
 商标分类
商标分类  商标转让
商标转让 
变尺度复杂构型桁架组装在轨工装系统的制作方法
 2021-01-29 15:01:11|
2021-01-29 15:01:11| 270|
270| 起点商标网
起点商标网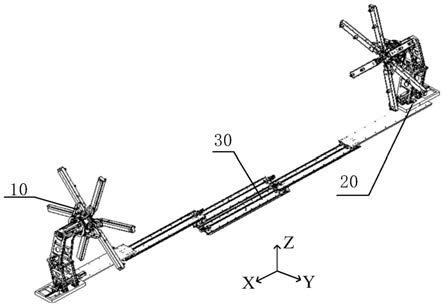
[0001]
本发明属于在轨装配的工装设备领域,具体涉及一种变尺度复杂构型桁架组装在轨工装系统。
背景技术:
[0002]
随着航天技术的发展,大型空间结构的需求不断增加,但由于运载工具所能提供的装载能力有限,对于空间重型或大型结构来说就必须在太空中实施在轨装配。
[0003]
大型空间结构在轨构建方法主要包含可展开结构构建、太空成型结构构建和可直立结构构建三种,其中可直立结构构建因其紧凑的包装能力、可扩展能力和简单的结构等优点而被广泛应用。可直立结构构建又有多种实现方法,目前已提出的大多数搭接方法为将桁架安装在基座上,通过多个小型机器人完成在轨搭接,有效地解决了宇航员手动装配带来的安全性低、效率低和资源消耗高等问题,但当其进行大型复杂结构搭接时,需多次往返取料,使得搭接效率变慢,且控制复杂,目前还难以实现;除此之外,还存在另一种搭接方法是先将多个桁架接头依次固定在基座上,再在接头间连接桁架杆搭接出桁架子单元结构,然后将数个子单元结构进行拼接以实现多种规格的桁架结构的拼接,但目前尚未有该方法的辅助工装设备。因此,设计一种具有大折展比、能够辅助多种复杂构型桁架高精度在轨组装的工装设备,对于满足大型复杂空间结构的装配需求是十分必要的。
技术实现要素:
[0004]
针对以上情况,本发明提供了一种变尺度复杂构型桁架组装在轨工装系统,采用子单元搭接方法,具有大折展比、驱动少、结构紧凑等优点,能够辅助多种复杂构型桁架高精度在轨组装的工装设备。
[0005]
本发明采用的技术方案是,一种变尺度复杂构型桁架组装在轨工装系统,其包括安装平面机构、折叠支撑机构和抽拉底板机构,两个所述折叠支撑机构分别相对安装在所述抽拉底板机构的同一侧的两端,两个所述安装平面机构分别相对安装在两个所述折叠支撑机构的上部内侧,所述安装平面机构包括头部机架、活动支臂、推起支臂和头部固定锁,所述头部机架的第二端安装在所述折叠支撑机构上部内侧,所述头部机架的第一端与所述活动支臂的第一端转动连接,所述推起支臂的第二端与所述头部机架的中部转动连接,所述推起支臂的第一端与所述活动支臂的下侧靠近第一端处转动连接,所述活动支臂的上侧安装有所述头部固定锁,所述头部机架包括前端机架、后端机架和中心驱动组件,所述前端机架和所述中心驱动组件均安装在所述后端机架的第一端,所述后端机架的第二端安装在所述折叠支撑机构上部内侧;所述活动支臂包括外伸缩臂、内固定臂、伸缩直线导轨、头部转动铰链、周向定位锁和驱动组件,所述外伸缩臂经安装于所述内固定臂左右两侧的所述伸缩直线导轨滑动连接,并经安装于所述内固定臂内部的所述驱动组件上,所述头部转动铰链和周向定位锁安装在所述内固定臂的下侧第一端,所述头部转动铰链与所述前端机架滑动连接,所述周向定位锁的安装于所述前端机架的凹槽中;所述推起支臂包括推起支臂
杆、尾部连接铰链、加固连接柱和尾部转轴,两个所述推起支臂杆中部经所述加固连接柱固定在一起,第一端经所述尾部转轴与所述内固定臂的下侧靠近第一端处转动连接,第二端经所述尾部转轴与所述尾部连接铰链转动连接,所述尾部连接铰链固定安装在所述后端机架上;所述头部固定锁包括头部固定锁球节点连接支头、预紧弹簧调整片、头部固定锁外壳、锥形预紧柱、球锁安装盖和头部固定锁锁体,所述头部固定锁锁体第二端与所述外伸缩臂固定连接,内圈与所述头部固定锁外壳导向连接,所述头部固定锁外壳第一端与所述头部固定锁球节点连接支头第二端固定连接,第二端与所述球锁安装盖过盈连接,中部内圈与所述锥形预紧柱导向连接,所述头部固定锁球节点连接支头第一端与桁架接头螺纹连接,第二端与所述预紧弹簧调整片接触,所述预紧弹簧调整片经弹簧与所述锥形预紧柱第一端接触;
[0006]
所述折叠支撑机构包括第一支撑杆、第二支撑杆、前端光轴支撑块、第一连接杆、第三支撑杆、伺服电缸、能旋转底座、底部电缸铰链支座、底部铰链支座、第四支撑杆、第一联动支杆、第二联动支杆、第三联动支杆、第一联动杆、第二联动杆、导向光轴、末端光轴支撑块、第二连接杆、第一支脚杆、下端转轴、折叠直线导轨、电缸推进转接块、支脚杆转轴和支脚杆转轴连接件,所述能旋转底座安装在所述抽拉底板机构的两端,所述伺服电缸经所述底部电缸铰链支座固定连接在所述能旋转底座上方,所述折叠直线导轨固定安装在所述能旋转底座安装上方,所述伺服电缸第一端经所述折叠直线导轨上的所述电缸推进转接块与所述第一支脚杆下端经所述下端转轴转动连接,所述第一支脚杆上端经所述支脚杆转轴连接件与所述支脚杆转轴铰接,所述支脚杆转轴与所述第四支撑杆的中下部转动连接,所述第三支撑杆和第四支撑杆的下部分别与安装在所述能旋转底座安装上方的所述底部铰链支座铰接,所述第三支撑杆经所述第一连接杆与所述第二支撑杆转动连接,所述第四支撑杆经所述第二连接杆与所述第一支撑杆转动连接,所述第一支撑杆的中下部左右内侧分别经所述第一联动支杆与所述第一联动杆、第二联动杆转动连接,所述第四支撑杆的中上部左右内侧分别固定连接有所述第三联动支杆,两个所述第三联动支杆的另一端分别经所述第二联动支杆与所述第一联动杆、第二联动杆转动连接,所述导向光轴第一端经所述前端光轴支撑块与所述第二支撑杆转动连接,第二端分别经所述末端光轴支撑段与所述第一联动杆、第二联动杆转动连接;以及
[0007]
所述抽拉底板机构包括上层底板、中层底板、底层底板和抽拉转盘轴承,所述底层底板上方左右相错均安装有所述中层底板,所述中层底板的外侧上方安装有所述上层底板,所述上层底板的外侧上方安装有所述抽拉转盘轴承,所述抽拉转盘轴承与所述能旋转底座下端转动连接,所述上层底板包括上层底板钢板、转盘轴承固定座、上层加固角钢、上层丝杠连接块和上层滑块固定支座,所述上层底板钢板的第一端上方固定安装有所述转盘轴承固定座,第二端下方中间固定安装有所述上层滑块固定支座,第二端下方两侧对称固定安装有两个所述上层加固角钢,所述上层加固角钢上安装有所述上层丝杠连接块,所述转盘轴承固定座与所述抽拉转盘轴承固定连接,所述上层丝杠连接块固定连接在所述中层底板的第一端;所述中层底板包括中层底板钢板、上部丝杠支撑块、上部丝杠、抽拉中层直线导轨、丝杠固定块、第一同步带轮、第一同步带、电机输出轴、驱动架、弹性联轴器、驱动电机、下部丝杠支撑块、下部丝杠、中层加固角钢、中层丝杠连接块、中层上部滑块固定支座、中层下部滑块固定支座、第二同步带轮和第二同步带,所述中层底板钢板上方安装有两条
平行的所述抽拉中层直线导轨,第一端上方固定安装有所述上部丝杠支撑块,下方固定安装有所述下部丝杠支撑块,第二端上方固定安装有所述驱动架,下方设有所述中层加固角钢,所述驱动电机与所述驱动架固定连接,经所述弹性联轴器与所述电机输出轴固定连接,所述电机输出轴经所述第一同步带与所述第一同步带轮转动连接,经所述第二同步带与所述第二同步带轮转动连接,所述上部丝杠第一端安装在所述上部丝杠支撑块上,第二端经所述丝杠固定块与所述第一同步带轮转动连接,所述下部丝杠第一端安装在所述下部丝杠支撑块上,第二端经所述丝杠固定块与所述第二同步带轮转动连接,所述下部丝杠上设有中层下部滑块固定支座,所述抽拉中层直线导轨的第一端经其上滑块与所述上层丝杠连接块滑动连接,所述中层上部滑块固定支座与所述上层滑块固定支座固定连接,所述中层加固角钢经所述中层丝杠连接块固定连接在所述底层底板的左右交错两端;所述底层底板包括底层底板钢板、丝杠连接块、抽拉底层直线导轨、底层加固角钢和调整支撑腿,所述底层底板钢板上方安装有四条平行的所述抽拉底层直线导轨,上方左右相错安装有所述丝杠连接块,下方设有所述调整支撑腿和所述底层加固角钢,所述抽拉底层直线导轨经其上滑块与所述中层丝杠连接块滑动连接,所述丝杠连接块与所述中层下部滑块固定支座固定连接。
[0008]
可优选的是,所述前端机架包括前端机架架体、前端机架弧形导轨和弧形导轨滑块,所述前端机架架体安装在所述后端机架第一端,所述前端机架弧形导轨安装在所述前端机架架体的第一端,并经所述弧形导轨滑块与所述头部转动铰链滑动连接;所述后端机架包括后端机架架体、后端机架直线导轨、多支臂同步旋转电机、多支臂同步旋转电机支架、整周运动驱动齿轮、转盘轴承、后端机架支撑端盖、后方推进盘丝杠连接件、推进盘导轨支架、弧形导轨滑块、后方推进盘架、翻折滚珠丝杠、翻折驱动后端安装支撑端盖、支撑侧支撑单元、后端机架固定端盖、固定侧支撑单元、翻折驱动后端安装固定端盖、第三同步带轮、第四同步带轮、同步带、翻折驱动电机安装端盖和支臂翻折驱动电机,所述多支臂同步旋转电机经多支臂同步旋转电机支架固定连接在所述后端机架架体的第一端,其输出轴经所述整周运动驱动齿轮与安装在所述后端机架架体第一端所述后端机架支撑端盖上的所述转盘轴承啮齿连接,所述后端机架支撑端盖与所述前端机架架体固定连接,所述支撑侧支撑单元经所述翻折驱动后端安装支撑端盖固定安装在所述后端机架架体第一端,所述固定侧支撑单元经所述后端机架固定端盖固定安装在所述后端机架架体第二端,所述翻折驱动后端安装固定端盖固定安装在所述固定侧支撑单元上,所述支臂翻折驱动电机经所述翻折驱动电机安装端盖固定连接在所述固定侧支撑单元上,其输出轴与所述第三同步带轮固定连接,所述第三同步带轮经所述同步带与所述第四同步带轮转动连接,所述第四同步带轮与所述翻折滚珠丝杠的第二端转动连接,所述翻折滚珠丝杠第一端安装在所述翻折驱动后端安装支撑端盖上,第二端安装在所述翻折驱动后端安装固定端盖上,所述后方推进盘架第二端经后方推进盘丝杠连接件与所述翻折滚珠丝杠上的丝杠螺母固定连接,第二端经所述推进盘导轨支架与安装在所述后端机架架体外圈上所述后端机架直线导轨上的滑块固定连接,第一端经弧形导轨上的所述弧形导轨滑块与所述尾部连接铰链滑动连接;所述中心驱动组件包括活动支臂周转驱动电机、电机支架、活动支臂周向驱动同步带轮、活动支臂周向随动同步带轮、中心驱动组件空心轴、空心轴定位套筒、保护外壳、伸缩臂驱动电机、驱动对接接头、直线模组随动同步带轮、直线模组驱动电机、电机转接法兰桶、活动支臂丝杠驱
动接头、单轴驱动器、单轴驱动器固定板、直线模组驱动同步带和直线模组驱动同步带轮,所述活动支臂周转驱动电机经所述电机支架固定连接在所述后端机架架体第一端,其输出轴与所述活动支臂周向驱动同步带轮固定连接,所述活动支臂周向驱动同步带轮经同步带与所述活动支臂周向随动同步带轮转动连接,所述活动支臂周向随动同步带轮经平键与所述中心驱动组件空心轴固定连接,所述中心驱动组件空心轴通过两个对称的无油衬套安装在所述空心轴定位套筒上,所述单轴驱动器固定板下侧与所述中心驱动组件空心轴上端固定连接,左侧与所述保护外壳固定连接,所述直线模组驱动电机与所述单轴驱动器固定板平行布置,并固定安装在所述保护外壳上,其输出轴与所述直线模组驱动同步带轮固定连接,所述直线模组驱动同步带轮经所述直线模组驱动同步带与所述直线模组随动同步带轮转动连接,所述直线模组随动同步带轮与安装在单轴驱动器固定板内部的所述单轴驱动器转动连接,所述单轴驱动器经其上锥形滑块与所述驱动对接接头滑动连接,所述驱动对接接头经所述电机转接法兰桶与所述伸缩臂驱动电机固定连接,所述活动支臂丝杠驱动接头与所述伸缩臂驱动电机固定连接。
[0009]
可优选的是,所述驱动组件包括伸缩滚珠丝杠、伸缩滚珠丝杠螺母副、锥面锁紧转接法兰、倒锥形压紧环、锁紧螺母、第一轴套、锥形锁紧销、无油衬套和圆柱螺旋压缩弹簧,所述伸缩滚珠丝杠的第一端安装在所述内固定臂的第二端,中部经所述伸缩滚珠丝杠螺母副与所述外伸缩臂滑动连接,第二端经键与所述锥形锁紧销锁紧在所述倒锥形压紧环的内圈,所述锁紧螺母经所述第一轴套锁紧所述锥形锁紧销,所述倒锥形压紧环经所述无油衬套固定安装在所述锥面锁紧转接法兰上,再经所述圆柱螺旋压缩弹簧压紧所述锥面锁紧转接法兰,所述锥面锁紧转接法兰固定安装在所述内固定臂的第一端。
[0010]
可优选的是,所述头部固定锁外壳靠近第二端处设有锥孔,锥孔中设有球型锁珠,球型锁珠外侧受限于所述头部固定锁锁体内圈的阶梯变内径处,内侧限制所述锥形预紧柱第二端。
[0011]
可优选的是,所述外伸缩臂上设有多个所述头部固定锁;所述活动支臂设有多个,且均匀周向布置在所述前端机架的架体的第一端,所述弧形导轨滑块设有与之一一对应的多对,且分别均匀周向布置在所述前端机架弧形导轨和所述后方推进盘架的弧形导轨上。
[0012]
可优选的是,所述驱动架的第一侧设有同步带张紧块,所述同步带张紧块外侧设有同步带张紧螺钉;所述上层丝杠连接块和下层丝杠连接块设有多个且成对设置。
[0013]
可优选的是,所述第一支撑杆、第二支撑杆、第三支撑杆和第四支撑杆为h型结构,所述能旋转底座上的所述第三支撑杆的一侧设有定位销。
[0014]
可优选的是,所述外伸缩臂和所述内固定臂的接触面设为锥面,长度定位完成后通过摩擦锁紧。
[0015]
本发明的特点和有益效果是:
[0016]
1、本发明提供的变尺度复杂构型桁架组装在轨工装系统,其安装平面机构一方面采用极坐标系定位方法,通过控制活动支臂的长度与角度,实现桁架接头在平面内的定位;另一方面采用中心驱动组件的方法,通过驱动对接,实现三个驱动依次带动六个活动支臂达到十二个自由度的定位。
[0017]
2、本发明提供的变尺度复杂构型桁架组装在轨工装系统,其安装平面机构的活动支臂末端利用锥面摩擦,实现在定位完成后的长度位置锁紧,周向定位锁利用扭簧实现周
向位置锁紧,两处锁紧均不需要驱动。
[0018]
3、本发明提供的变尺度复杂构型桁架组装在轨工装系统,其折叠支撑机构采用双平行四杆联动原理,通过单一驱动实现较大尺寸的折展动作。
[0019]
4、本发明提供的变尺度复杂构型桁架组装在轨工装系统,其抽拉底板机构的中层底板通过一个电机控制两个旋向不同的丝杠,同时实现中层相对下层地板的运动与上层底板相对中层底板的运动,两层底板向同一方向展开,减少了驱动数目。
[0020]
5、本发明提供的变尺度复杂构型桁架组装在轨工装系统,具有高精度、大折展比、驱动少、结构紧凑、刚度大等优点,能够胜任多种复杂构型桁架高精度在轨组装工装设备的辅助工作。
附图说明
[0021]
图1为本发明变尺度复杂构型桁架组装在轨工装系统的整体结构展开示意图;
[0022]
图2为本发明的折叠结构收缩示意图;
[0023]
图3为本发明的安装定位平面局部示意图;
[0024]
图4为本发明的头部机架局部示意图;
[0025]
图5为本发明的头部机架架体局部示意图;
[0026]
图6a和6b为本发明的后端机架头部局部示意图;
[0027]
图7a和7b为本发明的后端机架尾部局部示意图;
[0028]
图8为本发明的中心驱动组件局部示意图;
[0029]
图9a和9b为本发明的中心驱动组件剖视图;
[0030]
图10a为本发明的活动支臂局部示意图之一;
[0031]
图10b为本发明的活动支臂局部示意图之二;
[0032]
图11为本发明的推起支臂局部示意图;
[0033]
图12a为本发明的头部固定锁局部示意图之一;
[0034]
图12b为本发明的头部固定锁局部示意图之二;
[0035]
图13为本发明的折叠支撑机构局部示意图;
[0036]
图14为本发明的折叠支撑机构后视图;
[0037]
图15a为本发明的折叠支撑机构第一支撑杆示意图;
[0038]
图15b为本发明的折叠支撑机构第二支撑杆示意图;
[0039]
图15c为本发明的折叠支撑机构第三支撑杆示意图;
[0040]
图15d为本发明的折叠支撑机构第四支撑杆示意图;
[0041]
图16为本发明的折叠支撑机构原理示意图;
[0042]
图17为本发明的抽拉机构局部示意图;
[0043]
图18a为本发明的上层底板局部示意图之一;
[0044]
图18b为本发明的上层底板局部示意图之二;
[0045]
图19为本发明的中层底板局部示意图;
[0046]
图20为本发明的中层底板剖视图;
[0047]
图21a为本发明的底层底板局部示意图之一;以及
[0048]
图21b为本发明的底层底板局部示意图之二;
[0049]
图中:
[0050]
10-安装平面机构;11-活动支臂;111-外伸缩臂;112-内固定臂;113-伸缩直线导轨;114-驱动组件;1141-伸缩滚珠丝杠;1142-伸缩滚珠丝杠螺母副;1143-锥面锁紧转接法兰;1144-倒锥形压紧环;1145-锁紧螺母;1146-第一轴套;1147-锥形锁紧销;1148-无油衬套;1149-圆柱螺旋压缩弹簧;115-头部转动铰链;116-周向定位锁;12-头部固定锁;121-头部固定锁球节点连接支头;122-预紧弹簧调整片;123-头部固定锁外壳;124-锥形预紧柱;125-球型锁珠;126-球锁安装盖;127-头部固定锁锁体;13-推起支臂;131-推起支臂杆;132-尾部连接铰链;133-加固连接柱;134-尾部转轴;14-头部机架;141-前端机架;1411前端机架架体;1412前端机架弧形导轨;1413-弧形导轨滑块;142-后端机架;1421-后端机架架体;1422-后端机架直线导轨;1423-多支臂同步旋转电机;1424-多支臂同步旋转电机支架;1425-整周运动驱动齿轮;1426-转盘轴承;1427-后端机架支撑端盖;1428-后方推进盘丝杠连接件;1429-推进盘导轨支架;14210-后方推进盘架;14211-翻折滚珠丝杠;14212-第三同步带轮;14213-第四同步带轮;14214-翻折驱动后端安装支撑端盖;14215-支撑侧支撑单元;14216-后端机架固定端盖;14217-固定侧支撑单元;14218-翻折驱动后端安装固定端盖;14219-同步带;14220-翻折驱动电机安装端盖;14221-支臂翻折驱动电机;143-中心驱动组件;1431-活动支臂周转驱动电机;1432-电机支架;1433-活动支臂周向驱动同步带轮;1434-活动支臂周向随动同步带轮;1435-中心驱动组件空心轴;1436-空心轴定位套筒;1437-保护外壳;1438-伸缩臂驱动电机;1439-驱动对接接头;14310-直线模组随动同步带轮;14311-直线模组驱动电机;14312-电机转接法兰桶;14313-活动支臂丝杠驱动接头;14314-单轴驱动器;14315-单轴驱动器固定板;14316-直线模组驱动同步带;14317-直线模组驱动同步带轮;20-折叠支撑机构;21-第一支撑杆;22-第二支撑杆;23-前端光轴支撑块;24-第一连接杆;25-第三支撑杆;26-伺服电缸;27-能旋转底座;28-底部电缸铰链支座;29-底部铰链支座;210-第四支撑杆;211-第一联动支杆;212-第二联动支杆;225-第三联动支杆;213-导向光轴;214-末端光轴支撑块;215-第二连接杆;216-第一支脚杆;217-下端转轴;218-折叠直线导轨;219-电缸推进转接块;220-定位销;221-支脚杆转轴;222-支脚杆转轴连接件;223-第一联动杆;224-第二联动杆;30-抽拉底板;31-上层底板;311-上层底板钢板;312-转盘轴承固定座;313-上层加固角钢;314-上层丝杠连接块;315-上层滑块固定支座;32-中层底板;321-中层底板钢板;322-上部丝杠支撑块;323-上部丝杠;324-抽拉中层直线导轨;325-丝杠固定块;326-第一同步带轮;327-第一同步带;328-电机输出轴;329-驱动架;3210-弹性联轴器;3211-驱动电机;3212-同步带张紧块;3213-同步带张紧螺钉;3214-下部丝杠支撑块;3215-下部丝杠;3216-中层加固角钢;3221-中层上部滑块固定支座;3217-中层下部滑块固定支座;3218-第二同步带轮;3219-第二同步带;3220-中层丝杠连接块;33-底层底板;331-底层底板钢板;332-丝杠连接块;333-抽拉底层直线导轨;334-底层加固角钢;335-调整支撑腿;34-抽拉转盘轴承。
具体实施方式
[0051]
为详尽本发明之技术内容、结构特征、所达成目的及功效,以下将结合说明书附图进行详细说明。
[0052]
本发明提供的变尺度复杂构型桁架组装在轨工装系统,如图1和图2所示,其包括
安装平面机构10、折叠支撑机构20和抽拉底板机构30,两个折叠支撑机构20分别相对安装在抽拉底板机构30的同一侧的两端,两个安装平面机构10分别相对安装在两个折叠支撑机构20的上部内侧。
[0053]
如图3所示,安装平面机构10包括头部机架14、活动支臂11、推起支臂13和头部固定锁12,头部机架14的第二端安装在折叠支撑机构20上部内侧,第一端与活动支臂11的第一端转动连接,推起支臂13的第二端与头部机架14的中部转动连接,第一端与活动支臂11的下侧靠近第一端处转动连接,活动支臂11的上侧安装有2个头部固定锁12,活动支臂11设有6个,且均匀周向布置在头部机架14的第一端。
[0054]
如图4所示,头部机架14包括前端机架141、后端机架142和中心驱动组件143,前端机架141和中心驱动组件143均安装在后端机架142的第一端,后端机架142的第二端安装在折叠支撑机构20上部内侧。
[0055]
如图5所示,前端机架141包括前端机架架体1411、前端机架弧形导轨1412和弧形导轨滑块1413,前端机架架体1411安装在后端机架142第一端,前端机架弧形导轨1412安装在前端机架架体1411第一端,并经弧形导轨滑块1413与头部转动铰链115滑动连接,弧形导轨滑块1413设有与活动支臂11一一对应的6个,且均匀周向布置在前端机架弧形导轨1412上。
[0056]
如图6和图7所示,后端机架142包括后端机架架体1421、后端机架直线导轨1422、多支臂同步旋转电机1423、多支臂同步旋转电机支架1424、整周运动驱动齿轮1425、转盘轴承1426、后端机架支撑端盖1427、后方推进盘丝杠连接件1428、推进盘导轨支架1429、弧形导轨滑块1413、后方推进盘架14210、翻折滚珠丝杠14211、翻折驱动后端安装支撑端盖14214、支撑侧支撑单元14215、后端机架固定端盖14216、固定侧支撑单元14217、翻折驱动后端安装固定端盖14218、第三同步带轮14212、第四同步带轮14213、同步带14219、翻折驱动电机安装端盖14220和支臂翻折驱动电机14221,多支臂同步旋转电机1423经多支臂同步旋转电机支架1424固定连接在后端机架架体1421第一端,其输出轴经整周运动驱动齿轮1425与安装在后端机架架体1421第一端后端机架支撑端盖1427上的转盘轴承1426啮齿连接,后端机架支撑端盖1427与前端机架架体1411固定连接,支撑侧支撑单元14215经翻折驱动后端安装支撑端盖14214固定安装在后端机架架体1421第一端,固定侧支撑单元14217经后端机架固定端盖14216固定安装在后端机架架体1421第二端,翻折驱动后端安装固定端盖14218固定安装在固定侧支撑单元14217上,支臂翻折驱动电机14221经翻折驱动电机安装端盖14220固定连接在固定侧支撑单元14217上,其输出轴与第三同步带轮14212固定连接,第三同步带轮14212经同步带14219与第四同步带轮14213转动连接,第四同步带轮14213与翻折滚珠丝杠14211的第二端转动连接,翻折滚珠丝杠14211第一端安装在翻折驱动后端安装支撑端盖14214上,第二端安装在翻折驱动后端安装固定端盖14218上,后方推进盘架14210第二端经后方推进盘丝杠连接件1428与翻折滚珠丝杠14211上的丝杠螺母固定连接,第二端经推进盘导轨支架1429与安装在后端机架架体1421外圈上后端机架直线导轨1422上的滑块固定连接,第一端经弧形导轨上的弧形导轨滑块1413与尾部连接铰链132滑动连接,弧形导轨滑块1413设有与活动支臂11一一对应的6个,且均匀周向布置在后方推进盘架14210的弧形导轨上。
[0057]
如图8和图9所示,中心驱动组件143包括活动支臂周转驱动电机1431、电机支架
1432、活动支臂周向驱动同步带轮1433、活动支臂周向随动同步带轮1434、中心驱动组件空心轴1435、空心轴定位套筒1436、保护外壳1437、伸缩臂驱动电机1438、驱动对接接头1439、直线模组随动同步带轮14310、直线模组驱动电机14311、电机转接法兰桶14312、活动支臂丝杠驱动接头14313、单轴驱动器14314、单轴驱动器固定板14315、直线模组驱动同步带14316和直线模组驱动同步带轮14317,活动支臂周转驱动电机1431经电机支架1432固定连接在后端机架架体1421第一端,其输出轴与活动支臂周向驱动同步带轮1433固定连接,活动支臂周向驱动同步带轮1433经同步带与活动支臂周向随动同步带轮1434转动连接,活动支臂周向随动同步带轮1434经平键与中心驱动组件空心轴1435固定连接,中心驱动组件空心轴1435通过两个对称的无油衬套安装在空心轴定位套筒1436上,单轴驱动器固定板14315下侧与中心驱动组件空心轴1435上端固定连接,左侧与保护外壳1437固定连接,直线模组驱动电机14311与单轴驱动器固定板14315平行布置,并固定安装在保护外壳1437上,其输出轴与直线模组驱动同步带轮14317固定连接,直线模组驱动同步带轮14317经直线模组驱动同步带14316与直线模组随动同步带轮14310转动连接,直线模组随动同步带轮14310与安装在单轴驱动器固定板14315内部的单轴驱动器14314转动连接,单轴驱动器14314经其上锥形滑块与驱动对接接头1439滑动连接,驱动对接接头1439经电机转接法兰桶14312与伸缩臂驱动电机1438固定连接,活动支臂丝杠驱动接头14313与伸缩臂驱动电机1438通过紧定螺钉固定连接。
[0058]
如图10所示,活动支臂11包括外伸缩臂111、内固定臂112、伸缩直线导轨113、头部转动铰链115、周向定位锁116和驱动组件114,外伸缩臂111经安装于内固定臂112左右两侧的伸缩直线导轨113滑动连接,并经安装于内固定臂112内部的驱动组件114伸出或收回,头部转动铰链115和周向定位锁116安装在内固定臂112的下侧第一端,头部转动铰链115与前端机架141滑动连接,周向定位锁116的锁头被扭簧顶起插入到前端机架141的凹槽中,外伸缩臂111和内固定臂112的接触面设为锥面,长度定位完成后通过摩擦锁紧;驱动组件114包括伸缩滚珠丝杠1141、伸缩滚珠丝杠螺母副1142、锥面锁紧转接法兰1143、倒锥形压紧环1144、锁紧螺母1145、第一轴套1146、锥形锁紧销1147、无油衬套1148和圆柱螺旋压缩弹簧1149,伸缩滚珠丝杠1141的第一端安装在内固定臂112的第二端,中部经伸缩滚珠丝杠螺母副1142与外伸缩臂111滑动连接,第二端经键与锥形锁紧销1147锁紧在倒锥形压紧环1144的内圈,锁紧螺母1145经第一轴套1146锁紧锥形锁紧销1147,倒锥形压紧环1144经无油衬套1148固定安装在锥面锁紧转接法兰1143上,再经圆柱螺旋压缩弹簧1149压紧锥面锁紧转接法兰1143,锥面锁紧转接法兰1143固定安装在内固定臂112的第一端。
[0059]
如图11所示,推起支臂13包括推起支臂杆131、尾部连接铰链132、加固连接柱133和尾部转轴134,两个推起支臂杆131中部经加固连接柱133固定在一起,第一端经尾部转轴134与内固定臂112的下侧靠近第一端处转动连接,第二端经尾部转轴134与尾部连接铰链132转动连接,尾部连接铰链132固定安装在后端机架142上。
[0060]
如图12所示,头部固定锁12包括头部固定锁球节点连接支头121、预紧弹簧调整片122、头部固定锁外壳123、锥形预紧柱124、球锁安装盖126和头部固定锁锁体127,头部固定锁锁体127第二端经螺栓与外伸缩臂111固定连接,内圈与头部固定锁外壳123导向连接,头部固定锁外壳123第一端经螺栓与头部固定锁球节点连接支头121固定连接,第二端与球锁安装盖126过盈连接,中部内圈与锥形预紧柱124导向连接,头部固定锁球节点连接支头121
第一端与桁架接头螺纹连接,第二端经螺钉压紧预紧弹簧调整片122,预紧弹簧调整片122经弹簧压紧锥形预紧柱124第一端,头部固定锁外壳123靠近第二端处设有锥孔,锥孔中设有球型锁珠125,球型锁珠125外侧受限于头部固定锁锁体127内圈的阶梯变内径处,内侧限制锥形预紧柱124第二端。
[0061]
如图13、图14、图15和图16所示,折叠支撑机构20包括第一支撑杆21、第二支撑杆22、前端光轴支撑块23、第一连接杆24、第三支撑杆25、伺服电缸26、能旋转底座27、底部电缸铰链支座28、底部铰链支座29、第四支撑杆210、第一联动支杆211、第二联动支杆212、第三联动支杆225、第一联动杆223、第二联动杆224、导向光轴213、末端光轴支撑块214、第二连接杆215、第一支脚杆216、下端转轴217、折叠直线导轨218、电缸推进转接块219、支脚杆转轴221和支脚杆转轴连接件222,能旋转底座27安装在抽拉底板机构30的两端,伺服电缸26经底部电缸铰链支座28固定连接在能旋转底座27上方,折叠直线导轨218固定安装在能旋转底座27安装上方、伺服电缸26第一端,伺服电缸26经折叠直线导轨218上的电缸推进转接块219与第一支脚杆216下端经下端转轴217转动连接,第一支脚杆216上端经支脚杆转轴连接件222与支脚杆转轴221铰接,支脚杆转轴221与第四支撑杆210的中下部转动连接,第三支撑杆25和第四支撑杆210的下部分别与安装在能旋转底座27安装上方的底部铰链支座29铰接,第三支撑杆25经第一连接杆24与第二支撑杆22转动连接,第四支撑杆210经第二连接杆215与第一支撑杆21转动连接,第一支撑杆21的中下部左右内侧分别经第一联动支杆211与第一联动杆223、第二联动杆224转动连接,第四支撑杆210的中上部左右内侧分别固定连接有第三联动支杆225,两个第三联动支杆225的另一端分别经第二联动支杆212与第一联动杆223、第二联动杆224转动连接,导向光轴213第一端经前端光轴支撑块23与第二支撑杆22转动连接,第二端分别经末端光轴支撑段214与第一联动杆223、第二联动杆224转动连接,第一支撑杆21、第二支撑杆22、第三支撑杆25和第四支撑杆210为h型结构,能旋转底座27上的第三支撑杆25的一侧设有定位销220。
[0062]
如图17所示,抽拉底板机构30包括上层底板31、中层底板32、底层底板33和抽拉转盘轴承34,底层底板33上方左右相错均安装有中层底板32,中层底板32的外侧上方安装有上层底板31,上层底板31的外侧上方安装有抽拉转盘轴承34,抽拉转盘轴承34与能旋转底座27转动连接。
[0063]
如图18所示,上层底板31包括上层底板钢板311、转盘轴承固定座312、上层加固角钢313、上层丝杠连接块314和上层滑块固定支座315,上层底板钢板311的第一端上方固定安装有转盘轴承固定座312,第二端下方中间固定安装有上层滑块固定支座315,第二端下方两侧对称固定安装有两个上层加固角钢313,上层加固角钢313上安装有上层丝杠连接块314,转盘轴承固定座312与抽拉转盘轴承34固定连接,上层丝杠连接块314固定连接在中层底板32的第一端,上层丝杠连接块314设有两对。
[0064]
如图19和图20所示,中层底板32包括中层底板钢板321、上部丝杠支撑块322、上部丝杠323、抽拉中层直线导轨324、丝杠固定块325、第一同步带轮326、第一同步带327、电机输出轴328、驱动架329、弹性联轴器3210、驱动电机3211、下部丝杠支撑块3214、下部丝杠3215、中层加固角钢3216、中层丝杠连接块3220、中层上部滑块固定支座3221、中层下部滑块固定支座3217、第二同步带轮3218和第二同步带3219,中层底板钢板321上方安装有两条平行的抽拉中层直线导轨324,第一端上方固定安装有上部丝杠支撑块322,下方固定安装
有下部丝杠支撑块3214,第二端上方固定安装有驱动架329,下方设有中层加固角钢3216,驱动电机3211与驱动架329固定连接,经弹性联轴器3210与电机输出轴328固定连接,电机输出轴328经第一同步带327与第一同步带轮326转动连接,经第二同步带3219与第二同步带轮3218转动连接,上部丝杠323第一端安装在上部丝杠支撑块322上,第二端经丝杠固定块325与第一同步带轮326转动连接,下部丝杠3215第一端安装在下部丝杠支撑块3214上,第二端经丝杠固定块325与第二同步带轮3218转动连接,下部丝杠上设有中层下部滑块固定支座3217,驱动架329的第一侧设有同步带张紧块3212,同步带张紧块3212外侧设有同步带张紧螺钉3213,实现第一同步带327和第二同步带3219的张紧,抽拉中层直线导轨324的第一端经其上滑块与上层丝杠连接块314滑动连接,中层上部滑块固定支座3221与上层滑块固定支座315固定连接,中层加固角钢3216经中层丝杠连接块3220固定连接在底层底板33的左右交错两端,中层丝杠连接块3220设有两对。
[0065]
如图21所示,底层底板33包括底层底板钢板331、丝杠连接块332、抽拉底层直线导轨333、底层加固角钢334和调整支撑腿335,底层底板钢板331上方安装有四条平行的抽拉底层直线导轨333,上方左右相错安装有丝杠连接块332,下方设有调整支撑腿335和底层加固角钢334,抽拉底层直线导轨333经其上滑块与中层丝杠连接块3220滑动连接,丝杠连接块332与中层下部滑块固定支座3217固定连接。
[0066]
本发明的具体操作步骤如下:
[0067]
如图1所示,本发明的变尺度复杂构型桁架组装在轨工装系统,在使用过程中具体包括以下步骤:
[0068]
(1)变尺度复杂构型桁架组装在轨工装系统工作时,
[0069]
a驱动电机3211正转,经电机输出轴328,分别驱动上部丝杠323、下部丝杠3215相同方向旋转,实现两侧上层底板31和中层底板32均向外展开;
[0070]
b伺服电缸26正转,驱动电缸推进转接块219,经下端转轴217,带动第一支脚杆216摆动,再经支脚杆转轴连接件222,带动与支脚杆转轴221连接的第四支撑杆210摆动,进而经第一联动支杆211、第二联动支杆212、第三联动支杆225组成的小平行四边形,带动第一支撑杆21摆动,实现第一支撑杆21、第二支撑杆22、第三支撑杆25和第四支撑杆210组成的大平行四边形的整个折叠支撑机构20的伸展运动;
[0071]
c头部机架13的支臂翻折驱动电机14221正转,驱动翻折滚珠丝杠14211,经后方推进盘丝杠连接件1428,带动后方推进盘架14210沿轴线方向运动伸出,继而带动后方推进盘架14210、推起支臂13和活动支臂11构成的曲柄滑块机构中的连杆推起支臂13运动,实现曲柄活动支臂11的伸展运动;
[0072]
d多支臂同步旋转电机1423正转,驱动整周运动驱动齿轮1425,经和其啮合的转盘轴承1426,带动固定在其上的前端机架141旋转,经安装在前端机架弧形导轨1412上的弧形导轨滑块1413,实现与前端机架141位置相对固定的6个活动支臂11同步旋转;
[0073]
e活动支臂周转驱动电机1431正转,驱动中心驱动组件空心轴1435相对后端机架142旋转,寻找每个活动支臂11的待驱动位置;
[0074]
f当到达待驱动位置后,直线模组驱动电机14311正转,驱动直线模组驱动同步带轮14317,经直线模组驱动同步带14316,带动直线模组随动同步带轮14310,经单轴驱动器14314将对接接头1439向上推进,继而推动1-10-6周向定位锁转动,拔出插入到前端机架架
体1411凹槽中的锁头,解锁活动支臂11周向定位,进行周向定位运动;
[0075]
g同时与活动支臂11末端的驱动接口对接,并推动倒锥形压紧环1144运动,解锁伸缩滚珠丝杠114,伸缩臂驱动电机1438正转,带动已经对接上的伸缩滚珠丝杠114,经伸缩滚珠丝杠螺母副1142带动外伸缩臂111相对内固定臂112向外运动,进行轴向定位运动;
[0076]
h当到达指定位置后,直线模组驱动电机14311反转,经单轴驱动器14314将对接接头1439向下拉回,在弹簧作用下实现活动支臂11的轴向和周向方向的定位锁紧,完成定位运动;
[0077]
i重复e~h的动作,完成六个活动支臂11的定位运动。
[0078]
(2)变尺度复杂构型桁架组装在轨工装系统工作完成后,
[0079]
a活动支臂周转驱动电机1431反转,驱动中心驱动组件空心轴1435相对后端机架142旋转,寻找每个活动支臂11的工作位置;
[0080]
b当到达工作位置后,直线模组驱动电机14311正转,驱动直线模组驱动同步带轮14317,经直线模组驱动同步带14316,带动直线模组随动同步带轮14310,经单轴驱动器14314将对接接头1439向上推进,继而推动1-10-6周向定位锁转动,拔出插入到前端机架架体1411凹槽中的锁头,解锁活动支臂11周向定位,进行周向回零位定位运动;
[0081]
c同时与活动支臂11末端的驱动接口对接,并推动倒锥形压紧环1144运动,解锁伸缩滚珠丝杠114,伸缩臂驱动电机1438反转,带动已经对接上的伸缩滚珠丝杠114,经伸缩滚珠丝杠螺母副1142带动外伸缩臂111相对内固定臂112向内运动,进行轴向回零位定位运动;
[0082]
d当到达指定位置后,直线模组驱动电机14311反转,经单轴驱动器14314将对接接头1439向下拉回,在弹簧作用下实现活动支臂11的轴向和周向方向的定位锁紧,完成回零位定位运动;
[0083]
e重复a~e的动作,完成六个活动支臂11的回零位定位运动;
[0084]
f多支臂同步旋转电机1423反转,驱动整周运动驱动齿轮1425,经和其啮合的转盘轴承1426,带动固定在其上的前端机架141旋转,经安装在前端机架弧形导轨1412上的弧形导轨滑块1413,实现与前端机架141位置相对固定的6个活动支臂11同步旋转,回零位;
[0085]
g头部机架13的支臂翻折驱动电机14221反转,驱动翻折滚珠丝杠14211,经后方推进盘丝杠连接件1428,带动后方推进盘架14210沿轴线方向运动伸出,继而带动后方推进盘架14210、推起支臂13和活动支臂11构成的曲柄滑块机构中的连杆推起支臂13运动,实现曲柄活动支臂11的收合运动;
[0086]
h伺服电缸26反转,驱动电缸推进转接块219,经下端转轴217,带动第一支脚杆216摆动,再经支脚杆转轴连接件222,带动与支脚杆转轴221连接的第四支撑杆210摆动,进而经第一联动支杆211、第二联动支杆212、第三联动支杆225组成的小平行四边形,带动第一支撑杆21摆动,实现第一支撑杆21、第二支撑杆22、第三支撑杆25和第四支撑杆210组成的大平行四边形的整个折叠支撑机构20的收缩运动;
[0087]
i驱动电机3211反转,经电机输出轴328,分别驱动上部丝杠323、下部丝杠3215相同方向旋转,实现两侧上层底板31和中层底板32均向内收回。
[0088]
本发明提供的变尺度复杂构型桁架组装在轨工装系统,其安装平面机构一方面采用极坐标系定位方法,通过控制活动支臂的长度与角度实现桁架接头在平面内的定位,另
一方面采用中心驱动组件的方法,通过驱动对接实现三个驱动依次带动六个活动支臂达到十二个自由度的定位;其活动支臂末端利用锥面摩擦实现长度定位位置锁紧,周向定位锁利用扭簧实现周向位置锁紧,且均不需要驱动;其折叠支撑机构采用双平行四杆联动原理,通过单一驱动实现较大尺寸的折展动作;其抽拉底板机构的中层底板通过一个电机控制两个旋向不同的丝杠,同时实现中层相对下层地板的运动与上层底板相对中层底板的运动;具有高精度、大折展比、驱动少、结构紧凑、刚度大等优点,能够胜任多种复杂构型桁架高精度在轨组装工装设备的辅助工作。
[0089]
以上所述的实施例仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案做出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips