
 商标分类
商标分类  商标转让
商标转让 
一种分层式稀土钵取土装置的制作方法
 2021-01-30 17:01:00|
2021-01-30 17:01:00| 238|
238| 起点商标网
起点商标网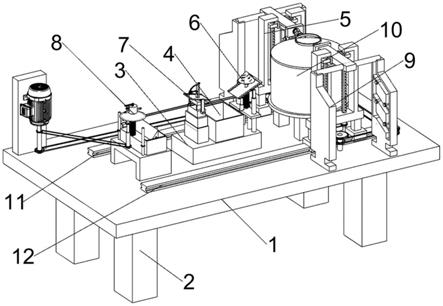
[0001]
本发明涉及一种稀土领域,尤其涉及一种分层式稀土钵取土装置。
背景技术:
[0002]
稀土是化学周期表中镧系元素和钪、钇共十七种金属元素的总称。自然界中有250种稀土矿。
[0003]
目前,现有技术稀土生产过程中,一般需要将稀土矿转化为稀土盐沉淀,如草酸稀土,碳酸氢氨稀土等,再对稀土盐进行脱水等作业,脱水后的稀土盐进行灼烧得到稀土氧化物,稀土灼烧过程中首先将稀土盐沉淀中的水分蒸干,待水分蒸干后,剩下纯净的稀土盐沉淀,然后稀土盐沉淀开始受热分解,进而再次进行热分解化学反应,在水分蒸干后稀土氧化物结合紧密,在进行受热分解后化学产物结合更加紧密,进而得到的稀土氧化物靠近稀土钵内壁的部分与稀土钵紧密粘连,形成固接,在人工处理阶段,稀土钵温度较高,人工采用工具取出,然后进行人工取土操作,容易灼伤工作人员,且人工取土,难以将稀土钵内壁固结的稀土取出,同时稀土钵内部稀土氧化物中央部分稀土人工采用工具容易取出,但是靠近内壁的部分与稀土钵粘连较紧,不易取出造成了稀土浪费,同时与稀土钵内壁固结连接的稀土难以去除,造成了后续稀土钵的清理不便。
[0004]
针对上述问题,我们提出了一种分层式稀土钵取土装置。
技术实现要素:
[0005]
为了克服现有技术稀土生产过程中,一般需要将稀土矿转化为稀土盐沉淀,如草酸稀土,碳酸氢氨稀土等,再对稀土盐进行脱水等作业,脱水后的稀土盐进行灼烧得到稀土氧化物,稀土灼烧过程中首先将稀土盐沉淀中的水分蒸干,待水分蒸干后,剩下纯净的稀土盐沉淀,然后稀土盐沉淀开始受热分解,进而再次进行热分解化学反应,在水分蒸干后稀土氧化物结合紧密,在进行受热分解后化学产物结合更加紧密,进而得到的稀土氧化物靠近稀土钵内壁的部分与稀土钵紧密粘连,形成固接,在人工处理阶段,稀土钵温度较高,人工采用工具取出,然后进行人工取土操作,容易灼伤工作人员,且人工取土,难以将稀土钵内壁固结的稀土取出,同时稀土钵内部稀土氧化物中央部分稀土人工采用工具容易取出,但是靠近内壁的部分与稀土钵粘连较紧,不易取出造成了稀土浪费,同时与稀土钵内壁固结连接的稀土难以去除,造成了后续稀土钵的清理不便的缺点,本发明的技术问题是:提供一种分层式稀土钵取土装置。
[0006]
本发明的技术实施方案为:一种分层式稀土钵取土装置,包括有工作机床板、固定支撑柱、加高工作台、收集舱、第一容器迁移机构、松土取土机构、外围土取土机构、固结土分离机构、第二容器迁移机构、电窑炉、第一电动直线滑轨和第二电动直线滑轨;工作机床板下方与固定支撑柱进行焊接;工作机床板上方与加高工作台相连接;加高工作台上方设置有收集舱;工作机床板上方依次与第一电动直线滑轨和第二电动直线滑轨进行螺栓连接;工作机床板上方设置有电窑炉;工作机床板上方与第一容器迁移机构相连接;工作机床
板上方与第二容器迁移机构相连接;第二容器迁移机构与第一容器迁移机构相连接;第一容器迁移机构下方与第一电动直线滑轨进行滑动连接;第二容器迁移机构下方与第二电动直线滑轨进行滑动连接;加高工作台上方依次与松土取土机构和外围土取土机构相连接;松土取土机构与外围土取土机构相连接;外围土取土机构与固结土分离机构相连接;固结土分离机构下方与工作机床板相连接;固结土分离机构与第一容器迁移机构相连接。
[0007]
进一步的,第一容器迁移机构包括有第一轨迹控制板、轨道滑柱、第二轨迹控制板、中空连接柱、内螺纹滑板、第一丝杆、固定框架、第二丝杆、第一转轴杆、第一传动轮、第一平齿轮、第二平齿轮、第二转轴杆、第二传动轮、第三传动轮、第四传动轮、第三转轴杆、第五传动轮、第四转轴杆、第六传动轮、第一电动转轴、伸缩连接座和第一半圆环夹;第一轨迹控制板与轨道滑柱进行滑动连接;轨道滑柱与第二轨迹控制板进行滑动连接;轨道滑柱与中空连接柱相连接;中空连接柱内侧与内螺纹滑板进行滑动连接;内螺纹滑板与第一丝杆进行滑动连接;第一丝杆与固定框架进行转动连接;固定框架与第二丝杆进行转动连接;第二丝杆外表面与内螺纹滑板进行滑动连接;第二丝杆下方与第一转轴杆进行固接;第一转轴杆外表面与第一传动轮进行固接;第一转轴杆下方与第一平齿轮进行固接;第一平齿轮与第二平齿轮进行啮合;第二平齿轮轴心与第二转轴杆进行固接;第二转轴杆外表面依次与第二传动轮和第三传动轮进行固接;第一丝杆下方与第三转轴杆进行固接;第三转轴杆外表面与第四传动轮进行固接;第四传动轮外环面通过皮带与第一传动轮进行传动连接;第二传动轮外环面通过皮带与第五传动轮进行传动连接;第五传动轮轴心与第四转轴杆进行固接;第四转轴杆外表面与第六传动轮进行固接;中空连接柱与第一电动转轴相连接;第一电动转轴与伸缩连接座相连接;伸缩连接座与第一半圆环夹相连接;第六传动轮与第二容器迁移机构相连接;第四转轴杆下方与工作机床板相连接;第二转轴杆下方与工作机床板相连接;第三传动轮与固结土分离机构相连接;第一轨迹控制板下方与工作机床板相连接;第二轨迹控制板下方与工作机床板相连接。
[0008]
进一步的,松土取土机构包括有第一电动推杆、第一集合板、第二电动推杆、第一支撑滑柱、第二支撑滑柱、第一收集斜板、第五转轴杆、第三平齿轮、第七传动轮、第一长齿轮和取土锥;第一电动推杆上方与第一集合板相连接;第一集合板下方与第二电动推杆相连接;第一集合板内侧依次与第一支撑滑柱和第二支撑滑柱进行滑动连接;第一支撑滑柱上方与第一收集斜板相连接;第一收集斜板下方与第二支撑滑柱相连接;第一支撑滑柱靠近第一支撑滑柱一侧设置有第五转轴杆;第五转轴杆外表面依次与第三平齿轮和第七传动轮进行固接;第一集合板上方与第一长齿轮进行转动连接;第一长齿轮轴心与取土锥进行固接;第一长齿轮与第三平齿轮进行啮合;第一电动推杆下方与加高工作台相连接;第二电动推杆下方与加高工作台相连接;第一支撑滑柱下方与加高工作台相连接;第二支撑滑柱下方与加高工作台相连接;第五转轴杆下方与加高工作台相连接;第七传动轮与外围土取土机构相连接。
[0009]
进一步的,外围土取土机构包括有第一集合架台、第二收集斜板、下层斜板、第三电动推杆、第六转轴杆、第四平齿轮、固定横杆、弧形刮板、第七转轴杆、第八传动轮、第九传动轮和第五平齿轮;第一集合架台上方与第二收集斜板相连接;第一集合架台上方与下层斜板相连接;下层斜板与第三电动推杆相连接;第三电动推杆上方与第六转轴杆进行转动连接;第六转轴杆外表面与第四平齿轮进行固接;第六转轴杆外表面与固定横杆相连接;固
定横杆与弧形刮板相连接;弧形刮板与第六转轴杆相连接;第一集合架台上方与第七转轴杆进行转动连接;第七转轴杆外表面依次与第八传动轮和第九传动轮进行固接;第七转轴杆与第五平齿轮进行固接;第一集合架台下方与加高工作台相连接;第八传动轮与固结土分离机构相连接;第九传动轮与第七传动轮相连接。
[0010]
进一步的,固结土分离机构包括有动力电机、电机板座、第八转轴杆、第十传动轮、第十一传动轮、下层控制机构和刮土机构;动力电机与电机板座进行螺栓连接;动力电机输出轴与第八转轴杆进行固接;第八转轴杆外表面依次与第十传动轮和第十一传动轮进行固接;第十传动轮外环面通过皮带与下层控制机构相连接;下层控制机构上方与刮土机构相连接;电机板座下方与工作机床板相连接;第十一传动轮与第三传动轮相连接;下层控制机构下方与工作机床板相连接;下层控制机构与第八传动轮相连接。
[0011]
进一步的,第一轨迹控制板包括有异形轨道板、第一上翻单向扭力弹簧转轴板、第二上翻单向扭力弹簧转轴板、第一下翻单向扭力弹簧转轴板和第二下翻单向扭力弹簧转轴板;异形轨道板依次与第一上翻单向扭力弹簧转轴板和第二上翻单向扭力弹簧转轴板进行转动连接;异形轨道板依次与第一下翻单向扭力弹簧转轴板和第二下翻单向扭力弹簧转轴板进行转动连接;异形轨道板下方与工作机床板相连接;异形轨道板与轨道滑柱相连接。
[0012]
进一步的,下层控制机构包括有第二集合架台、集合框板、第九转轴杆、第十二传动轮、第六平齿轮、第十三传动轮、第一直角三棱柱台、第一限位滑柱、第二限位滑柱、第二长齿轮、防护下料锥形圆盘、第四电动推杆、第二直角三棱柱台、第三限位滑柱和第四限位滑柱;第二集合架台上方与集合框板相连接;第二集合架台上方与第九转轴杆进行转动连接;第九转轴杆外表面依次与第十二传动轮、第六平齿轮和第十三传动轮进行固接;第二集合架台上方设置有第一直角三棱柱台;第一直角三棱柱台一侧与第一限位滑柱进行滑动连接,并且第一直角三棱柱台另一侧与第二限位滑柱进行滑动连接;第二限位滑柱下方与第二集合架台相连接;第一限位滑柱下方与第二集合架台相连接;第一直角三棱柱台上方与第二长齿轮进行转动连接;第二长齿轮轴心与防护下料锥形圆盘进行固接;集合框板与第四电动推杆相连接;第四电动推杆与第二直角三棱柱台相连接;第二直角三棱柱台一侧与第三限位滑柱进行滑动连接,并且第二直角三棱柱台另一侧与第四限位滑柱进行滑动连接;第三限位滑柱与集合框板相连接;第四限位滑柱与集合框板相连接;第二直角三棱柱台与第一直角三棱柱台进行滑动连接;第二集合架台下方与工作机床板相连接;防护下料锥形圆盘上方与刮土机构相连接;第十三传动轮与第八传动轮相连接;第十二传动轮与第十传动轮相连接。
[0013]
进一步的,刮土机构包括有控制圆柱筒座、第一侧壁刮条、第二侧壁刮条、承载滑动条板、第五电动推杆、齿杆、第七平齿轮、轴承双侧架板、第八平齿轮和翻转刮板;控制圆柱筒座一侧与第一侧壁刮条相连接,并且控制圆柱筒座另一侧与第二侧壁刮条相连接;控制圆柱筒座与承载滑动条板相连接;承载滑动条板与第五电动推杆相连接;第五电动推杆与齿杆相连接;齿杆下方与承载滑动条板进行滑动连接;齿杆上方与第七平齿轮进行啮合;第七平齿轮与轴承双侧架板进行转动连接;第七平齿轮上方与第八平齿轮进行啮合;第八平齿轮与轴承双侧架板进行转动连接;第八平齿轮轴心与翻转刮板进行固接;控制圆柱筒座下方与防护下料锥形圆盘相连接。
[0014]
进一步的,取土锥表面设置有多组弧形板。
[0015]
进一步的,翻转刮板端头设置为弧形。
[0016]
有益效果为:(1)、为解决现有技术稀土生产过程中,一般需要将稀土矿转化为稀土盐沉淀,如草酸稀土,碳酸氢氨稀土等,再对稀土盐进行脱水等作业,脱水后的稀土盐进行灼烧得到稀土氧化物,稀土灼烧过程中首先将稀土盐沉淀中的水分蒸干,待水分蒸干后,剩下纯净的稀土盐沉淀,然后稀土盐沉淀开始受热分解,进而再次进行热分解化学反应,在水分蒸干后稀土氧化物结合紧密,在进行受热分解后化学产物结合更加紧密,进而得到的稀土氧化物靠近稀土钵内壁的部分与稀土钵紧密粘连,形成固接,在人工处理阶段,稀土钵温度较高,人工采用工具取出,然后进行人工取土操作,容易灼伤工作人员,且人工取土,难以将稀土钵内壁固结的稀土取出,同时稀土钵内部稀土氧化物中央部分稀土人工采用工具容易取出,但是靠近内壁的部分与稀土钵粘连较紧,不易取出造成了稀土浪费,同时与稀土钵内壁固结连接的稀土难以去除,造成了后续稀土钵的清理不便的问题;
[0017]
(2)、设计了第一容器迁移机构,松土取土机构,外围土取土机构,固结土分离机构和第二容器迁移机构,在使用时首先控制第一容器迁移机构和第二容器迁移机构将稀土钵取出,即第一容器迁移机构和第二容器迁移机构对稀土钵进行夹持固定,然后控制第一容器迁移机构和第二容器迁移机构带动稀土钵进行同步移动,进而带动稀土钵依次运动至松土取土机构、外围土取土机构和固结土分离机构上方,进而依次进行稀土氧化物的取出,将内壁;
[0018]
(3)、实现了对灼烧后高温稀土钵的自动取出和移动定位,同时能依靠机械传动适应稀土钵内壁的特殊形状,将稀土钵中靠近中央位置和紧贴内表面的稀土氧化物挖出,并且将稀土钵内壁灼烧后固结至其内壁的稀土氧化物刮除,完成了对稀土钵的灼烧后清洁,充分提取灼烧后的稀土氧化物的效果。
附图说明
[0019]
图1为本发明的立体结构示意图;
[0020]
图2为本发明的第一容器迁移机构立体结构示意图;
[0021]
图3为本发明的松土取土机构立体结构示意图;
[0022]
图4为本发明的外围土取土机构立体结构示意图;
[0023]
图5为本发明的固结土分离机构立体结构示意图;
[0024]
图6为本发明的第一轨迹控制板立体结构示意图;
[0025]
图7为本发明的下层控制机构第一立体结构示意图;
[0026]
图8为本发明的下层控制机构第二立体结构示意图;
[0027]
图9为本发明的刮土机构立体结构示意图。
[0028]
图中零部件名称及序号:1_工作机床板,2_固定支撑柱,3_加高工作台,4_收集舱,5_第一容器迁移机构,6_松土取土机构,7_外围土取土机构,8_固结土分离机构,9_第二容器迁移机构,10_电窑炉,11_第一电动直线滑轨,12_第二电动直线滑轨,501_第一轨迹控制板,502_轨道滑柱,503_第二轨迹控制板,504_中空连接柱,505_内螺纹滑板,506_第一丝杆,507_固定框架,508_第二丝杆,509_第一转轴杆,5010_第一传动轮,5011_第一平齿轮,5012_第二平齿轮,5013_第二转轴杆,5014_第二传动轮,5015_第三传动轮,5016_第四传动轮,5017_第三转轴杆,5018_第五传动轮,5019_第四转轴杆,5020_第六传动轮,5021_第一
电动转轴,5022_伸缩连接座,5023_第一半圆环夹,601_第一电动推杆,602_第一集合板,603_第二电动推杆,604_第一支撑滑柱,605_第二支撑滑柱,606_第一收集斜板,607_第五转轴杆,608_第三平齿轮,609_第七传动轮,6010_第一长齿轮,6011_取土锥,701_第一集合架台,702_第二收集斜板,703_下层斜板,704_第三电动推杆,705_第六转轴杆,706_第四平齿轮,707_固定横杆,708_弧形刮板,709_第七转轴杆,7010_第八传动轮,7011_第九传动轮,7012_第五平齿轮,801_动力电机,802_电机板座,803_第八转轴杆,804_第十传动轮,805_第十一传动轮,806_下层控制机构,807_刮土机构,50101_异形轨道板,50102_第一上翻单向扭力弹簧转轴板,50103_第二上翻单向扭力弹簧转轴板,50104_第一下翻单向扭力弹簧转轴板,50105_第二下翻单向扭力弹簧转轴板,80601_第二集合架台,80602_集合框板,80603_第九转轴杆,80604_第十二传动轮,80605_第六平齿轮,80606_第十三传动轮,80607_第一直角三棱柱台,80608_第一限位滑柱,80609_第二限位滑柱,80610_第二长齿轮,80611_防护下料锥形圆盘,80612_第四电动推杆,80613_第二直角三棱柱台,80614_第三限位滑柱,80615_第四限位滑柱,80701_控制圆柱筒座,80702_第一侧壁刮条,80703_第二侧壁刮条,80704_承载滑动条板,80705_第五电动推杆,80706_齿杆,80707_第七平齿轮,80708_轴承双侧架板,80709_第八平齿轮,80710_翻转刮板。
具体实施方式
[0029]
下面结合附图详细说明本发明的优选技术方案。
[0030]
实施例1
[0031]
一种分层式稀土钵取土装置,如图1-9所示,包括有工作机床板1、固定支撑柱2、加高工作台3、收集舱4、第一容器迁移机构5、松土取土机构6、外围土取土机构7、固结土分离机构8、第二容器迁移机构9、电窑炉10、第一电动直线滑轨11和第二电动直线滑轨12;工作机床板1下方与固定支撑柱2进行焊接;工作机床板1上方与加高工作台3相连接;加高工作台3上方设置有收集舱4;工作机床板1上方依次与第一电动直线滑轨11和第二电动直线滑轨12进行螺栓连接;工作机床板1上方设置有电窑炉10;工作机床板1上方与第一容器迁移机构5相连接;工作机床板1上方与第二容器迁移机构9相连接;第二容器迁移机构9与第一容器迁移机构5相连接;第一容器迁移机构5下方与第一电动直线滑轨11进行滑动连接;第二容器迁移机构9下方与第二电动直线滑轨12进行滑动连接;加高工作台3上方依次与松土取土机构6和外围土取土机构7相连接;松土取土机构6与外围土取土机构7相连接;外围土取土机构7与固结土分离机构8相连接;固结土分离机构8下方与工作机床板1相连接;固结土分离机构8与第一容器迁移机构5相连接。
[0032]
在使用分层式稀土钵取土装置时,首先将此装置稳定固定至工作平面,然后外接电源,外接控制器,然后将稀土盐沉淀加入至稀土钵,然后将装有稀土盐沉淀的两个稀土钵上下堆叠放置在电窑炉10内部进行灼烧加热蒸发水分并进一步灼烧得到稀土氧化物,然后打开电窑炉10,控制第一容器迁移机构5和第二容器迁移机构9将电窑炉10内部的稀土钵取出,即第一容器迁移机构5和第二容器迁移机构9对稀土钵进行夹持固定,然后控制第一电动直线滑轨11和第二电动直线滑轨12分别带动第一容器迁移机构5和第二容器迁移机构9进行同步运动,即第一容器迁移机构5和第二容器迁移机构9带动稀土钵进行同步移动,进而带动稀土钵依次运动至松土取土机构6、外围土取土机构7和固结土分离机构8上方,进而
依次进行稀土氧化物的取出,将内壁,实现了对灼烧后高温稀土钵的自动取出和移动定位,同时能依靠机械传动适应稀土钵内壁的特殊形状,将稀土钵中靠近中央位置和紧贴内表面的稀土氧化物挖出,并且将稀土钵内壁灼烧后固结至其内壁的稀土氧化物刮除,完成了对稀土钵的灼烧后清洁,充分提取灼烧后的稀土氧化物的效果。
[0033]
所述,第一容器迁移机构5包括有第一轨迹控制板501、轨道滑柱502、第二轨迹控制板503、中空连接柱504、内螺纹滑板505、第一丝杆506、固定框架507、第二丝杆508、第一转轴杆509、第一传动轮5010、第一平齿轮5011、第二平齿轮5012、第二转轴杆5013、第二传动轮5014、第三传动轮5015、第四传动轮5016、第三转轴杆5017、第五传动轮5018、第四转轴杆5019、第六传动轮5020、第一电动转轴5021、伸缩连接座5022和第一半圆环夹5023;第一轨迹控制板501与轨道滑柱502进行滑动连接;轨道滑柱502与第二轨迹控制板503进行滑动连接;轨道滑柱502与中空连接柱504相连接;中空连接柱504内侧与内螺纹滑板505进行滑动连接;内螺纹滑板505与第一丝杆506进行滑动连接;第一丝杆506与固定框架507进行转动连接;固定框架507与第二丝杆508进行转动连接;第二丝杆508外表面与内螺纹滑板505进行滑动连接;第二丝杆508下方与第一转轴杆509进行固接;第一转轴杆509外表面与第一传动轮5010进行固接;第一转轴杆509下方与第一平齿轮5011进行固接;第一平齿轮5011与第二平齿轮5012进行啮合;第二平齿轮5012轴心与第二转轴杆5013进行固接;第二转轴杆5013外表面依次与第二传动轮5014和第三传动轮5015进行固接;第一丝杆506下方与第三转轴杆5017进行固接;第三转轴杆5017外表面与第四传动轮5016进行固接;第四传动轮5016外环面通过皮带与第一传动轮5010进行传动连接;第二传动轮5014外环面通过皮带与第五传动轮5018进行传动连接;第五传动轮5018轴心与第四转轴杆5019进行固接;第四转轴杆5019外表面与第六传动轮5020进行固接;中空连接柱504与第一电动转轴5021相连接;第一电动转轴5021与伸缩连接座5022相连接;伸缩连接座5022与第一半圆环夹5023相连接;第六传动轮5020与第二容器迁移机构9相连接;第四转轴杆5019下方与工作机床板1相连接;第二转轴杆5013下方与工作机床板1相连接;第三传动轮5015与固结土分离机构8相连接;第一轨迹控制板501下方与工作机床板1相连接;第二轨迹控制板503下方与工作机床板1相连接。
[0034]
首先打开电窑炉10,并关闭电窑炉10电源,稀土钵为圆柱体,圆柱外侧壁底部设置有一圈宽度与第一半圆环夹5023相同的凹槽,且稀土钵内底部为半球形下凹弧面,然后第十一传动轮805带动第三传动轮5015进行转动,进而第三传动轮5015带动第二转轴杆5013进行转动,即第二转轴杆5013带动第二传动轮5014进行转动,然后第二传动轮5014带动第五传动轮5018进行转动,进而第五传动轮5018带动第四转轴杆5019进行转动,第四转轴杆5019带动第六传动轮5020进行转动,第二转轴杆5013带动第二平齿轮5012进行转动,进而第二平齿轮5012带动第一平齿轮5011进行转动,然后第一平齿轮5011带动第一转轴杆509进行转动,进而第一转轴杆509带动第一传动轮5010进行转动,然后第一传动轮5010带动第四传动轮5016进行转动,进而第四传动轮5016带动第三转轴杆5017进行转动,第三转轴杆5017带动第一丝杆506进行转动,同时第一转轴杆509带动第二丝杆508进行转动,然后第二丝杆508和第一丝杆506进行同步转动,进而第二丝杆508和第一丝杆506进行同步转动带动内螺纹滑板505向下运动,进而内螺纹滑板505带动中空连接柱504向下运动,即中空连接柱504带动轨道滑柱502在第一轨迹控制板501和第二轨迹控制板503向下运动,进而轨道滑柱
502在第一轨迹控制板501和第二轨迹控制板503向下运动至底部后,然后控制第三传动轮5015进行反转,进而第二丝杆508和第一丝杆506进行同步转动带动内螺纹滑板505向上运动,进而内螺纹滑板505又通过中空连接柱504带动轨道滑柱502在第一轨迹控制板501和第二轨迹控制板503向上运动,受到第一轨迹控制板501和第二轨迹控制板503的轨道控制,进而轨道滑柱502带动中空连接柱504在向上运动的过程中带动中空连接柱504向靠近稀土钵的方向运动,进而中空连接柱504通过第一电动转轴5021和伸缩连接座5022带动第一半圆环夹5023嵌入至稀土钵外侧壁底部设置有的一圈宽度与第一半圆环夹5023相同的凹槽内部,同时第六传动轮5020带动第二容器迁移机构9执行相同操作,即两个第一半圆环夹5023将稀土钵从电窑炉10内部夹持取出,完成了对稀土钵的取出。
[0035]
所述,松土取土机构6包括有第一电动推杆601、第一集合板602、第二电动推杆603、第一支撑滑柱604、第二支撑滑柱605、第一收集斜板606、第五转轴杆607、第三平齿轮608、第七传动轮609、第一长齿轮6010和取土锥6011;第一电动推杆601上方与第一集合板602相连接;第一集合板602下方与第二电动推杆603相连接;第一集合板602内侧依次与第一支撑滑柱604和第二支撑滑柱605进行滑动连接;第一支撑滑柱604上方与第一收集斜板606相连接;第一收集斜板606下方与第二支撑滑柱605相连接;第一支撑滑柱604靠近第一支撑滑柱604一侧设置有第五转轴杆607;第五转轴杆607外表面依次与第三平齿轮608和第七传动轮609进行固接;第一集合板602上方与第一长齿轮6010进行转动连接;第一长齿轮6010轴心与取土锥6011进行固接;第一长齿轮6010与第三平齿轮608进行啮合;第一电动推杆601下方与加高工作台3相连接;第二电动推杆603下方与加高工作台3相连接;第一支撑滑柱604下方与加高工作台3相连接;第二支撑滑柱605下方与加高工作台3相连接;第五转轴杆607下方与加高工作台3相连接;第七传动轮609与外围土取土机构7相连接。
[0036]
首先然后控制第一电动直线滑轨11和第二电动直线滑轨12分别带动第一容器迁移机构5和第二容器迁移机构9进行同步运动,即第一容器迁移机构5和第二容器迁移机构9带动稀土钵运动至松土取土机构6上方,然后控制第一电动转轴5021进行转动,进而第一电动转轴5021带动伸缩连接座5022和第一半圆环夹5023进行转动,然后第一容器迁移机构5和第二容器迁移机构9内部的两个第一半圆环夹5023带动稀土钵转动一百八十度,即稀土钵开口朝下,然后第一容器迁移机构5和第二容器迁移机构9再带动稀土钵位置下降,即带动稀土钵运动至取土锥6011上方,即取土锥6011插入至稀土钵内部的稀土氧化物中,同时第九传动轮7011带动第七传动轮609进行转动,进而第七传动轮609带动第五转轴杆607进行转动,然后第五转轴杆607带动第三平齿轮608进行转动,进而第三平齿轮608带动第一长齿轮6010进行转动,进而第一长齿轮6010带动取土锥6011进行转动,然后取土锥6011转动将稀土钵内部的稀土氧化物搅动松动,然后稀土钵内部的土掉落至第一收集斜板606上方,然后花落至收集舱4内部,然后控制第一电动推杆601和第二电动推杆603慢慢向上伸出,即第一电动推杆601和第二电动推杆603带动第一集合板602向上运动,进而第一集合板602带动第一长齿轮6010和取土锥6011继续向上运动,即取土锥6011向上继续深入稀土钵内部,第三平齿轮608和第一长齿轮6010保持啮合,进而第一长齿轮6010带动取土锥6011进行持续转动,进而取土锥6011转动过程中向上推进,进而将稀土钵内部的稀土氧化物取出。
[0037]
所述,外围土取土机构7包括有第一集合架台701、第二收集斜板702、下层斜板703、第三电动推杆704、第六转轴杆705、第四平齿轮706、固定横杆707、弧形刮板708、第七
转轴杆709、第八传动轮7010、第九传动轮7011和第五平齿轮7012;第一集合架台701上方与第二收集斜板702相连接;第一集合架台701上方与下层斜板703相连接;下层斜板703与第三电动推杆704相连接;第三电动推杆704上方与第六转轴杆705进行转动连接;第六转轴杆705外表面与第四平齿轮706进行固接;第六转轴杆705外表面与固定横杆707相连接;固定横杆707与弧形刮板708相连接;弧形刮板708与第六转轴杆705相连接;第一集合架台701上方与第七转轴杆709进行转动连接;第七转轴杆709外表面依次与第八传动轮7010和第九传动轮7011进行固接;第七转轴杆709与第五平齿轮7012进行固接;第一集合架台701下方与加高工作台3相连接;第八传动轮7010与固结土分离机构8相连接;第九传动轮7011与第七传动轮609相连接。
[0038]
在松土取土机构6取土完成后,然后控制第一电动直线滑轨11和第二电动直线滑轨12分别带动第一容器迁移机构5和第二容器迁移机构9进行同步运动,即第一容器迁移机构5和第二容器迁移机构9带动稀土钵运动至外围土取土机构7上方,此时稀土钵开口依然朝下,然后控制第三电动推杆704向上推出,进而第三电动推杆704带动第六转轴杆705、第四平齿轮706、固定横杆707和弧形刮板708向上运动,进而带动第四平齿轮706向上运动至其与第五平齿轮7012啮合的位置,此时弧形刮板708接触到稀土钵靠近内壁的稀土氧化物,同时下层控制机构806带动第八传动轮7010进行转动,进而第八传动轮7010带动第七转轴杆709进行转动,进而第七转轴杆709带动第五平齿轮7012进行转动,然后第五平齿轮7012带动第四平齿轮706进行转动,然后第四平齿轮706带动第六转轴杆705、固定横杆707和弧形刮板708进行转动,进而弧形刮板708转动将稀土钵靠近内壁的稀土氧化物刮除取出。
[0039]
所述,固结土分离机构8包括有动力电机801、电机板座802、第八转轴杆803、第十传动轮804、第十一传动轮805、下层控制机构806和刮土机构807;动力电机801与电机板座802进行螺栓连接;动力电机801输出轴与第八转轴杆803进行固接;第八转轴杆803外表面依次与第十传动轮804和第十一传动轮805进行固接;第十传动轮804外环面通过皮带与下层控制机构806相连接;下层控制机构806上方与刮土机构807相连接;电机板座802下方与工作机床板1相连接;第十一传动轮805与第三传动轮5015相连接;下层控制机构806下方与工作机床板1相连接;下层控制机构806与第八传动轮7010相连接。
[0040]
首先控制第一电动直线滑轨11和第二电动直线滑轨12分别带动第一容器迁移机构5和第二容器迁移机构9进行同步运动,即第一容器迁移机构5和第二容器迁移机构9带动稀土钵运动至固结土分离机构8上方,此时稀土钵开口依然朝下,此时动力电机801带动第八转轴杆803、第十传动轮804和第十一传动轮805进行转动,进而第十传动轮804带动下层控制机构806进行运转,进而下层控制机构806带动刮土机构807向上伸入至稀土钵内部,进而下层控制机构806带动刮土机构807将稀土钵内壁上灼烧固结的稀土氧化物摩擦刮除。
[0041]
所述,第一轨迹控制板501包括有异形轨道板50101、第一上翻单向扭力弹簧转轴板50102、第二上翻单向扭力弹簧转轴板50103、第一下翻单向扭力弹簧转轴板50104和第二下翻单向扭力弹簧转轴板50105;异形轨道板50101依次与第一上翻单向扭力弹簧转轴板50102和第二上翻单向扭力弹簧转轴板50103进行转动连接;异形轨道板50101依次与第一下翻单向扭力弹簧转轴板50104和第二下翻单向扭力弹簧转轴板50105进行转动连接;异形轨道板50101下方与工作机床板1相连接;异形轨道板50101与轨道滑柱502相连接。
[0042]
当需要取出堆叠的两个稀土钵中的上侧稀土钵时,轨道滑柱502由异形轨道板
50101顶部开口下移进入异形轨道板50101,然后受到第一上翻单向扭力弹簧转轴板50102的阻挡,于是开始沿着第一上翻单向扭力弹簧转轴板50102上方的倾斜滑道向下滑动,然后又与第一下翻单向扭力弹簧转轴板50104相接触并下压开启第一下翻单向扭力弹簧转轴板50104进入其下方的滑道,然后立即控制第三传动轮5015进行反转,进而第二丝杆508和第一丝杆506进行同步转动带动内螺纹滑板505向上运动,即内螺纹滑板505通过中空连接柱504带动轨道滑柱502开始反向上移,然后轨道滑柱502受到第一下翻单向扭力弹簧转轴板50104的阻挡,沿着第一下翻单向扭力弹簧转轴板50104下方的倾斜滑道继续向上运动至第二上翻单向扭力弹簧转轴板50103上方的位置,此时轨道滑柱502带动中空连接柱504通过第一电动转轴5021和伸缩连接座5022带动第一半圆环夹5023嵌入至稀土钵外侧壁底部设置有的一圈宽度与第一半圆环夹5023相同的凹槽内部,然后轨道滑柱502继续上移穿过第一上翻单向扭力弹簧转轴板50102直至轨道滑柱502从异形轨道板50101顶端开口滑出,即此时两个第一半圆环夹5023将稀土钵从电窑炉10中取出,当需要取出堆叠的两个稀土钵中的下侧稀土钵时,则轨道滑柱502的运动过程与取堆叠的两个稀土钵中的上侧稀土钵时类似,需要穿过第二上翻单向扭力弹簧转轴板50103和第二下翻单向扭力弹簧转轴板50105,以及通过二者下方的滑道,进而实现对第一半圆环夹5023的上下升降以及前后运动的组合控制,达到了快速取出稀土钵的目的。
[0043]
所述,下层控制机构806包括有第二集合架台80601、集合框板80602、第九转轴杆80603、第十二传动轮80604、第六平齿轮80605、第十三传动轮80606、第一直角三棱柱台80607、第一限位滑柱80608、第二限位滑柱80609、第二长齿轮80610、防护下料锥形圆盘80611、第四电动推杆80612、第二直角三棱柱台80613、第三限位滑柱80614和第四限位滑柱80615;第二集合架台80601上方与集合框板80602相连接;第二集合架台80601上方与第九转轴杆80603进行转动连接;第九转轴杆80603外表面依次与第十二传动轮80604、第六平齿轮80605和第十三传动轮80606进行固接;第二集合架台80601上方设置有第一直角三棱柱台80607;第一直角三棱柱台80607一侧与第一限位滑柱80608进行滑动连接,并且第一直角三棱柱台80607另一侧与第二限位滑柱80609进行滑动连接;第二限位滑柱80609下方与第二集合架台80601相连接;第一限位滑柱80608下方与第二集合架台80601相连接;第一直角三棱柱台80607上方与第二长齿轮80610进行转动连接;第二长齿轮80610轴心与防护下料锥形圆盘80611进行固接;集合框板80602与第四电动推杆80612相连接;第四电动推杆80612与第二直角三棱柱台80613相连接;第二直角三棱柱台80613一侧与第三限位滑柱80614进行滑动连接,并且第二直角三棱柱台80613另一侧与第四限位滑柱80615进行滑动连接;第三限位滑柱80614与集合框板80602相连接;第四限位滑柱80615与集合框板80602相连接;第二直角三棱柱台80613与第一直角三棱柱台80607进行滑动连接;第二集合架台80601下方与工作机床板1相连接;防护下料锥形圆盘80611上方与刮土机构807相连接;第十三传动轮80606与第八传动轮7010相连接;第十二传动轮80604与第十传动轮804相连接。
[0044]
首先第十传动轮804带动第十二传动轮80604进行转动,然后第十二传动轮80604带动第九转轴杆80603进行转动,进而第九转轴杆80603带动第六平齿轮80605进行转动,进而第六平齿轮80605带动,然后第六平齿轮80605带动第二长齿轮80610进行转动,进而第二长齿轮80610带动防护下料锥形圆盘80611进行转动,然后防护下料锥形圆盘80611带动刮土机构807进行转动,然后控制第四电动推杆80612推出,即第四电动推杆80612带动第二直
角三棱柱台80613在第三限位滑柱80614和第四限位滑柱80615表面滑动,进而第二直角三棱柱台80613的斜面带动第一直角三棱柱台80607在第一限位滑柱80608和第二限位滑柱80609外表面向上运动,进而第一直角三棱柱台80607带动第二长齿轮80610和防护下料锥形圆盘80611向上运动,进而带动刮土机构807运动至稀土钵内部进行刮土操作。
[0045]
所述,刮土机构807包括有控制圆柱筒座80701、第一侧壁刮条80702、第二侧壁刮条80703、承载滑动条板80704、第五电动推杆80705、齿杆80706、第七平齿轮80707、轴承双侧架板80708、第八平齿轮80709和翻转刮板80710;控制圆柱筒座80701一侧与第一侧壁刮条80702相连接,并且控制圆柱筒座80701另一侧与第二侧壁刮条80703相连接;控制圆柱筒座80701与承载滑动条板80704相连接;承载滑动条板80704与第五电动推杆80705相连接;第五电动推杆80705与齿杆80706相连接;齿杆80706下方与承载滑动条板80704进行滑动连接;齿杆80706上方与第七平齿轮80707进行啮合;第七平齿轮80707与轴承双侧架板80708进行转动连接;第七平齿轮80707上方与第八平齿轮80709进行啮合;第八平齿轮80709与轴承双侧架板80708进行转动连接;第八平齿轮80709轴心与翻转刮板80710进行固接;控制圆柱筒座80701下方与防护下料锥形圆盘80611相连接。
[0046]
首先防护下料锥形圆盘80611带动控制圆柱筒座80701进行转动,进而控制圆柱筒座80701带动第一侧壁刮条80702和第二侧壁刮条80703进行转动,即对稀土钵的侧壁固结的稀土氧化物进行刮除,同时翻转刮板80710转动对稀土钵的弧形底端面进行刮除,控制第五电动推杆80705缓慢推出,进而第五电动推杆80705带动齿杆80706在承载滑动条板80704上方滑动,进而齿杆80706带动第七平齿轮80707进行转动,进而第七平齿轮80707带动第八平齿轮80709进行转动,然后第八平齿轮80709转动带动翻转刮板80710进行转动,进而翻转刮板80710缓慢实现围绕第八平齿轮80709轴心的一百八十度的转动,进而翻转刮板80710在翻转一百八十度过程中不断进行圆周运动对稀土钵底端面进行刮除,完成了对稀土钵内壁和底端面固接稀土氧化物的刮除。
[0047]
所述,取土锥6011表面设置有多组弧形板。
[0048]
以便于弧形板可以快速破坏稀土氧化物的结合状态,便于快速挖出稀土。
[0049]
所述,翻转刮板80710端头设置为弧形。
[0050]
以便于适应容器的半球形内底部,即翻转刮板80710的端头能够贴合稀土钵内底端面进行刮除。
[0051]
尽管已经参照本公开的特定示例性实施例示出并描述了本公开,但是本领域技术人员应该理解,在不背离所附权利要求及其等同物限定的本公开的精神和范围的情况下,可以对本公开进行形式和细节上的多种改变。因此,本公开的范围不应该限于上述实施例,而是应该不仅由所附权利要求来进行确定,还由所附权利要求的等同物来进行限定。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips