
 商标分类
商标分类  商标转让
商标转让 
一种摄像头模组组装机的多功能搬运机械手的制作方法
 2021-01-29 16:01:43|
2021-01-29 16:01:43| 231|
231| 起点商标网
起点商标网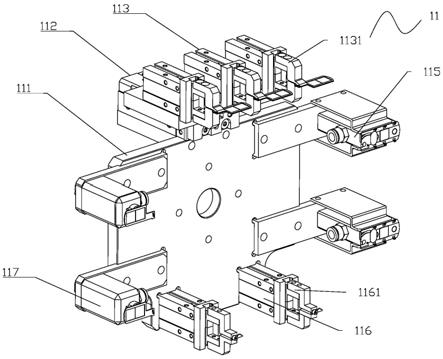
[0001]
本发明涉及摄像头组装技术领域,具体涉及一种摄像头模组组装机的多功能搬运机械手。
背景技术:
[0002]
为满足人们的拍照需求,市面上已存在许多装有前置的摄像头的数码产品,以手机为例,目前手机前置的摄像头组装全程靠人工用镊子取料,然后再用镊子揭掉摄像头镜头上的隔离膜,人眼对准摄像头与屏幕面板上的摄像头安装位置,最后将摄像头组装到屏幕面板上。手机等移动终端发展迅速,功能也越来越多样化,其中,双镜片镜头的出现,大大提高了摄像质量,这种摄像头模组有两个镜片,一个为普通的透镜,另一个为偏光镜,在不同的使用场合切换不同的镜片,以获得较好的摄影质量。摄像头模组主要由底壳、铁片、线圈、摆轴、镜片和上盖组成,其中铁片插入在线圈中,铁片通过螺丝固定在底壳上,线圈驱动摆轴摆动;镜片上设置有两片镜片,摆轴的端部与镜片相配合,带动镜片来回移动,上盖扣合在底壳中。
[0003]
现有的摄像头模组组装设备例如中国专利公开号为cn108857402a、名称为一种摄像头组装设备的专利公开了一种摄像头组装设备,包括机架、底板一、至少一个自动定位治具、转盘装置、上料装置一、用于取摄像头和组装摄像头的机械手装置、揭隔离膜装置、工业相机复检装置和工业相机对位装置,底板一设在机架内,机械手装置固设在机架内部的顶部,转盘装置、上料装置一、揭隔离膜装置、工业相机复检装置均安装在底板上且均设在机械手装置下方,工业相机对位装置设在转盘装置下方,转盘装置设在底板一中间,上料装置一设在转盘装置右侧,揭隔离膜装置设在转盘装置后方。
[0004]
现有技术存在以下不足:1. 组装效率低,多个组装任务移取效率低,镜片需要翻转;2. 线圈铁片组装效率低,姿态易错位;3. 组装工序多,生产速度低,自动化程度低。
技术实现要素:
[0005]
本发明的目的是针对现有技术中组装效率低,多个组装任务移取效率低,镜片需要翻转的问题,提出一种适应多零部件同时搬运,组装高效,便于镜片翻转的摄像头模组组装机的多功能搬运机械手。
[0006]
为本发明之目的,采用以下技术方案:一种摄像头模组组装机的多功能搬运机械手,其包括关节机器人、底板、升降气缸、第一手指气缸、第一吸取块、第二手指气缸和第二吸取块;底板为矩形,底板的中心部位安装在关节机器人的输出端上;底板的四周上有四个工位,分别为镜片夹取工位、上盖吸取工位、摆轴夹取工位和镜片吸取工位;升降气缸对应镜片夹取工位,升降气缸安装在底板上,第一手指气缸通过连接板连接在升降气缸的伸缩端;第一吸取块对应上盖吸取工位,第一吸取块安装在底板的侧方;第二手指气缸对应摆轴夹取工位,第二手指气缸安装在底板上;所述的第二吸取块对应镜片吸取工位,第二吸取块安装在底板上。
[0007]
作为优选,所述的第一手指气缸设置有并排布置的三个,三个第一手指气缸对应镜片料盘中的一排三个镜片同时夹取,第一手指气缸的端部安装有镜片夹块。
[0008]
作为优选,所述的第一吸取块设置有两个。
[0009]
作为优选,所述的第二手指气缸设置有两个,第二手指气缸的移动端设置有摆轴夹块,摆轴夹块的相对侧面设置有与摆轴外轮廓相对应的凹纹。
[0010]
作为优选,所述的第二吸取块设置有两个。
[0011]
一种摄像头模组组装机的多功能搬运方法,关节机器人带动底板在可达空间中移动,首先第二手指气缸将摆轴从料盘中夹出,组装到底壳中;而后第一手指气缸将镜片从镜片料盘中取出,取出后放置到转轴上,将镜片转成平放状态,而后通过第二吸取块吸住,吸住后将镜片进行组装;最后第一吸取块从料盘中将上盖吸住取出,进行最后的扣合组装。
[0012]
一种摄像头模组组装机,其包括机架以及安装在机架上的转动治具装置、铁片上料装置、线圈料盘组件、底壳上料装置、锁紧装置、摆轴料盘组件、镜片料盘组件、上盖上料装置、下料装置、第一搬运机械手和第二搬运机械手;转动治具装置位于机架的中部,转动治具装置上设置有四个工位,分别为第一组装工位、锁紧工位、第二组装工位和下料工位,第一搬运机械手对应第一组装工位,第一搬运机械手衔接铁片上料装置、线圈料盘组件和底壳上料装置;锁紧装置对应锁紧工位;第二搬运机械手对应第二组装工位,第二搬运机械手衔接摆轴料盘组件、镜片料盘组件和上盖上料装置;所述的下料装置对应下料工位;上述的第二搬运机械手采用上述技术方案所述的一种摄像头模组组装机的多功能搬运机械手。
[0013]
作为优选,所述的转动治具装置用于载动摄像头模组的各元件流转,第一搬运机械手用于实现铁片、线圈和底壳之间的组装,并将这三个元件放置在转动治具装置中,锁紧装置用于将铁片固定在底壳中;第二搬运机械手用于将摆轴、镜片和上盖组装到治具中,下料装置用于将成品实现下料。
[0014]
采用上述技术方案的摄像头模组组装机的多功能搬运机械手的优点是:通过在关节机器人的末端设置多个夹取和吸附组件,可适应摆轴,镜片和上盖三个工件的搬运,效率更高,可实现单次搬运多个工件,又同时一起组装,组装效率高;镜片先夹取,在吸附搬运,中间过程实现翻转,便于镜片的组装。
[0015]
采用上述技术方案的摄像头模组组装机的优点是:1. 第一搬运机械手采用机械手夹取上料的方式,具有可达空间广泛的优点,设置有下吸盘和下吸盘,可同时对底壳和线圈进行吸取和夹取,可覆盖多个工位,提高组装的效率;夹指的两侧设置有按压板,可以保持线圈和铁片的姿态,防止在高速搬运移动过程中发生掉落,也能提高装入的准确度。
[0016]
2. 第二搬运机械手通过在关节机器人的末端设置多个夹取和吸附组件,可适应摆轴,镜片和上盖三个工件的搬运,效率更高,可实现单次搬运多个工件,又同时一起组装,组装效率高;镜片先夹取,在吸附搬运,中间过程实现翻转,便于镜片的组装。
附图说明
[0017]
图1为产品的爆炸结构图。
[0018]
图2为转动治具装置的结构图。
[0019]
图3为铁片上料装置的结构图。
[0020]
图4为底壳上料装置的结构图。
[0021]
图5为第一搬运机械手的结构图。
[0022]
图6为锁紧装置的结构图。
[0023]
图7为镜片料盘组件的结构图。
[0024]
图8为第二搬运机械手的结构图。
[0025]
图9为下料装置的结构图。
具体实施方式
[0026]
如图1-9所示,一种摄像头模组组装机包括机架以及安装在机架上的转动治具装置1、铁片上料装置2、线圈料盘组件3、底壳上料装置4、锁紧装置5、摆轴料盘组件6、镜片料盘组件7、上盖上料装置8、下料装置9、第一搬运机械手10和第二搬运机械手11;转动治具装置1位于机架的中部,转动治具装置1上设置有四个工位,分别为第一组装工位、锁紧工位、第二组装工位和下料工位,第一搬运机械手10对应第一组装工位,第一搬运机械手10衔接铁片上料装置2、线圈料盘组件3和底壳上料装置4;锁紧装置5对应锁紧工位;第二搬运机械手11对应第二组装工位,第二搬运机械手11衔接摆轴料盘组件6、镜片料盘组件7和上盖上料装置8;所述的下料装置9对应下料工位。
[0027]
所述的转动治具装置1用于载动摄像头模组的各元件流转,第一搬运机械手10用于实现铁片、线圈和底壳之间的组装,并将这三个元件放置在转动治具装置1中,锁紧装置5用于将铁片固定在底壳中;第二搬运机械手11用于将摆轴、镜片和上盖组装到治具中,下料装置9用于将成品实现下料。上述的第二搬运机械手11即一种摄像头模组组装机的多功能搬运机械手。
[0028]
如图1所示的摄像头模组,由底壳100、铁片200、线圈300、摆轴400、镜片500和上盖600组成,其中铁片200插入在线圈300中,铁片200通过螺丝固定在底壳100上,线圈300驱动摆轴400摆动;镜片500上设置有两片镜片,摆轴400的端部与镜片500相配合,带动镜片500来回移动,上盖600扣合在底壳100中。
[0029]
如图2所示,所述的转动治具装置1包括分割器11、转盘12、治具体13和限位钉14;转盘12安装在分割器11的输出轴上,治具体13均匀安装在转盘12的四个方位,限位钉14固定在治具体13的上表面,治具体13上端面设置有条形槽,一个治具体13上设置有两个加工位,限位钉14挡住工件的两侧方。
[0030]
如图3所示,所述的铁片上料装置2包括铁片料轨22、承接台23、推板24和推料气缸25;铁片料轨22安装在振料器上,铁片料轨22中将铁片有序送出,承接台23通过支板21安装在机架上,承接台23与铁片料轨22的出料端相衔接,承接台23上设置有沉台231,沉台231用于滑动铁片,承接台23上还设置有缺槽232,缺槽232中用于暂时放置线圈;所述的承接台23上还设置有接近传感器,接近传感器对应铁片;推料气缸25水平固定在支板21上,推板24安装在推料气缸25的伸缩端,推板24的推料部位于沉台231中。
[0031]
如图4所示,所述的底壳上料装置4包括底壳料轨41、底座42、接料块43和侧移气缸44;底壳料轨41安装在振料器上,底壳在底壳料轨41中有序送出,底座42固定在机架上,接料块43设置有两个,接料块43上设置有接料槽,接料槽与底壳料轨41的出料端相衔接;接料块43分别安装在侧移气缸44的伸缩端,接料块43位于底座42上方。
[0032]
如图5所示,所述的第一搬运机械手10包括关节机器人、连接座101、下吸盘102、夹取气缸103、第一按压板104、夹指105和第二按压板106;连接座101固定在关节机器人的运动末端,下吸盘102安装在连接座101一侧边的下方,所述的下吸盘102设置有两个;连接座101另一侧边的下方设置有安装板107,夹取气缸103固定在安装板107上,夹指105安装在夹取气缸103的两移动端,夹指105从两侧与线圈相对应;所述的第一按压板104固定在安装板107上,第一按压板104向下与线圈上的立板相对应;所述的第二按压板106安装在夹指105上,第二按压板106向下与线圈中心的铁片相对应。
[0033]
所述的第一搬运机械手10在工作时,关节机器人带动连接座101在可达空间中运动,首先下吸盘102将底壳上料装置4的底壳吸住,将底壳放置到治具中;而后夹取气缸103带动夹指105将线圈从料盘中夹出,夹住的线圈放置在铁片上料装置2的出料端,使铁片插入在线圈的内部,而后夹取气缸103将铁片和线圈的组装体夹住,放置在底壳中。
[0034]
第一搬运机械手10解决了线圈铁片组装效率低,姿态易错位的问题,采用机械手夹取上料的方式,具有可达空间广泛的优点,设置有下吸盘102和下吸盘102,可同时对底壳和线圈进行吸取和夹取,可覆盖多个工位,提高组装的效率;夹指105的两侧设置有按压板,可以保持线圈和铁片的姿态,防止在高速搬运移动过程中发生掉落,也能提高装入的准确度。
[0035]
如图6所示,所述的锁紧装置5包括底架51、螺丝供给机52、二轴搬运机构53、连接板54和锁螺丝枪55;底架51固定在机架上,螺丝供给机52安装在底架51上,螺丝供给机52设置有两个,二轴搬运机构53固定在底架51上,连接板54安装在二轴搬运机构53的移动部,锁螺丝枪55安装在连接板54上,锁螺丝枪55设置有两个,两个锁螺丝枪55的距离与治具体13中的两个工位对应。
[0036]
所述的上盖上料装置8结构与底壳上料装置4结构相同,上盖上料装置8用于将上盖有序振动送出。
[0037]
如图7所示,所述的镜片料盘组件7包括料盘底架71和两个翻转机构,所述的翻转机构包括减速电机72、转轴73和压块74,减速电机72固定在机架上,转轴73安装在减速电机72的输出轴上,转轴73上设置有多个沉槽,压块74固定在转轴73上,压块74的位置与沉槽相对应,压块74与沉槽中空腔中设置镜片;转轴73上共形成有四个空腔。
[0038]
如图8所示,所述的一种摄像头模组组装机的多功能搬运机械手包括关节机器人、底板111、升降气缸112、第一手指气缸113、第一吸取块115、第二手指气缸116和第二吸取块117;底板111为矩形,底板111的中心部位安装在关节机器人的输出端上;底板111的四周上有四个工位,分别为镜片夹取工位、上盖吸取工位、摆轴夹取工位和镜片吸取工位;升降气缸112对应镜片夹取工位,升降气缸112安装在底板111上,第一手指气缸113通过连接板连接在升降气缸112的伸缩端,所述的第一手指气缸113设置有并排布置的三个,三个第一手指气缸113对应镜片料盘中的一排三个镜片同时夹取,第一手指气缸113的端部安装有镜片夹块1131;第一吸取块115对应上盖吸取工位,第一吸取块115安装在底板111的侧方,所述的第一吸取块115设置有两个;第二手指气缸116对应摆轴夹取工位,第二手指气缸116安装在底板111上,所述的第二手指气缸116设置有两个,第二手指气缸116的移动端设置有摆轴夹块1161,摆轴夹块1161的相对侧面设置有与摆轴外轮廓相对应的凹纹;所述的第二吸取块117对应镜片吸取工位,第二吸取块117安装在底板111上,所述的第二吸取块117设置有
两个。
[0039]
所述的一种摄像头模组组装机的多功能搬运机械手在工作时,关节机器人带动底板111在可达空间中移动,首先第二手指气缸116将摆轴从料盘中夹出,组装到底壳中;而后第一手指气缸113将镜片从镜片料盘中取出,取出后放置到转轴73上,将镜片转成平放状态,而后通过第二吸取块117吸住,吸住后将镜片进行组装;最后第一吸取块115从料盘中将上盖吸住取出,进行最后的扣合组装。
[0040]
一种摄像头模组组装机的多功能搬运机械手解决了组装效率低,多个组装任务移取效率低,镜片需要翻转的问题,通过在关节机器人的末端设置多个夹取和吸附组件,可适应摆轴,镜片和上盖三个工件的搬运,效率更高,可实现单次搬运多个工件,又同时一起组装,组装效率高;镜片先夹取,在吸附搬运,中间过程实现翻转,便于镜片的组装。
[0041]
如图9所示,所述的下料装置9包括竖直气缸91、转动气缸92、连接杆93、下料吸盘94和下料皮带组件95,竖直气缸91固定在机架上,转动气缸92安装在竖直气缸91的伸缩端,连接杆93的一端安装在转动气缸92的转动端,下料吸盘94安装在连接杆93的另一端;下料皮带组件95通过电机驱动,带动皮带转动。
[0042]
上述摄像头模组的组装方法,依次通过以下步骤进行加工:s1 第一搬运机械手将底壳搬运到治具中实现上料;s2 第一搬运机械手将线圈夹住,运到铁片上料装置2的出料端,线圈送出后,铁片嵌入在线圈中,机械手将铁片和线圈的组合体夹住后搬运到底壳中实现上料;s3 锁紧装置将螺丝拧入,螺丝将铁片固定在底壳上,从而将线圈也固定住;s4 第二搬运机械手的第二手指气缸116将摆轴夹住,放置在线圈的转动输出部上;s5 第二搬运机械手的第一手指气缸113先从镜片料盘组件7中将镜片夹住取出,而后放置在翻转机构中将镜片翻转,翻转后有第二搬运机械手的第二吸取块117承接吸住,放置在底壳中;s6 第二搬运机械手的第一吸取块115将上盖吸住,盖在底壳中,实现组装。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips