
 商标分类
商标分类  商标转让
商标转让 
用于钢圆管的自动焊接设备的制作方法
 2021-01-29 17:01:23|
2021-01-29 17:01:23| 284|
284| 起点商标网
起点商标网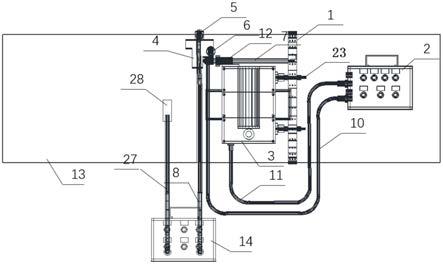
[0001]
本实用新型涉及建筑施工技术领域,尤其涉及一种用于钢圆管的自动焊接设备。
背景技术:
[0002]
随着钢结构建筑及装配式钢结构的逐年增多,钢圆管的拼装多采用焊接的形式,构件制作工厂及施工现场采用传统的电弧焊及二氧化碳气体保护焊的焊接方法,均采用人工操作焊接,且对人员的作业、防护要求多。其次,人工操作的焊接方法易出现焊缝质量缺陷如夹渣、气孔等质量差的现场,造成焊缝返工及修补,增加施工成本。与之对比后发现,自动焊接方法多采用在直线型较长的焊缝,用于圆钢管的自动焊接比较少,特别是施工现场的自动焊接方法。本实用新型采用小型易操作的自动焊接设备,形成自动钢圆管的焊接方法,提高焊接的速度及质量,是未来工地焊接的发展方向。
技术实现要素:
[0003]
本实用新型主要是针对现有技术的不足,提供一种用于钢圆管的自动焊接设备,提高钢圆管焊接的速度及质量。
[0004]
本实用新型所采用的技术方案为:一种用于钢圆管的自动焊接设备,其包括:
[0005]
圆形轨道,同轴套设在焊缝一侧的钢圆管上;
[0006]
磁力控制车,磁力吸附在所述钢圆管上,所述磁力控制车的靠近所述圆形轨道的一侧连接有导向机构,所述导向机构沿着所述圆形轨道移动;
[0007]
水平竖直调节机构,包括平行于所述钢圆管设置的水平调节杆和垂直于所述水平调节杆设置的竖直调节杆,所述水平调节杆外套设有一轴套,所述轴套固定于所述磁力控制车上,所述水平调节杆上还配合有一紧固螺母,所述竖直调节杆竖向可调地联接于所述水平调节杆上;
[0008]
焊接摆动器,连接于所述竖直调节杆上,焊接机构的焊枪安装于所述焊接摆动器上并在所述焊接摆动器的驱动下做水平向摆动和竖直向升降;以及
[0009]
电气控制机构,控制连接于所述焊接摆动器。
[0010]
所述用于钢圆管的自动焊接设备进一步的改进在于,所述导向机构包括轨道固定水平杆和轨道夹持件,所述轨道固定水平杆的一端固定于所述磁力控制车的侧部,所述轨道夹持件可移动地设于所述轨道固定水平杆上且夹设于所述圆形轨道。
[0011]
所述用于钢圆管的自动焊接设备进一步的改进在于,所述轨道固定水平杆上开有竖向贯穿的滑槽,所述轨道夹持件包括滑设于所述滑槽中的两根滑杆,所述滑杆的上端延伸出所述滑槽并连接有螺母。
[0012]
所述用于钢圆管的自动焊接设备进一步的改进在于,所述滑杆与所述轨道固定水平杆的连接节点设有十字孔件,所述十字孔件具有十字相贯的第一孔体和第二孔体,所述第一孔体套设于所述轨道固定水平杆上,所述第二孔体套设于所述滑杆上。
[0013]
所述用于钢圆管的自动焊接设备进一步的改进在于,所述轨道固定水平杆和所述
水平调节杆之间连接有固联板条。
[0014]
所述用于钢圆管的自动焊接设备进一步的改进在于,所述紧固螺母抵靠于所述轴套的远离所述圆形轨道的一侧。
[0015]
所述用于钢圆管的自动焊接设备进一步的改进在于,所述水平调节杆的远离所述圆形轨道的一端上连接有双向轴套,所述双向轴套具有轴向相垂直的第一轴孔和第二轴孔,所述第一轴孔套接于所述水平调节杆,所述第二轴孔套接于所述竖直调节杆。
[0016]
所述用于钢圆管的自动焊接设备进一步的改进在于,所述电气控制机构包括放置在所述钢圆管上的操作控制台、连接于所述操作控制台与所述焊接摆动器的信号线,以及连接于所述操作控制台与所述磁力控制车的电源线。
[0017]
所述用于钢圆管的自动焊接设备进一步的改进在于,所述焊接机构为 co
2
气体保护焊机,所述焊接摆动器上设有焊枪固定孔,所述co
2
气体保护焊机的焊枪固定在所述焊枪固定孔中。
[0018]
本实用新型提供一种用于钢圆管的自动焊接设备,在钢圆管焊缝位置布置自动焊接设备,调节好焊接的电流及速度后进行平稳的焊接,高效高质量的完成圆钢管焊缝的焊接。此自动焊接方法通过竖直调节杆能有效的适用焊缝的分层焊接,通过水平调节杆实现焊枪水平方向的移动,从而可根据坡口焊缝逐渐变宽进行多道水平焊接,最终实现自动焊接。
附图说明
[0019]
为了更清楚地说明本实用新型实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
[0020]
图1为本实用新型用于钢圆管的自动焊接设备的整体结构示意图。
[0021]
图2为本实用新型自动焊接设备中轨道的结构示意图。
[0022]
图3为本实用新型自动焊接设备中磁力控制车的结构示意图。
[0023]
图4为本实用新型自动焊接设备中水平竖直调节机构的结构示意图。
[0024]
图5为本实用新型水平竖直调节机构中双向轴套的结构示意图。
[0025]
图6为本实用新型自动焊接设备中导向机构的结构示意图。
[0026]
图7为本实用新型自动焊接设备中电气控制机构的结构示意图。
[0027]
图8为本实用新型用于钢圆管的自动焊接设备在安装圆形轨道时的示意图。
[0028]
图9为本实用新型自动焊接设备在安装磁力控制车时的示意图。
[0029]
图10为本实用新型自动焊接设备在安装水平竖直调节机构时的示意图。
[0030]
图11为本实用新型自动焊接设备在安装电气控制机构时的示意图。
[0031]
附图中标记的对应关系如下:
[0032]
1-圆形轨道、2-操作控制台、3-磁力控制车、4-焊接摆动器、5-焊枪、 6-竖直调节杆、7-水平调节杆、8-焊把线、9-滑杆、10-信号线、11-电源线、 12-轴套、121-紧固螺母、13-钢圆管、14-co
2
气体保护焊机、15-控制车把手、16-轨道固定杆连接孔、17-电源线连接孔、18-信号线连接孔、19-焊枪固定孔、20-双向轴套、21-第二轴孔、22-第一轴孔、23-轨道固定
水平杆、 24-螺母、25-十字孔件、26-连接螺母、27-接地线、28-接地铁片。
具体实施方式
[0033]
以下通过特定的具体实例说明本实用新型的实施方式,本领域技术人员可由本说明书所揭露的内容轻易地了解本实用新型的其他优点与功效。本实用新型还可以通过另外不同的具体实施方式加以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本实用新型的精神下进行各种修饰或改变。
[0034]
下面结合附图和具体实施例对本实用新型做进一步详细的说明。
[0035]
参阅图1所示,本实用新型实施例提供了一种用于钢圆管的自动焊接设备,主要通过可以水平向被动,竖直向分层的自动焊接,实现不同厚度钢圆管的焊接过程中的分层焊接,待人工清渣后进行下一层的焊接。
[0036]
如图1所示,该自动焊接设备主要包括一圆形轨道1、一磁力控制车3、一水平竖直调节机构、一焊接摆动器4、一电气控制机构2以及一焊接机构 14。其中,圆形轨道1同轴套设在焊缝一侧的钢圆管13上,圆形轨道1可以设置为直径可调的环形箍片,开口处通过螺栓和螺母配合固定,沿着环形箍片的周身间隔开设多个孔洞,供螺栓穿过后与螺母螺合固定,如图2所示。磁力控制车3通过磁力吸附在钢圆管13上,磁力控制车3采用电磁远离,通电后产生产生磁场,可以吸附在钢圆管13上。磁力控制车3的靠近圆形轨道 1的一侧连接有导向机构,该导向机构可沿着圆形轨道1移动,从而带着磁力控制车3可以环绕着钢圆管13移动。
[0037]
配合图3所示,磁力控制车3的两相对侧部分别设置有控制车把手15,手持该控制车把手15可以便于移动磁力控制车3。磁力控制车3的靠近圆形轨道1的一侧设置有两个轨道固定杆连接孔16,两个轨道固定杆连接孔16 对称设置在控制车把手15的两侧,用于安装轨道固定水平杆23,在磁力控制车3的下部还设置有一电源线连接孔17,用于通过电源线11连接操作控制台2,由操作控制台2给磁力控制车3提供电源。
[0038]
在配合图1和图6所示,导向机构进一步包括轨道固定水平杆23和轨道夹持件(图中未标记),轨道固定水平杆23的一端固定于磁力控制车13侧部的轨道固定杆连接孔16上,轨道固定水平杆23的端部螺纹拧合在轨道固定杆连接孔16中,轨道固定水平杆23的端部还设有有定位螺母26,起水平限位的作用。轨道夹持件可移动地设于轨道固定水平杆23上且夹设于圆形轨道1,在使用时,将圆形轨道1与钢圆管13相固定,将磁力控制车3通过磁力吸附在钢圆管13上,轨道夹持件的下部夹持在圆形轨道1上,轨道夹持件的上部与轨道固定水平杆23可相对移动地设置。进一步地,轨道固定水平杆 23上开有竖向贯穿的滑槽,轨道夹持件包括滑设于滑槽(图中未标示)中的两根滑杆9,两根滑杆9的上端延伸出滑槽并分别连接有一螺母24,滑杆9 下部的宽度大于滑槽的宽度,故而当拧紧螺母24时,可以固定住滑杆9与轨道固定水平杆23,避免焊接过程中晃动。滑杆9与轨道固定水平杆23的连接节点设有十字孔件25,十字孔件25具有十字相贯的第一孔体和第二孔体,第一孔体套设于轨道固定水平杆23上,第二孔体套设于滑杆9上,对轨道固定水平杆23与滑杆9的活动节点起到支撑加固作用,防止焊接过程的晃动。
[0039]
再配合图1和图4所示,水平竖直调节机构进一步包括平行于钢圆管13 设置的水平调节杆7和垂直于水平调节杆7设置的竖直调节杆6。轨道固定水平杆23的靠近圆形轨道1的一端与水平调节杆7之间固定有一固联板条(图中未标示),可以将轨道固定水平杆23、水
平调节杆7和磁力控制车3固定为一个整体,移动时整体移动,由轨道夹持件与轨道固定水平杆23之间的相对移动进行水平向移动。
[0040]
水平调节杆7外套设有一轴套12,水平调节杆7可相对于轴套12做水平移动,轴套12的底部焊接固定在磁力控制车3上部的一铁板件(图中未标示) 上,水平调节杆7上还配合有一紧固螺母121,水平调节杆7为螺杆,紧固螺母121与螺杆螺纹配合,紧固螺母121抵靠于轴套12的远离圆形轨道1的一侧。竖直调节杆6竖向可调地联接于水平调节杆7的远离圆形轨道1的一端上。其中,配合图4和图5所示,水平调节杆7的远离圆形轨道1的一端上连接有一双向轴套20,双向轴套20具有轴向相垂直的第一轴孔22和第二轴孔 21,第一轴孔22套接于水平调节杆7的端部,第二轴孔套21套设于竖直调节杆6外,并且竖直调节杆6可相对于第二轴孔套21沿竖直方向移动,沿着竖直调节杆6的长度方向在竖直调节杆6上开设有多个孔洞,在双向轴套20上对应开设有孔洞,通过螺栓和螺母固定对应的孔洞,来调节竖直调节杆6 的高度。
[0041]
焊接摆动器4设置在竖直调节杆6的下部,该焊接摆动器4可采用市场上可购买的产品:辰闯机械(上海)有限公司生产的焊接摇摆器(aw-b3/b4),其原理是通过信号控制内部的步进电机进行驱动,实现带动其上的焊枪运动,所做运动包括水平向的摆动以及竖直向的升降。焊接机构的焊枪5固定在焊接摆动器4上,焊接机构可采用co
2
气体保护焊机14,在焊接摆动器4 上设有焊枪固定孔,将co
2
气体保护焊机的焊枪5固定在焊枪固定孔中,由电气控制机构提供控制信号,控制焊接摆动器4驱动其上的焊枪5做水平向摆动,实现对焊缝的单层焊接,单层焊接完成后,驱动焊枪5做竖直向提升,实现对下一层焊缝的焊接,从而实现对一定深度的焊缝的分层焊接,而且由于钢结构焊缝一般是开坡口的,通过焊接摆动器4可以调节水平向摆动的摆幅,控制水平向焊接的宽度,满足根据坡口焊缝由下至上逐渐变宽的焊接要求。
[0042]
电气控制机构控制连接于焊接摆动器4。具体地,电气控制机构可包括放置在钢圆管13上的一操作控制台2、连接于操作控制台2与焊接摆动器4 的信号线10,以及连接于操作控制台2与磁力控制车3的电源线11,在焊接摆动器4的下部设有有一信号线连接孔18,供连接信号线10;同样地,在磁力控制车3的下部设有一电源线连接孔17,供连接电源线11。
[0043]
进一步配合图1和图7所示,焊接机构采用co
2
气体保护焊机14,co
2
气体保护焊机14上设有一焊把线8和一接地线27,焊把线8的另一端连接于焊枪5,接地线27的另一端连接于接地铁片28。
[0044]
下面结合图8~11对本实用新型用于钢圆管的自动焊接设备的具体使用步骤做进一步详细地说明。
[0045]
步骤一:圆形轨道的安装
[0046]
将圆形轨道1固定于钢圆管13上,圆形轨道1距离焊缝的位置应确保焊缝处于水平焊接摆动器4的调节范围内,如图8所示。
[0047]
步骤二:磁力控制车的安装
[0048]
将磁力控制车3通过磁力吸附在钢圆管13上,并将轨道夹持件夹持住圆形轨道1,将轨道固定水平杆23固定连接在磁力控制车3的靠近圆形轨道1 的一侧上,通过十字孔件将轨道夹持件及轨道固定水平杆23连接在一起,使磁力控制车3在行走的过程中总是沿着轨道夹持件与圆形轨道1相对移动的轨迹移动,如图9所示。
[0049]
步骤三:焊接摆动器的安装
[0050]
将紧固螺杆121套在水平调节杆7上,水平方向调节通过紧固螺杆121 的内螺纹与水平调节杆7的外螺纹相互转动实现。水平调节杆7端部与双向轴套20的第一轴孔相固定,并将竖直调节杆6固定于双向轴套20的第二轴孔内,采用铁板件进行轴套12与磁力控制车3进行固定,水平调节杆7插设在轴套12内。在竖直调节杆6下部固定有焊接摆动器4,焊接摆动器4有自动调节水平及竖直方向的驱动,由电气控制机构提供电信号来控制焊接摆动器4 驱动其上的焊枪5做水平向摆动或竖直向升降运动,如图10所示。
[0051]
步骤四:操作控制台的安装
[0052]
将操作控制台2稳定放置在钢圆管13上,操作控制台2用电源线11与磁力控制车3的电源连接,可为磁力控制车3供电,磁力控制车3通电后产生磁场,吸附在钢圆管13上,电力越强吸附能力越强,电力越弱吸附能力越小,在需要移动磁力控制车3时,操作控制台2减小电流,在需要固定磁力控制车3时,如进行焊接时,操作控制台2增大电流。操作控制台2用信号线10 与焊接摆动器4连接,实现控制信号的输出及焊接摆动器的竖向移动控制,如图11所示。
[0053]
步骤五:co
2
气体保护焊机的安装
[0054]
将co
2
气体保护焊机12放于地面上,将焊枪5固定于焊接摆动器4上的焊把手固定孔上,用焊把线连接co
2
气体保护焊机12的焊枪5,将接地铁片与地面连接,通过接地线连接co
2
气体保护焊机12的接地铁片28,如图1所示。
[0055]
步骤六:操作焊接
[0056]
接通电源线11、信号线10后,调节co
2
气体保护焊机12的电流及焊接速度,稳定后进行钢圆管间焊缝的分层焊接,由焊接摆动器4驱动焊枪5在水平方向上摆动,对焊缝的第一层进行焊接,第一层焊接完成后进行人工清渣处理,然后由焊接摆动器4驱动焊枪5上升至上一层对焊缝的第二层进行焊接,依次进行各层的焊接,直至完成焊接,过程中可通过焊接摆动器4 自动调节焊枪位置,实现焊缝深度方向上的分层焊接。
[0057]
步骤七:焊接设备的拆除
[0058]
焊接完成后,按步骤一至步骤五,以先装后拆的原则进行焊接设备的拆除及转入下一个焊接点。
[0059]
本实用新型提供一种用于钢圆管的自动焊接设备,在钢圆管焊缝位置布置自动焊接设备,调节好焊接的电流及速度后进行平稳的焊接,高效高质量的完成圆钢管焊缝的焊接。此自动焊接方法通过竖直调节杆能有效的适用焊缝的分层焊接,通过水平调节杆实现焊枪水平方向的移动,从而可根据坡口焊缝逐渐变宽进行多道水平焊接,最终实现自动焊接。
[0060]
需要说明的是,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本实用新型可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本实用新型所能产生的功效及所能达成的目的下,均应仍落在本实用新型所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
[0061]
以上所述仅是本实用新型的较佳实施例而已,并非对本实用新型做任何形式上的限制,虽然本实用新型已以较佳实施例揭露如上,然而并非用以限定本实用新型,任何熟悉本专业的技术人员,在不脱离本实用新型技术方案的范围内,当可利用上述揭示的技术内容作出些许更动或修饰为等同变化的等效实施例,但凡是未脱离本实用新型技术方案的内容,依据本实用新型的技术实质对以上实施例所作的任何简单修改、等同变化与修饰,均仍属于本实用新型技术方案的范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips