
 商标分类
商标分类  商标转让
商标转让 
作动缸的制作方法
 2021-01-29 15:01:56|
2021-01-29 15:01:56| 377|
377| 起点商标网
起点商标网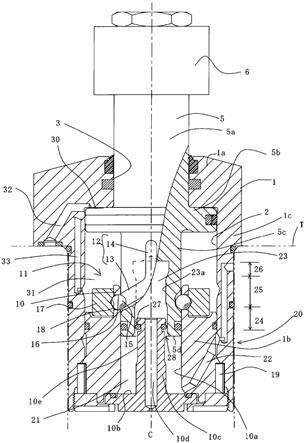
[0001]
本发明涉及作动缸,尤其涉及适用于对夹紧对象物进行固定的夹紧装置等的作动缸。
背景技术:
[0002]
例如在专利文献1、专利文献2中记载有使夹紧臂回旋并且下降而将夹紧对象物固定的回旋式夹紧装置。在该回旋式夹紧装置中,具备夹紧臂的夹紧杆(输出构件)以能够在上下方向上移动且能够绕轴心回旋的方式插入壳体内。在回旋式夹紧装置设置有检测夹紧杆的动作的动作检测装置。在专利文献1的回旋式夹紧装置中,通过相对于夹紧杆的一端部一体地安装操作部,且操作部开闭设置于上下不同的位置的压力流体供给用的入口孔,检测夹紧杆的位置。另外,在专利文献2中,在夹紧杆的一端部设置利用卡合滚珠使夹紧杆的上下移动暂时转换为半径方向的移动,并且使该卡合滚珠的向半径方向的移动转换为阀芯的上下移动的构造。该阀芯使朝向上下方向设置的加压空气通路的开口部开闭。
[0003]
现有技术文献
[0004]
专利文献
[0005]
专利文献1:日本特开2003-305626号公报
[0006]
专利文献2:日本特开2015-20221号公报
技术实现要素:
[0007]
发明所要解决的课题
[0008]
在专利文献1的动作检测装置中,由于在操作部开闭入口孔时操作部在入口孔的开口部周缘滑动,因此在长时间使用的情况下,有可能给关闭入口孔的性能带来影响。另一方面,在专利文献2的动作检测装置中,不像专利文献1那样滑动,而是能够通过阀芯的上下移动来开闭加压空气通路的开口部。但是,阀芯不与夹紧杆一体化,传递夹紧杆的动作的机械要素夹设于中途,因此存在不一定检测夹紧杆的动作本身这样的问题。例如,在专利文献2中,在由于阀芯的破损等而引起阀芯工作不良时,即使夹紧杆正常动作,也误检测为动作异常。
[0009]
本发明的目的在于,直接且准确地检测回旋式夹紧装置的输出构件自身的动作。
[0010]
用于解决课题的技术方案
[0011]
本发明是一种作动缸,其具有输出构件,该输出构件收容于在壳体内设置的作动缸孔,利用压力流体上下可动,其特征在于,该作动缸具有:第一阀室,设置在所述壳体的下壁与所述输出构件之间;第二阀室,使所述输出构件呈挖空状地向所述第一阀室侧开放而形成;以及阀杆,从所述下壁突出并插入到第二阀室,在所述阀杆设置有朝向所述第二阀室开口的阀杆通路,在所述阀杆与所述第二阀室之间且在所述阀杆的外周壁侧或所述第二阀室的内周壁侧设置有密封部,在所述阀杆与所述第二阀室相对移动时,形成于所述第一阀室与所述第二阀室之间的压缩空气流路存在被所述密封部密封的遮蔽区域和相对于密封
开放的开放区域,从所述压缩空气流路的一端供给压缩空气,该压缩空气流路的另一端向外部空气开放。
[0012]
发明效果
[0013]
本发明中使用的动作检测装置如专利文献1所示,相对于输出构件或夹紧杆的一端部一体地设置操作部这一点相同,但构成为尽量避免相对于入口孔的滑动。因此,在长期使用动作检测装置的情况下,能够减轻操作部的外周壁或入口孔的内周壁的磨损,能够长时间维持形成于该操作部与入口孔之间的滑动间隙的尺寸。因此,能够准确地检测夹紧杆的动作。另外,在操作部直接对阀进行开闭这一点上,中途不存在如专利文献2那样的传递夹紧杆的动作的机械要素,能够检测输出构件的动作本身。
附图说明
[0014]
图1是本发明的实施例1的回旋式夹紧装置的剖视图(松开状态)。
[0015]
图2是图1所示的回旋式夹紧装置的局部剖视图(松开状态与夹紧状态之间的中途状态)。
[0016]
图3是图1所示的回旋式夹紧装置的局部剖视图(夹紧状态)。
[0017]
图4表示本发明的实施例2,图4a表示松开状态的夹紧装置的剖视图,图4b表示中途状态的夹紧装置的剖视图,图4c表示夹紧状态的夹紧装置的剖视图。
[0018]
图5表示本发明的实施例3,图5a表示松开状态的夹紧装置的剖视图,图5b表示中途状态的夹紧装置的剖视图,图5c表示夹紧状态的夹紧装置的剖视图。
[0019]
图6表示本发明的实施例4,图6a表示松开状态的夹紧装置的剖视图,图6b表示中途状态的夹紧装置的剖视图,图6c表示夹紧状态的夹紧装置的剖视图。
[0020]
图7表示本发明的实施例5,图7a表示松开状态的夹紧装置的剖视图,图7b表示中途状态的夹紧装置的剖视图,图7c表示夹紧状态的夹紧装置的剖视图。
[0021]
图8表示本发明的实施例6,图8a表示松开状态的夹紧装置的剖视图,图8b表示中途状态的夹紧装置的剖视图,图8c表示夹紧状态的夹紧装置的剖视图。
[0022]
图9是本发明的实施例7的作动缸装置的分解图。
[0023]
图10表示本发明的实施例7,图10a表示上升进入状态的作动缸装置的剖视图,图10b表示中途状态的作动缸装置的剖视图,图10c表示下降退入状态的作动缸装置的剖视图。
[0024]
图11表示本发明的实施例8,图11a表示松开状态的夹紧装置的剖视图,图11b表示夹紧状态的夹紧装置的剖视图。
具体实施方式
[0025]
在本发明中,在输出构件的下侧设置有第一阀室,并设置有沿着轴线将输出构件向第一阀室呈挖空状开放的第二阀室和从第一阀室的下壁突出并插入第二阀室的阀杆。在阀杆设置有一端向第二阀室开放的阀杆通路。通过输出构件的上下移动,阀杆与第二阀室相对移动。这样,在第一阀室与阀杆通路之间形成有供压缩空气通过的压缩空气流路。压缩空气被供给到压缩空气流路的一端侧(第一阀室或者阀杆通路),并从压缩空气流路的另一端侧(阀杆通路或者第一阀室)向外部空气排出。在阀杆与第二阀室之间设置有遮蔽压缩空
气的移动的密封部。以在阀杆与第二阀室相对移动时,存在被该密封部密封的遮蔽区域和相对于密封开放的开放区域的方式形成有阀杆与第二阀室之间的间隙。另外,在本实施方式中,由上述间隙构成压缩空气流路。
[0026]
也可以在相对于密封开放的开放区域中,在阀杆与第二阀室相对移动时的移动的过程中,以在压缩空气通过阀杆与第二阀室之间时产生不同的压力损失的方式设置间隙的截面积不同的区域。
[0027]
另外,也可以相对于被密封的遮蔽区域,设置从第一阀室与阀杆通路连通的旁通路,相对于设置有旁通路的位置的上下的区域,产生基于旁通路的规定的压力损失。
[0028]
另外,在本说明书中,在称为“上”或“下”的情况下,并不表示重力的方向,将输出构件引入壳体的方向称为“下”,将从壳体送出的方向称为“上”。
[0029]
实施例1
[0030]
利用图1至图3对实施例1进行说明。
[0031]
首先,基于图1,首先对回旋式夹紧装置的整体结构进行说明。壳体1通过多个螺栓(未图示)固定于作为固定台的工作台t。壳体1具备上壁(顶端壁)1a、下壁(基端壁)1b、沿上下方向延伸的主体壁1c、以及形成于该主体壁1c的内侧的作动缸孔2。
[0032]
输出构件5的一部分经由形成于壳体1的上壁1a的筒孔3贯穿到壳体1的外侧。输出构件5以能够绕轴线c回旋的方式且能够沿上下方向(轴线c的方向)移动的方式呈密封状插入筒孔3。在该输出构件5的上端部分固定有臂6。
[0033]
输出构件5具有从上侧依次形成的杆本体5a、直径比该杆本体5a大的活塞部5b、和下杆5c。该下杆5c能够滑动地插入构成壳体1的下壁1b的一部分的支承筒10的筒孔(有底的插入孔)10a。
[0034]
遍及输出构件5的下杆5c和支承筒10的筒孔10a的内壁的上部地设置有回旋机构11。该回旋机构11具备引导槽12和滚珠(卡合件)15。引导槽12是将螺旋状的回旋槽13和直进槽14向上相连而构成的。滚珠15插入引导槽12。滚珠15以能够旋转的方式支承于在支承筒10的内壁设置的支承孔16。套筒17绕轴心旋转自如地外嵌。在套筒17的内周面形成有v字状的槽18,滚珠15能够在该v字状的槽18的上下两点上滚动。
[0035]
支承筒10经由沿上下方向延伸的定位销19而被止转于壳体1的主体壁1c,使输出构件5相对于壳体1的周向的位置(相位)一致。
[0036]
在活塞部5b与壳体1的上壁1a之间设置有夹紧室30。另外,在活塞部5b与壳体1的下壁1b之间设置有松开室31。夹紧用的压力流体(压力油、压缩空气等)经由形成于壳体1的上壁1a的给排路32相对于夹紧室30供给排出。另外,松开用的压力流体经由形成于壳体1的主体壁1c的另一给排路33相对于松开室31供给排出。
[0037]
图1所示的回旋式夹紧装置为松开状态。从夹紧室30排出压力流体,经由给排路33向松开室31供给压力流体。输出构件5为上限位置。在向夹紧状态切换时,从松开室31经由给排路33排出压力流体,经由给排路32向夹紧室30供给压力流体。当活塞部5b向下方移动时,输出构件5一边沿着回旋槽13在俯视下向顺时针方向回旋一边下降。接着,输出构件5沿着直行槽14笔直地下降而成为夹紧状态。在将回旋式夹紧装置从夹紧状态向松开状态切换时,若将夹紧室30的压力流体排出,并且向松开室31供给压力流体,则输出构件5笔直地上升,然后回旋。
[0038]
在下壁1b设置有供构成输出构件5的下侧的下杆5c插入的筒孔10a。筒孔10a是具有底部10b的有底的孔。动作检测装置20具备:第一阀室21,设置在筒孔10a的底部10b与下杆5c的下表面5d之间;壳体通路22,设置在下壁1b上,向第一阀室21供给压缩空气;第二阀室23,沿着轴线c向下使杆5c以挖空状开放;阀杆10c,从底部10b突出而插入第二阀室23;以及阀杆通路10d,使阀杆10c的头顶部贯穿第二阀室23而将第二阀室23与外部空气连通。在第一阀室21开口的壳体通路22的开口设置位置优选不与下杆5c的动作干涉的位置。这样,在本实施例中,形成于第一阀室21与阀杆通路10d之间的压缩空气流路的一端侧成为第一阀室21侧。
[0039]
第二阀室23能够根据其内周壁23a的内径从下至上依次分割为第一区域24、第二区域25、第三区域26。第二区域25的直径最小,第三区域26的直径最大。第一区域24具有两者中间的直径。在阀杆10c的头顶部的周围设置有密封部(o形环)27。在阀杆10c与第二阀室23沿着轴线c相对地移动时,密封部27的位置处的阀杆10c的外周壁10e与第二阀室23的内周壁23a之间的间隙(绕轴线c的间隙的截面积、以下简称为“间隙”)发生变化。密封部27相对于轴线c的外周侧比阀杆10c的外周壁10e向半径方向的外侧稍微突出。在第一区域24中,密封部27与第二阀室23的内周壁23a稍微分离。在第二区域25中,密封部27与第二阀室23的内周壁23a接触,发挥对压缩空气进行密封的作用(有效化)。在第三区域26中,密封部27与第二阀室23的内周壁23a分离。与此相对,在第一区域24和第三区域26中,密封部27对压缩空气进行密封的作用被无效化。
[0040]
接着,对动作检测装置20的动作进行说明。从壳体通路22供给的压缩空气被引导至第一阀室21内。在图1的松开状态时,在第一区域24中的密封部27与第二阀室23之间形成有节流路(称为“节流路28”),第一阀室21的压缩空气经由节流路28而被向阀杆通路10d引导。
[0041]
在图2中示出从松开状态向夹紧状态转变时的回旋式夹紧装置。通过下杆5c下降,当密封部27到达第二区域25时,第一阀室21与阀杆通路10d之间的流路被遮断。
[0042]
在图3所示的夹紧状态下,下杆5c进一步下降,密封部27到达第三区域26。此时,在密封部27与第二阀室23之间形成有流路29,壳体流路22的压缩空气通过流路29和阀杆通路10d而向外部排出。在节流路28和流路29中,压缩空气通过的间隙的截面积不同,流路29较大。因此,在经由节流路28的情况和经由流路29的情况下,从壳体通路22到阀杆通路10d的压力损失不同。在本实施例中,在相对于壳体通路22设置压力传感器(未图示)进行检测的情况下,若将密封部27存在于第二区域25时的检测压力设为0.2mpa,则在第一区域24的松开状态下为0.15mpa,在第三区域26的夹紧状态下为0.0mpa(背压是大气压)。通过利用压力传感器检测压力,能够检测输出构件5的位置。
[0043]
在本实施例中,通过将第二阀室23与密封部27接触的第二区域25设置在中间,能够使密封部27从第一区域24向第二区域25、或者从第二区域25向第三区域26移动时的压力传感器的检测值大幅变化。另外,在第二阀室23的高度中途没有开口,密封部27不会在这样的开口滑动,因此对密封部27的密封性能产生的影响小。另外,密封部27仅在夹紧状态变化时仅与第二阀室23的内周壁23a接触,在通常的大部分时间存在于第一区域24或第三区域26,不处于压缩变形的状态,因此密封性能的劣化小。另外,在第一区域24中,输出构件5绕轴线c回旋,但此时密封部27与阀杆10c分离,因此能够防止回旋动作引起的密封部27的磨
损、破损。
[0044]
在上述实施例中,第二阀室23根据其内径从下至上依次分割为第一区域24、第二区域25、第三区域26,但内径的大小也可以采用不同的顺序。例如,如果从下至上依次减小直径,则具有容易进行第二阀室23的加工这样的优点。
[0045]
实施例2
[0046]
图4示出动作检测装置120的其他构成例。
[0047]
动作检测装置120的第二阀室123与实施例1的第二阀室23同样地根据其内径从下至上依次被分割为第一区域124、第二区域125、第三区域126,第二区域125的直径最大,第三区域126的直径最小,第一区域124具有两者中间的直径,在这一点上不同。其他结构与实施例1相同。
[0048]
接着,对动作检测装置120的动作进行说明。在图4a的松开状态时,第一阀室121的压缩空气经由第一区域124中的密封部127与第二阀室123之间的间隙而被向阀杆通路110d引导。如图4b所示,当下杆5c下降,密封部127到达第二区域125时,第一阀室121与阀杆通路110d之间的间隙变大,与第一区域124时相比压力损失降低。
[0049]
在图4c的夹紧状态下,密封部127到达第三区域126,但密封部127与第二阀室123之间的间隙被闭塞。在本实施例中,密封部127的位置为第三区域126时相对于壳体通路22设置的压力传感器(未图示)的检测压力最高,接下来是密封部127存在于第一区域124时。在密封部127处于第二区域125时,压力传感器的检测压力变得最低。在本实施例中,在第二区域125中,密封部127不与第二阀室123的内周壁123a接触,因此能够避免输出构件5在下降过程中受到密封部127滑动的影响。
[0050]
实施例3
[0051]
图5表示实施例3的动作检测装置220的构成例。
[0052]
动作检测装置220的第二阀室223与实施例2的第二阀室123同样地根据其内径从下向上依次分割为第一区域224、第二区域225、第三区域226,第二区域225的直径最大,第三区域226的直径最小,第一区域224具有两者中间的直径。另一方面,阀杆210c由弹性体构成。阀杆210c在头顶部的周围整个一圈具有直径胀大的密封部227,与此前所述的实施例的不同点在于,密封部227不是基于o形环的其他构件。在图5a的松开状态时,第一阀室221的压缩空气经由第一区域224中的密封部227与第二阀室223之间的间隙而被向阀杆通路210d引导。如图5b所示,当下杆5c下降,密封部227到达第二区域225时,第二阀室223的内周壁223a与阀杆210c之间的间隙变大,与第一区域224时相比压力损失降低。
[0053]
在图5c的夹紧状态下,密封部227到达第三区域226,但密封部227与第二阀室223之间的间隙被闭塞。在本实施例中,密封部227的位置为第三区域226时的压力传感器的检测压力最高,在密封部227存在于第一区域224时,为次高。在密封部227位于第二区域225时,压力传感器的检测压力变得最低。
[0054]
实施例4
[0055]
在实施例1中,根据第二阀室23侧的内径从下至上依次分割为第一区域24、第二区域25、第三区域26等,根据阀杆10c的密封部27存在于哪个位置,来使压力损失变化,或者闭塞向阀杆通路10d的连通。在本实施例中,如图6所示,若使阀杆310c侧的外径从下呈3个阶段变化,并分别作为第一区域324、第二区域325、第三区域326,则第二区域325的外径最小,
第三区域326的外径最大,第一区域324具有两者中间的外径。密封部327设置于第二阀室323侧的出口附近的内周壁323a。
[0056]
在图6a的松开状态时,通过第三区域326和密封部327将第一阀室321与第二阀室323之间封闭。如图6b所示,当下杆5c下降,密封部327到达第二区域325时,产生第二阀室323与阀杆310c之间的间隙。
[0057]
在图6c的夹紧状态下,密封部327到达第一区域324。密封部327与阀杆310c之间的间隙比第二区域325窄。在第二区域325的位置,与密封部327的间隙根据与其他路径的关系也可以仅称为流路,称为节流路的是第一区域324。它们的间隙的截面积不同,流路的压力损失比节流路的压力损失小。
[0058]
关于第二阀室323的内周壁323a的形状以及阀杆310c的外周壁310e的形状,也可以对外径进行设计,以使压力损失根据下杆5c的位置而不同,或者将遮断第一阀室321与阀杆通路310d之间的密封部327设置于第二阀室323侧或者阀杆310c侧。
[0059]
实施例5
[0060]
图7表示实施例5的动作检测装置的构成例。
[0061]
上述实施例1是在密封部27的遮蔽无效的区域中,在阀杆10c与第二阀室23相对移动时,以产生压缩空气通过阀杆10c与第二阀室23之间时的不同的压力损失的方式设置间隙的截面积不同的区域的例子,但在本实施例中,是相对于密封部427的遮蔽有效的区域,设置从第一阀室421与阀杆通路410d连通的旁通路40,相对于设置有旁通路40的位置的上下的区域,产生基于旁通路40的规定的压力损失的例子。
[0062]
在本实施例中,阀杆410c根据其外径被分割为第一区域424、第二区域425。第一区域424的外径比第二区域425小,在设置于第二阀室423侧的内周壁423a侧的密封部和阀杆的外周之间产生间隙。
[0063]
在第二区域中,阀杆410c的外周壁与设置于第二阀室423的内周壁423a侧的密封部427抵接。在第二区域的高度中途具有从阀杆410c的外周壁贯穿至阀杆通路410d的旁通路40。
[0064]
在图7a的松开状态时,设置于第二阀室423的内周壁的密封部427位于比第二区域425的旁通路40靠上侧的位置。第一阀室421的压缩空气被密封部427妨碍向第二阀室423侧的进入,但通过旁通路40而被向阀杆通路410d引导。如图7b所示,当下杆5c下降,密封部427到达比旁通路40靠下侧的第二区域425时,无法在第一阀室421与阀杆通路410d之间经由旁通路40连通,第一阀室421与阀杆通路410d之间闭塞。
[0065]
在图7c的夹紧状态下,密封部427到达第一区域424。在第一区域424中,阀杆410c不与密封部427接触,密封部427的密封性能无效化,第一阀室421与第二阀室423经由外周壁410e与内周壁423a之间的间隙连通。而且,由于第二区域425中的阀杆410c的外径比第二阀室423的内径小,因此第一阀室421的压缩空气到达在阀杆410c的头顶开口的阀杆通路410d。此时,通过以使从第一阀室421到达阀杆通路410d的压力损失比通过旁通路40时的压力损失小的方式设定旁通路40的孔径,能够根据压力传感器(未图示)的检测值来区别图7a中的松开状态和图7c中的夹紧状态。
[0066]
在本实施例中,密封部427在旁通路40上滑动,但以旁通路40的孔径比供给压缩空气的开口小为佳,因此很少对密封部427的性能造成影响。另外,密封部427作为弹性体427a
与摩擦系数小的间隔件427b的双重构造,通过在与阀杆410c接触的一侧预先插入间隔件427b,能够进一步降低对作为密封部427的性能的影响。
[0067]
实施例6
[0068]
图8表示实施例6的动作检测装置520的构成例。
[0069]
在实施例6中,沿着轴线c向下使下杆5c呈挖空状开放的鞘室523不具有作为供压缩空气流通的阀室的功能。鞘室523仅插入有阀杆510c,提供压缩空气不会泄漏那样的袋状的空间。另一方面,设置有从第一阀室521与阀杆通路510d连通的旁通路40a、40b。旁通路40a、40b上下设置,是以通过下杆5c的上下移动而以密封部527的位置为界将旁通路40a、40b的全部或一方从与第一阀室521的连通遮断而产生规定的压力损失的例子。
[0070]
在本实施例中,阀杆510c根据旁通路40a、40b的位置而从下向上被分割为第一区域524、第二区域525、第三区域526。第一区域524位于比旁通路40b靠下侧的位置,第二区域525位于旁通路40a与旁通路40b之间,第二区域526位于比旁通路40a靠上侧的位置。旁通路40a、40b从阀杆510c的外周壁贯穿至阀杆通路510d。设置于鞘室523的入口的密封部527遮断第一阀室521与鞘室523的直接的连通。另外,密封部527是弹性体527a和摩擦系数小的间隔件527b的双重构造。
[0071]
在图8a的松开状态时,密封部527位于比旁路40a靠上侧的第三区域526。第一阀室521的压缩空气通过旁通路40a、40b被引导至阀杆通路510d。如图8b所示,若下杆5c下降,密封部527到达第二区域525,则无法在基于旁通路40a的第一阀室521与阀杆通路510d之间连通,成为仅基于旁通路40b的连通状态。
[0072]
在图8c的夹紧状态下,密封部527到达第一区域524。在第一区域524中,旁通路40a、40b均无法在第一阀室521与阀杆通路510d之间连通。通过在阀杆510c的上下设置旁通路40a、40b,使连通第一阀室521与阀杆通路510d的旁通路40a、40b的数量变化,由此使压力损失变化。能够根据压力传感器(未图示)的检测值来区别该压力变化。在本实施例中,旁通路40a、40b为2个,但也可以设置多个。在本实施例中,在阀杆510c的长度方向上设置的阀杆通路510d朝向鞘室523开口,但如果另外存在将鞘室523的空气与外部空气连通的通路,则阀杆通路510d也可以不发挥其作用,因此不需要朝向鞘室523开口。在本实施例中,旁通路40a的截面积与旁通路40b的截面积既可以是相同程度,也可以是不同的截面积。
[0073]
实施例7
[0074]
图9、图10表示实施例7的动作检测装置620的构成例。该实施例7所示的作动缸装置能够应用于推压型作动缸和拉拽型作动缸这两者。在实施例5中,将第一阀室421用作压缩空气的路径,但在本实施例中,压缩空气不经由设置于下壁1b的底部10b与下杆5c的下表面5d之间的空间621(相当于之前的实施例的第一阀室)。在本实施例中,在阀杆50内设置第一阀杆通路53以及第二阀杆通路54这2个系统,使一方为压缩空气的供给侧,另一方为排出侧。
[0075]
在图9中,为了便于说明,示出了将壳体1的下壁1b从上壁1a和主体壁1c分解后的分解图。在将下壁1b与上壁1a和主体壁1c连结时,壳体通路22a与壳体通路22b相连。在构成输出构件5的活塞部5b和杆本体5a上形成有第二阀室623。该第二阀室623能够根据其内径从下至上依次分割为第一区域624、第二区域625、第三区域626。第二区域625的直径较大,第一区域624和第三区域626的直径较小。
[0076]
在从下壁1b突出的阀杆50上同轴地设置有朝向第二阀室623开口的第一阀杆通路53和第二阀杆通路54。第一阀杆通路53朝向第二阀室623的底面623b开口,第二阀杆通路54朝向第二阀室623的内周壁623a开口。阀杆50是在外侧杆52中内插内侧杆51的双重构造,外侧杆52与内侧杆51的间隙构成第二阀杆通路54。内侧杆51的顶端从外侧杆52的包围脱离,以胀大状露出而形成阀杆50的头顶部51a。
[0077]
在阀杆50的头顶部51a的周围,一对密封部(o形环)55、56设置于彼此不同的高度。在密封部55与密封部56之间设置有从第一阀杆通路53朝向上述第二阀室的内周壁623a贯穿的旁通路40c。设置于第二阀室623的入口周围的密封部57与外侧杆52的外周壁610e抵接,将第二阀室623相对于空间621密封。
[0078]
图10表示阀杆50与第二阀室623沿轴线c相对地移动时的动作。在图10a所示的输出构件5的上升进入状态下,密封部55存在于第一区域624的位置,第二阀杆通路54因密封部55的遮断而妨碍向第二阀室623以及第一阀杆通路53侧的连通。在图10b所示的输出构件5的下降中途状态下,当密封部55及密封部56到达第二区域625时,第二阀杆通路54不被密封部55、56遮断而向第二阀室623侧连通。第一阀杆通路53由于向第二阀室623开放,因此处于第一阀杆通路53与第二阀杆通路54连通的状态。
[0079]
在图10c所示的输出构件5的下降退入状态下,密封部56到达第三区域626。在第三区域626中,第二阀杆通路54因密封部56的遮断而妨碍向第二阀室623侧的连通。另一方面,旁通路40c位于密封部55与56之间,未被密封部55遮蔽,因此,第一阀杆通路53与第二阀杆通路54通过旁通路40c在通路被节流的状态下连通。旁通路40c的节流产生规定的压力损失。这样,在第一区域624中形成遮蔽状态,在第二区域625中形成连通状态,在第三区域626中形成节流状态,通过压力传感器(未图示)的检测值来区别该压力变化。
[0080]
在本实施例中,在不设置旁通路的情况下,在上述上升进入状态或下降退入状态时,压缩空气通路被遮断,在其中途成为开放状态。在该情况下,密封构件55、56不是1对,只要仅具备密封构件55、56中的任意1个即可。
[0081]
实施例8
[0082]
图11表示实施例8的动作检测装置720的构成例。
[0083]
在本实施例中,使阀杆710c侧的外径从下呈两阶段地变化,将它们分别设为第一区域724、第二区域725,第一区域724的外径最小,第二区域725的外径最大。密封部727设置于第二阀室723侧的出口附近的内周壁723a。密封部727是弹性体和摩擦系数小的间隔件的双重构造。
[0084]
在图11a的伸长状态时,通过第二区域725和密封部727将第一阀室721与第二阀室723之间封闭。如图11b所示,当下杆5c下降,密封部727到达第一区域724时,产生第二阀室723与阀杆710c之间的间隙。阀杆710c的第二区域725在与第二阀室723之间具有间隙(在图中难以看清,但间隙打开),第一阀室721与第二阀室723之间为连通状态。
[0085]
各实施方式和各变形例能够进一步进行如下变更。
[0086]
在上述实施例中,分别形成于第一阀室21、121、221、321、421、521与阀杆通路10d、110d、210d、310d、410d、510d侧之间的压缩空气流路的一端侧为第一阀室21、121、221、321、421、521侧,但也可以相反。另外,在实施例7中,也可以将第一阀杆通路53、第二阀杆通路54中的任一方设为压缩空气流路的一端侧,将另一方设为另一端侧。在实施例7中,第一阀杆
通路53和第二阀杆通路54同轴地设置,但也可以不是同轴。例如,第一阀杆通路53以及第二阀杆通路54也可以是在阀杆50的内部沿纵向穿孔而成的长孔,另外,这些长孔也可以不平行。
[0087]
在上述实施例中,输出构件5也可以代替在夹紧驱动时在俯视下向顺时针方向回旋,而在该夹紧驱动时在俯视下向逆时针方向回旋。另外,上述输出构件5的回旋角度当然能够设定为例如90度等所希望的角度。
[0088]
另外,输出构件5一体地具有活塞部5b,但如专利文献1所公开的那样,也可以将活塞部5b作为分开的个体,使活塞部5b仅进行上下动作而不追随输出构件5的回旋动作。
[0089]
另外,引导槽12由例示的螺旋状的回旋槽13和直线状的直进槽14构成,但也可以省略直进槽14。并且,示出了向松开室以及夹紧室供给压力流体的复动式,但也可以取而代之为单动式。另外,示出了由压力流体进行的输出构件的驱动,但也可以是电动致动器。此外,当然能够在本领域技术人员能够想到的范围内进行各种变更。
[0090]
在各实施例中,也可以代替在压缩空气进入的一侧(例如壳体通路22侧)设置测定路径中的压力的压力传感器,而在排出压缩空气的一侧(例如阀杆通路10d侧)设置压力传感器。
[0091]
附图标记的说明
[0092]
1 壳体
[0093]
1a 上壁
[0094]
1b 下壁
[0095]
1c 筒壁
[0096]
2 作动缸孔
[0097]
3 筒孔
[0098]
5 输出构件
[0099]
5a 杆体
[0100]
5b 活塞部
[0101]
5c 下杆
[0102]
5d 下表面
[0103]
6 臂
[0104]
10 支承筒
[0105]
10a 筒孔
[0106]
10b 底部
[0107]
10c、110c、210c、310c、410c、510c、710c 阀杆
[0108]
10d、110d、210d、310d、410d、510d 阀杆通路
[0109]
10e、110e、210e、310e、410e、510e、610e 外周壁
[0110]
11 回旋机构
[0111]
12 引导槽
[0112]
13 回旋槽
[0113]
14 直行槽
[0114]
15 滚珠
[0115]
16 支承孔
[0116]
17 套筒
[0117]
18 v字状的槽
[0118]
19 销
[0119]
20、120、220、320、420、520、620、720 运动检测装置
[0120]
21、121、221、321、421、521、721 第一阀室
[0121]
22、22a、22b 壳体通路
[0122]
23、123、223、323、423、623、723 第二阀室
[0123]
23a、123a、223a、323a、423a、523a、623a、723a 内周壁
[0124]
24、124、224、324、424、524、624、724 第一区域
[0125]
25、125、225、325、425、525、625、725 第二区域
[0126]
26、126、226、326、526、626 第三区域
[0127]
27、127、227、327、427、527、727 密封部
[0128]
28 节流路
[0129]
29 流路
[0130]
30 夹紧室
[0131]
31 松开室
[0132]
32、33 给排路
[0133]
40、40a、40b、40c 旁通路
[0134]
50 阀杆
[0135]
51 内侧杆
[0136]
51a 头顶部
[0137]
52 外侧杆
[0138]
53 第一阀杆通路
[0139]
54 第二阀杆通路
[0140]
55、56、57 密封部
[0141]
427a、527a 弹性体
[0142]
427b、527b 间隔件
[0143]
523 鞘室
[0144]
621 空间
[0145]
623a 内周壁
[0146]
623b 底面
[0147]
c 轴线
[0148]
t 工作台
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips