刹车器的工作状态实现对前后驱动轴和各个车轮输出扭矩的控制,具体控制方法:判断是单轮打滑还是左右两轮同时打滑;
[0032]
若单轮打滑,直接控制打滑轮的电控刹车器,无需控制前后轴的电控摩擦片式离合器,降低打滑轮转速,通过与打滑轮连接的差速器的传递作用(前左右轮和后左右轮中间各有一个差速器。若左前轮打滑,会通过前差速器传递作用,使用右前轮的转速和扭矩提高,若左后轮打滑,会通过后差速器传递作用,使右后轮转速和扭矩提高),对称的非打滑轮的转速和扭矩提高,如果是左前轮打滑,对称的非打滑轮为右前轮;如果是右后轮打滑,对称的非打滑轮为左后轮,对称指的是左右对称,此时,如果是前轮打滑,控制之后,前桥驱动轴23的扭矩增加,如果后轮打滑,控制之后,后桥驱动轴22的扭矩增加,使得驱动轴扭矩参数异常判断函数f(t1,t2)的数值回归正常值(通过车轮的电控刹车器降低打滑车轮转速,在差速器的作用下,对称非打滑轮的转速会自动提高,直到左右两轮的转速达到一致),底盘的牵引力增加(单轮打滑时,由于差速器的存在,一个轮子高速转动,一个轮子基本不动,两轮总转速是恒定的,降低高速轮的转速,低速轮才能转起来产生牵引力);
[0033]
若是前桥驱动轴23连接的左右双轮打滑或后桥驱动轴22连接的左右双轮打滑(两个轮子都失去牵引力,此时不可能对左右双轮同时启动电控刹车器,否则直接底盘刹停了),控制前电控摩擦片式离合器18或后电控摩擦片式离合器17的离合程度,使打滑轮连接的驱动轴的电控摩擦片式离合器的结合程度降低,降低打滑轮连接的驱动轴的扭矩输出,此时打滑的双轮转速降低,直到四轮转速一致,此时系统会逐步回复离合器的闭合状态,直到完全闭合,开始下一个周期的闭环控制。
[0034]
上述技术方案中,所述中央控制单元31对各个车轮输出扭矩控制后,调整后的各个车轮的转速和前后桥驱动轴的扭矩再次进行当前行进状态是否出现车轮打滑的判断,形成闭环控制。
[0035]
上述技术方案中,所述中央控制单元31用于将车轮转速信息以及前桥驱动轴和后桥驱动轴的扭矩分配信息在中控显示屏上显示。
[0036]
上述技术方案中,所述四个轮子的车轮电控刹车器分别为右前车轮电控刹车器5、右后车轮电控刹车器6、左前车轮电控刹车器7、左后车轮电控刹车器8,中央控制单元31的摩擦片式离合器控制信号输出端分别连接前电控摩擦片式离合器18和后电控摩擦片式离合器17的控制信号输入端,中央控制单元31的车轮电控刹车控制信号输出端分别连接右前车轮电控刹车器5、右后车轮电控刹车器6、左前车轮电控刹车器7和左后车轮电控刹车器8的控制信号输入端。
[0037]
上述技术方案中,所述车轮转速传感器包括右前车轮转速传感器9、右后车轮转速传感器10、左前车轮转速传感器11和左后车轮转速传感器12,所述右前车轮转速传感器9、右后车轮转速传感器10、左前车轮转速传感器11和左后车轮转速传感器12的车辆转速信号输出端连接中央控制单元31的转速信号输入端;
[0038]
所述前驱动轴扭矩传感器29和后驱动轴扭矩传感器30的扭矩信号输出端连接中央控制单元31的扭矩信号输入端。
[0039]
一种根据上述所述系统的水田装备自适应动力分配方法,如图2所述,它包括如下
步骤:
[0040]
步骤1:车轮转速传感器检测各个车轮的转速,前驱动轴扭矩传感器29和后驱动轴扭矩传感器30检测前后桥驱动轴的扭矩;
[0041]
步骤2:中央控制单元31根据各个车轮的转速和前后桥驱动轴的扭矩判断当前行进状态是否出现车轮打滑,具体判断方式为;
[0042]
进行多传感器信息融合计算,驱动轴扭矩参数异常判断函数为:
[0043][0044]
其中,t1为前桥驱动轴扭矩,t2为后桥驱动轴扭矩,zx为驱动轴扭矩参数异常判断预设系数,zx取值为0~1之间,当驱动轴扭矩参数异常判断函数f(t1,t2)的数值大于1时,判断为驱动轴扭矩参数异常,此时判定前桥驱动轴和后桥驱动轴中扭矩小的驱动轴出现参数异常;
[0045]
车轮转速异常判断函数为:
[0046][0047]
其中,v1为左轮转速,v2为右轮转速,zt为车轮转速异常判断预设系数,zt取值为0~1之间,当车轮转速异常判断函数f(v1,v2)数值大于1时,判断车轮转速参数异常,此时判定左轮和右轮中转速高的车轮转速参数异常;
[0048]
当驱动轴扭矩参数异常时,前桥驱动轴和后桥驱动轴中低扭矩驱动轴上的车轮转速参数正常,表示前桥驱动轴和后桥驱动轴中低扭矩驱动轴上的左轮和右轮都出现打滑;
[0049]
当驱动轴扭矩参数异常时,前桥驱动轴和后桥驱动轴中低扭矩驱动轴上车轮转速参数异常,表示低扭矩驱动轴上的左轮和右轮中高转速的车轮单轮出现打滑;
[0050]
当驱动轴扭矩参数正常时,若前桥驱动轴上的车轮转速参数异常,则表示前桥驱动轴上左轮和右轮中高转速的车轮单轮出现打滑,若后桥驱动轴上的车轮转速参数异常,则表示后桥驱动轴上左轮和右轮中高转速的车轮单轮出现打滑;
[0051]
步骤3:根据是否出现车轮打滑的判断结果控制前电控摩擦片式离合器18、后电控摩擦片式离合器17、四个轮子的车轮电控刹车器的工作状态实现对各个车轮输出扭矩的控制。
[0052]
具体控制方法:判断是单轮打滑还是左右两轮同时打滑;
[0053]
若单轮打滑,直接控制打滑轮的电控刹车器,降低打滑轮转速,通过与打滑轮连接的差速器的传递作用,对称的非打滑轮的转速和扭矩提高,如果是左前轮打滑,对称的非打滑轮为右前轮;如果是右后轮打滑,对称的非打滑轮为左后轮。对称指的是左右对称,此时,如果是前轮打滑,控制之后,前桥驱动轴23的扭矩增加,如果后轮打滑,控制之后,后桥驱动轴22的扭矩增加,使得驱动轴扭矩参数异常判断函数f(t1,t2)的数值回归正常值,底盘的牵引力增加;
[0054]
若是前桥驱动轴23连接的左右双轮打滑或后桥驱动轴22连接的左右双轮打滑,控制前电控摩擦片式离合器18或后电控摩擦片式离合器17的离合程度,使打滑轮连接的驱动轴的电控摩擦片式离合器的结合程度降低,降低打滑轮连接的驱动轴的扭矩输出,此时打滑的双轮转速降低,直到四轮转速一致。
[0055]
具体实施例:
[0056]
(1)硬质路面行走
[0057]
在硬质路面行走时,不存在打滑情况,采用两轮驱动模式,断开后桥传动轴电控摩擦式离合器17或者断开前桥传动轴电控摩擦式离合器18,水田动力装备底盘只依靠前轮或者后轮驱动。
[0058]
(2)水田环境行走
[0059]
在水田环境行走时,由于环境的复杂性,启用四轮驱动模式,同时闭合前、后桥传动轴电控摩擦式离合器,底盘动力分配控制系统被启动。
[0060]
1)单轮打滑状态下实施例(以左前轮3打滑为例):
[0061]
当底盘在水田环境中行进作业,左前轮打滑时,左前轮3转速快速上升,右前轮1的转速快速下降,底盘整体牵引力下降,整体行进速度下降。整体其余各传感器的关键参数的变化状态如图3和图4所示。
[0062]
第一步、信息采集。底盘四个轮子的转速传感器和驱动轴上的扭矩传感器采集的信号信息如图4所示。
[0063]
第二步、多传感器信息融合计算。采集器将第一步中的各路信号采集后,传入微控制处理器,进行多传感器信息融合计算。
[0064]
经计算,驱动轴参数异常判断函数数值小于1,判定驱动轴参数正常。
[0065]
经计算,前轮车轮转速参数异常判断函数数值大于1,判定底盘前轮转速参数异常,同时左轮转速明显高于右轮转速,判定底盘左前轮异常打滑。进行前轮左右轮转速调整控制。其转速调整过程的动态参数,根据pid算法或者其它智能优化算法计算得出。
[0066]
水田动力装备底盘四个轮子的实时转速以及动力分配情况将中控显示屏上显示。
[0067]
第三步、执行动力分配调整。中央控制单元31将第二步中计算的转速分配动态参数通过动力输出控制器将弱电信号转换成与左前轮电控刹车器7相匹配的电流信号,启动左前轮电动刹车片7对左前轮3施加摩擦力,与此同时右前轮1通过前轮差速器20的反作用力下,逐渐获得更多的转速和扭矩,从而提高底盘的整体牵引效率。与此同时调整后的扭矩和转速信号通过传感器再次进入系统,形成闭环控制。
[0068]
2)双轮同时打滑状态下实施例(以左前轮3、右前轮1同时打滑为例):
[0069]
当底盘在水田环境中行进作业,左前轮3、右前轮1同时打滑时,两轮转速均快速上升,底盘整体牵引力下降,行进速度下降,其余各关键参数的变化状态如图5和图6所示。
[0070]
第一步,信息采集。底盘四个轮子的转速传感器和驱动轴上的扭矩传感器采集的信号信息如图5所示。
[0071]
第二步,多传感器信息融合计算。采集器将第一步中的各路信号采集后,传入微控制处理器,进行多传感器信息融合计算。
[0072]
经计算,驱动轴参数异常判断函数数值大于1,判定驱动轴参数异常。
[0073]
经计算,前轮车轮转速参数异常判断函数数值小于1,判定底盘前轮转速参数正常,即左前轮3转速与右前轮1转速基本平衡,综合判定底盘左前轮3与右前轮1同时出现打滑。需进行前后轴扭矩调整控制。其扭矩调整过程的动态参数,根据pid算法或者其它智能优化算法计算得出。
[0074]
水田动力装备底盘四个轮子的实时转速以及动力分配情况将中控显示屏上显示。
[0075]
第三步,执行动力分配调整。中央控制单元将第二步中计算的转速分配动态参数通过动力输出控制器将弱电信号转换成与前桥传动轴电控摩擦式离合器18、后桥传动轴电控摩擦式离合器17相匹配的电流信号,此时动力匹配器将控制前桥传动轴电控摩擦式离合器18处于半离合状态,降低前桥的整体驱动能力,通过分动箱16将大部分的动力通过后桥驱动轴21以及后桥传动轴电控摩擦式离合器17传递到后桥驱动轴22,使两个后轮得到更大的驱动能力,通过前、后桥传动轴电控摩擦式离合器的离合程度调整前后驱动轴的扭矩分配比例,从而提高底盘的牵引效率。与此同时调整后的扭矩和转速信号通过传感器再次进入系统,形成闭环控制。
[0076]
本说明书未作详细描述的内容属于本领域专业技术人员公知的现有技术。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips