
 商标分类
商标分类  商标转让
商标转让 
一种连杆去毛刺装置的制作方法
 2021-01-29 16:01:34|
2021-01-29 16:01:34| 218|
218| 起点商标网
起点商标网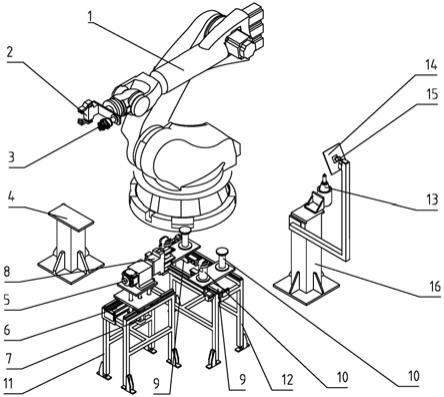
[0001]
本实用新型涉及一种连杆加工装置,特别是涉及一种连杆去毛刺装置。
背景技术:
[0002]
内燃机内部的连杆工件在经过最后的机床精加工工序后,连杆大小头端的两个端面和轴瓦孔边缘会因刀具的切削而产生十分细小的毛刺,两端面与工件锻压成型的毛坯面的相交处也存在磨削加工产生的细小毛刺。以上毛刺若不有效去除,毛刺在内燃机高速工作过程中脱落,其产生的金属颗粒会对润滑油膜造成致命破坏,严重影响内燃机使用寿命。该毛刺若采用传统的旋转刀具倒角去除反而会产生二次毛刺,二次毛刺的体积可能会更大。并且由于连杆工件各个表面已完成最后的精加工工艺,各精加工端面和内孔均不允许出现压痕和碰疤,所以在机床上使用精加工表面对工件进行夹紧定位,然后进行倒角工艺的方法,极易破坏精加工表面。
[0003]
目前,连杆生产线中基本都采用人工手动去除此类细小毛刺,工人使用高硬度刀片对精加工后的端面和内孔边缘进行手动刮削,在刮削过程中去除细小毛刺和产生微小倒角,从而保证不破坏精加工后的表面和不产生二次毛刺。但该工艺占用工人数量大,工人长时间工作后易出现刮削力不稳定,毛刺去除效果起伏大,倒角角度不准确误差大,或者漏加工等情况,严重影响产品良品率,增加生产成本,同时长期工作后工人易出现腕部劳损等职业病,在当前企业招工难,企业更加注重员工健康福利的社会大环境下,此工艺的弊端更加明显。
技术实现要素:
[0004]
本实用新型针对现有连杆精加工后细小毛刺采用人工去除占用工人量大、劳动强度大、加工成本高、效率低、质量得不到保障的技术问题,提供一种不需要大量人工参与、加工效率高、质量可靠、加工成本较低的连杆去毛刺装置。
[0005]
为此,本实用新型的技术方案是,一种连杆去毛刺装置,设有抓取系统、找正系统、拍照识别系统、刮削系统和翻转系统;抓取系统设有机器人本体,机器人本体上设有夹取手爪和定心手爪,找正系统设有正位平台,拍照识别系统设有视觉相机,刮削系统设有浮动刀具;
[0006]
抓取系统用于抓放连杆,找正系统用于保证连杆端面平行于拍照识别系统预设平面,刮削系统用于对连杆毛刺刮削,翻转系统用于翻转以便于再次抓取加工另一面。
[0007]
优选的,夹取手爪和定心手爪均为气动手爪。
[0008]
优选的,夹取手爪为两指手爪,定心手爪为三指定心手爪。
[0009]
优选的,机器人为多自由度关节机器人,夹取手爪和定心手爪的手指与连杆接触的表面均设有黄铜贴片。
[0010]
优选的,视觉相机上设有视觉相机补光板,视觉相机上设有集成座,视觉相机和浮动刀具均安装在集成座上。
[0011]
优选的,翻转系统可以对连杆进行180度翻面。
[0012]
优选的,翻转系统设有第一支架,第一支架上设有前进平台和举升平台,举升平台上设有翻转气缸,翻转气缸上设有翻转手爪,翻转系统还设有第二支架,第二支架上设有托盘,托盘上设有推动气缸。
[0013]
本实用新型有益效果是,
[0014]
(1)由于采用了机器人及气动手爪,气动手爪的手指与连杆接触处设有黄铜贴片,既可以摆脱人工搬运的高强度作业,还能避免精加工后的连杆表面被破坏;
[0015]
(2)由于设有找正系统,可以解决上游自动或人工物流线中连杆定位基准不准确,姿态不稳定的问题,机器人第一次抓取后,连杆端面可能不平行于拍照识别系统,机器人将连杆放置于标定好的正位平台,之后二次抓取,保证连杆端面平行于拍照识别系统;
[0016]
(3)拍照识别系统采用视觉相机对连杆需刮削的轮廓进行拍照识别,识别结果用于纠正机器人运行轨迹以得到角度准确、一致性好的倒角;
[0017]
(4)刮削系统采用浮动刀具,机器人携带连杆靠近浮动刀具,机器人将需要刮削的边缘压靠在浮动刀具刃部,刀具被压后倾斜一定角度从而实现特定角度倒角的加工,机器人携带工件相对于刀具运行特定轨迹,从而完成此面边缘的倒角去毛刺加工;
[0018]
(5)翻转系统可以实现连杆的180度翻转,在连杆加工完一个表面后进行翻转,机器人继续抓取连杆进行下一个表面的加工,在多工位翻转平台上机器人还可以直接抓取已经翻转好的连杆进行下一表面加工,无需等待,可以极大的提高加工效率;
[0019]
(7)该装置集成度高,占地面积小,可以适应不同自动化程度的生产线,便于厂家对现有生产线进行改造,改造成本低,毛刺去除效率高,精度好,替代了人工去毛刺的操作,降低劳动强度,可以24小时不停机加工,废品率降低,提高了连杆加工的整体效率,质量得到了保障,可适用于大批量加工。
附图说明
[0020]
图1是本实用新型实施例连杆去毛刺装置布局示意图;
[0021]
图2是本实用新型实施例连杆工件姿态正位动作示意图;
[0022]
图3是本实用新型实施例连杆拍照识别系统动作示意图;
[0023]
图4是本实用新型实施例连杆浮动刀具刮削示意图;
[0024]
图5是本实用新型实施例连杆翻转系统动作示意图。
[0025]
图中符号说明:
[0026]
1.机器人主体;2.两指手爪;3.三指定心手爪;4.正位平台;5.翻转气缸;6.前进平台;7.举升平台;8.翻转手爪;9.推动气缸;10.托盘;11.第一支架;12.第二支架;13.浮动刀具;14.视觉相机补光板;15.视觉相机;16.集成座。
具体实施方式
[0027]
下面结合实施例对本实用新型做进一步描述。
[0028]
如图1所示,一种连杆去毛刺装置,包括抓取系统、找正系统、拍照识别系统、刮削系统和翻转系统;以上系统可以集成在现有的自动化生产线中,安装布局时可以采用将抓取系统设置在中心位置,拍照识别系统和刮削系统安装在一起,找正系统、拍照识别系统
(刮削系统)、翻转系统依次围绕抓取系统安装,方便各工序间的传递操作,可以提高加工效率,也可以根据实际空间布局确定各系统的安装位置,达到节省空间降低改造成本的效果。
[0029]
抓取系统设有机器人本体1,机器人本体1上设有夹取手爪和定心手爪,机器人本体1为多自由度六轴关节机器人。为保护连杆精加工表面,同时达到定位要求,因连杆大头端内孔相对小头端内孔无黄铜轴套,大头端内孔精加工表面更加不易被破坏,所以采用大头端内孔圆柱面作为定位面。
[0030]
机器人本体1前端的夹取手爪为两指手爪2,定心手爪为三指定心手爪3,手指与连杆接触的表面均设有黄铜贴片,三指手定心爪3的手指探入大头端内孔内撑孔内圆柱面,两指手爪2夹紧连杆小头端毛坯外圆面,夹取手爪和定心手爪均为气动手爪,采用机器人手爪抓取连杆既可以摆脱人工搬运的高强度作业,还能避免精加工后的连杆表面被破坏。
[0031]
如图2所示,找正系统设有正位平台4,用于设置工件姿态和高度,可以解决上游自动或人工物流线中连杆定位基准不准确,姿态不稳定的问题,机器人第一次抓取后,连杆端面可能不平行于拍照识别系统,机器人将连杆放置于标定好的正位平台4,之后二次抓取,保证连杆端面平行于拍照识别系统预设平面。
[0032]
如图3所示,拍照识别系统设有视觉相机15,视觉相机15上设有视觉相机补光板14,视觉相机15安装在集成座16上。拍照识别系统采用视觉相机15对连杆需刮削的轮廓进行拍照识别,识别结果用于纠正机器人本体1的运行轨迹以得到角度准确、一致性好的倒角。
[0033]
如图4所示,刮削系统采用浮动刀具13,浮动刀具13安装在集成座16上,机器人携带连杆靠近浮动刀具13,机器人将需要刮削的边缘压靠在浮动刀具13的刃部,刀具被压后倾斜一定角度从而实现特定角度倒角的加工,刀具压紧力由浮动刀具主轴的径向恒力浮动机构进行调整,机器人携带工件相对于刀具运行特定轨迹,从而完成此面边缘的倒角去毛刺加工。
[0034]
如图5所示,翻转系统设有第一支架11,第一支架11上设有前进平台6和举升平台7,举升平台7上设有翻转气缸5,翻转气缸5上设有翻转手爪8,翻转系统还设有第二支架12,第二支架12上设有托盘10,托盘10上设有推动气缸9,翻转系统可以对连杆进行180度翻面,在连杆加工完一个表面后进行翻转,机器人继续抓取连杆进行下一个表面的加工,在多工位翻转平台上机器人还可以直接抓取已经翻转好的连杆进行下一表面加工,无需等待,可以极大的提高加工效率。
[0035]
一种连杆去毛刺方法,步骤为:
[0036]
(1)机器人本体1前端安装两指手爪2和三指定心手爪3,抓取上游生产线的连杆来料;
[0037]
(2)机器人将连杆放置于标定的正位平台4上,然后二次抓取;
[0038]
(3)机器人携带连杆将连杆待加工面正对视觉相机15,使用视觉相机15对连杆需刮削的轮廓进行拍照识别,识别结果用以纠正机器人运行轨迹;
[0039]
(4)拍照结束,机器人携带连杆靠近浮动刀具13,机器人将需要刮削的边缘压靠在浮动刀具13的刃部;
[0040]
(5)机器人携带工件相对于浮动刀具13运行特定加工轨迹,从而完成此面边缘的倒角去毛刺加工;
[0041]
(6)机器人携带连杆将其放置于翻转系统上,翻转系统对连杆进行翻面,使连杆翻转180度,连杆另一未倒角去毛刺的面朝向机器人手爪抓取的对外方向;
[0042]
(7)依次重复步骤(3)和(4),待此连杆两面均加工完成后,机器人携带连杆放入下游物流线或码垛物料托盘,机器人进行下一工作循环。
[0043]
该装置可以实现和替代传统自动化中多轴联动机床和自动工装的精度与效率,并提高刀具轨迹的精准性,同时对工件已精加工的表面起到良好保护。该装置集成度高,占地面积小,可以适应不同自动化程度的生产线,便于厂家对现有生产线进行改造,改造成本低,毛刺去除效率高,精度好,替代了人工去毛刺的操作,降低劳动强度,可以24小时不停机加工,废品率降低,提高了连杆加工的整体效率,质量得到了保障,可适用于大批量加工。
[0044]
惟以上所述者,仅为本实用新型的具体实施例而已,当不能以此限定本实用新型实施的范围,故其等同组件的置换,或依本实用新型专利保护范围所作的等同变化与修改,皆应仍属本实用新型权利要求书涵盖之范畴。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips