
 商标分类
商标分类  商标转让
商标转让 
一种数控机床焊接用旋转式定位夹持装置的制作方法
 2021-01-29 15:01:18|
2021-01-29 15:01:18| 241|
241| 起点商标网
起点商标网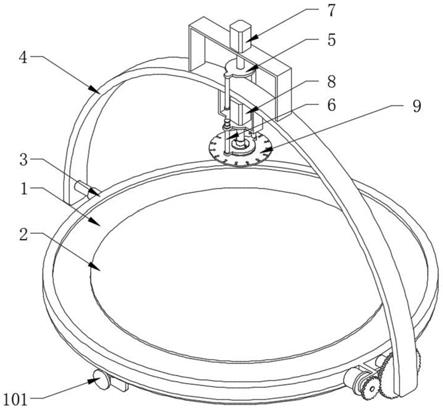
[0001]
本发明涉及数控机床加工技术领域,尤其涉及一种数控机床焊接用旋转式定位夹持装置。
背景技术:
[0002]
数控焊接机床是利用程序控制焊接机械手对零部件进行自动焊接的设备,机械手根据程序移动焊接,由此需要将零部件固定在定位夹持装置上,定位夹持装置常见的是夹紧台。
[0003]
目前,夹紧台的结构为底板,压臂机构,气缸,定位销,弹簧销,支撑柱等组件,压臂机构通常安装在底板上,通常位于零部件的一侧,由此会出现以下问题:1、焊接机械手在自动焊接时,由于压臂机构的阻挡,难以实现连续焊接,而且还会增加编程的难度;2、底板通常为固定结构,零部件整体角度难以调整,导致难以实现多方位焊接;综上或导致出现无法最大化发挥焊接机械手的功能。
[0004]
为此,本发明提供一种数控机床焊接用旋转式定位夹持装置。
技术实现要素:
[0005]
本发明的目的在于:为了解决背景技术中提到的问题,而提出的一种数控机床焊接用旋转式定位夹持装置。
[0006]
为了实现上述目的,本发明采用了如下技术方案:
[0007]
一种数控机床焊接用旋转式定位夹持装置,包括环形固定板、圆形定位板、环形承载套、半圆吊板、上门型推杆、下门型推杆、上气缸、下气缸和压臂盘组合,所述圆形定位板设置在环形固定板环形孔内,所述环形承载套转动连接在环形固定板的外周边,所述环形固定板的底部固定设置有驱动机构一,该驱动机构一和环形承载套配合使用,所述半圆吊板连接在环形承载套的外部且其连接轴线穿过半圆吊板和环形承载套的圆心,该半圆吊板位于圆形定位板的上部,所述半圆吊板的内表壁通过下槽型架和下气缸固定连接,所述下气缸的活塞轴轴线和圆形定位板同轴心分布,所述压臂盘组合转动连接在下气缸上活塞轴的底部,所述下门型推杆上的两个导杆的自由端从下槽型架底部贯穿且为轴向滑动配合,该下门型推杆的底部和压臂盘组合连接,所述半圆吊板的外表壁通过上槽型架和上气缸固定连接,所述上门型推杆上的两个导杆的自由端和下门型推杆上的两个导杆的自由端相对,该上门型推杆的顶部和上气缸上的活塞轴底部固定连接,上气缸和下气缸回程,所述压臂盘组合相对半圆吊板固定,上气缸和下气缸推程,所述压臂盘组合相对半圆吊板转动配合。
[0008]
作为上述技术方案的进一步描述:
[0009]
所述压臂盘组合包括下压臂固定板、上压臂固定板和复位弹簧,所述上压臂固定板位于下压臂固定板的上部且为上下滑动配合,所述下压臂固定板的上端面固定设置有顶部间隙贯穿上压臂固定板并和下气缸的活塞轴连接的连接柱,所述复位弹簧套设在连接柱
上且位于下压臂固定板和上压臂固定板之间,所述连接柱的外周边固定设置有位于上压臂固定板上部的限位板,所述下门型推杆上的底板间隙贯穿连接柱且位于限位板和上压臂固定板之间,上压臂固定板向下压臂固定板滑动,下压臂固定板相对下气缸的活塞轴转动配合。
[0010]
作为上述技术方案的进一步描述:
[0011]
所述下门型推杆上的底板的上端面固定设置还有对称分布的锥形限位轴,所述限位板上的下端面开设有和锥形限位轴对应的限位孔。
[0012]
作为上述技术方案的进一步描述:
[0013]
所述圆形定位板的上端面中心位置固定设置有导向轴,所述下压臂固定板的底部开设有和导向轴轴向滑动配合的导向孔,所述,所述环形承载套的外表壁固定设置驱动机构二,所述半圆吊板的内表壁固定设置有和环形固定板转动配合的驱动轴,所述驱动机构二和驱动轴配合使用,所述圆形定位板的外周边和环形固定板球铰且转动配合。
[0014]
作为上述技术方案的进一步描述:
[0015]
所述驱动机构二包括驱动电机二和驱动齿轮,所述驱动轴上固定套设有和驱动齿轮啮合配合的从动齿轮,所述环形承载套的外表壁固定设置有l型板。
[0016]
作为上述技术方案的进一步描述:
[0017]
所述圆形定位板的下表壁固定设置有插杆组合,所述环形固定板的下端面固定设置有插板。
[0018]
作为上述技术方案的进一步描述:
[0019]
所述下压臂固定板的上端面固定设置有导向内套,所述上压臂固定板的下端面固定设置有套设在导向内套外部的导向外套。
[0020]
作为上述技术方案的进一步描述:
[0021]
所述驱动机构一包括驱动电机一和锥齿轮,所述环形承载套的下端面固定连接有锥齿圈,所述环形固定板的下端面固定设置有安装板二。
[0022]
综上所述,由于采用了上述技术方案,本发明的有益效果是:
[0023]
1、本发明中,设置环形固定板、圆形定位板、环形承载套、半圆吊板、上门型推杆、下门型推杆、上气缸、下气缸和压臂盘组合,上门型推杆的顶部和上气缸上的活塞轴底部固定连接,上气缸和下气缸回程,压臂盘组合相对半圆吊板固定,上气缸和下气缸推程,压臂盘组合相对半圆吊板转动配合,由此实现对零部件上部夹紧,半圆吊板起到支撑上气缸、下气缸和压臂盘组合组合的功能,半圆吊板旋转不影响压臂盘组合对工件夹紧的作用,而且半圆吊板旋转可以实现焊接机械手无阻碍焊接。
[0024]
2、本发明中,圆形定位板的上端面中心位置固定设置有导向轴,下压臂固定板的底部开设有和导向轴轴向滑动配合的导向孔,环形承载套的外表壁固定设置驱动机构二,半圆吊板的内表壁固定设置有和环形固定板转动配合的驱动轴,驱动机构二和驱动轴配合使用,圆形定位板的外周边和环形固定板1球铰且转动配合,由此便于调整零部件放置的角度,进而有利于零部件多方位焊接。
[0025]
3、本发明中,压臂盘组合包括下压臂固定板、上压臂固定板和复位弹簧,半圆吊板的外表壁通过上槽型架和上气缸固定连接,上门型推杆上的两个导杆的自由端和下门型推杆上的两个导杆的自由端相对,该上门型推杆的顶部和上气缸7上的活塞轴底部固定连接,
下压臂固定板的上端面固定设置有顶部间隙贯穿上压臂固定板并和下气缸的活塞轴连接的连接柱,下门型推杆上的底板的上端面固定设置还有对称分布的锥形限位轴,限位板上的下端面开设有和锥形限位轴对应的限位孔,由此便于实现下压臂固定板和上压臂固定板顺序夹紧动作,提高夹紧精度。
附图说明
[0026]
图1为本发明提出的一种数控机床焊接用旋转式定位夹持装置的各主要部件装配的结构示意图;
[0027]
图2为本发明提出的一种数控机床焊接用旋转式定位夹持装置的图1仰视图的结构示意图;
[0028]
图3为本发明提出的一种数控机床焊接用旋转式定位夹持装置的半圆吊板和压臂盘组合配合的结构示意图;
[0029]
图4为本发明提出的一种数控机床焊接用旋转式定位夹持装置的图3仰视的结构示意图;
[0030]
图5为本发明提出的一种数控机床焊接用旋转式定位夹持装置的图1增设导向轴的结构示意图。
[0031]
图例说明:
[0032]
1、环形固定板;11、插板;12、安装板二;2、圆形定位板;21、导向轴;22、插杆组合;3、环形承载套;31、锥齿圈;32、l型板;4、半圆吊板;41、下槽型架;42、上槽型架;43、驱动轴;431、从动齿轮;5、上门型推杆;6、下门型推杆;61、锥形限位轴;7、上气缸;8、下气缸;9、压臂盘组合;91、下压臂固定板;911、连接柱;9111、限位板;91111、限位孔;912、导向孔;913、导向内套;92、上压臂固定板;921、导向外套;93、复位弹簧;101、驱动机构一;1011、驱动电机一;1012、锥齿轮;102、驱动机构二;1021、驱动电机二;1022、驱动齿轮。
具体实施方式
[0033]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本发明保护的范围。
[0034]
实施例1
[0035]
请参阅图1-4,一种数控机床焊接用旋转式定位夹持装置,包括环形固定板1、圆形定位板2、环形承载套3、半圆吊板4、上门型推杆5、下门型推杆6、上气缸7、下气缸8和压臂盘组合9,圆形定位板2设置在环形固定板1环形孔内起到定位零部件的作用,可以在圆形定位板2开设销孔,用来安装定位销和支撑销;环形承载套3转动连接在环形固定板1的外周边,环形固定板1的底部固定设置有驱动机构一101,该驱动机构一101和环形承载套3配合使用,驱动机构一101包括驱动电机一1011和锥齿轮1012,环形固定板1的下端面固定连接有锥齿圈31,环形承载套3的下端面固定设置有安装板二12,驱动电机一1011安装在安装板二12上,锥齿轮1012固定安装在驱动电机一1011的输出轴上并和锥齿圈31啮合,由此可以实现自动化控制环形承载套3相对环形固定板1转动;半圆吊板4连接在环形承载套3的外部且
其连接轴线穿过半圆吊板4和环形承载套3的圆心,该半圆吊板4位于圆形定位板2的上部,半圆吊板4的内表壁通过下槽型架41和下气缸8固定连接,下气缸8的活塞轴轴线和圆形定位板2同轴心分布,由此当半圆吊板4跟随环形承载套3旋转时,下气缸8的轴线始终和圆形定位板2的轴线重合,压臂盘组合9转动连接在下气缸8上活塞轴的底部,下气缸8控制压臂盘组合9动作,压臂盘组合9的作用是对圆形定位板2上的零部件夹紧限位,下门型推杆6上的两个导杆的自由端从下槽型架41底部贯穿且为轴向滑动配合,该下门型推杆6的底部和压臂盘组合9连接,半圆吊板4的外表壁通过上槽型架42和上气缸7固定连接,上门型推杆5上的两个导杆的自由端和下门型推杆6上的两个导杆的自由端相对,该上门型推杆5的顶部和上气缸7上的活塞轴底部固定连接,由此上气缸7动作时通过上门型推杆5来控制下门型推杆6轴向滑动动作,下门型推杆6的作用是控制压臂盘组合9内的部分部件动作,当上气缸7和下气缸8回程时,此时零部件处于自由度不为零的状态,压臂盘组合9相对半圆吊板4固定,当上气缸7和下气缸8推程时,此时处于夹紧零部件状态,压臂盘组合9相对半圆吊板4转动配合,具体的是压臂盘组合9包括下压臂固定板91、上压臂固定板92和复位弹簧93,上压臂固定板92位于下压臂固定板91的上部且为上下滑动配合,具体的是下压臂固定板91的上端面固定设置有导向内套913,上压臂固定板92的下端面固定设置有套设在导向内套913外部的导向外套921,下压臂固定板91的上端面固定设置有顶部间隙贯穿上压臂固定板92并和下气缸8的活塞轴连接的连接柱911,复位弹簧93套设在连接柱911上且位于下压臂固定板91和上压臂固定板92之间,连接柱911的外周边固定设置有位于上压臂固定板92上部的限位板9111,下门型推杆6上的底板间隙贯穿连接柱911且位于限位板9111和上压臂固定板92之间,由此当上压臂固定板92向下压臂固定板91滑动时,下压臂固定板91相对下气缸8的活塞轴转动配合,具体的是下门型推杆6上的底板的上端面固定设置还有对称分布的锥形限位轴61,限位板9111上的下端面开设有和锥形限位轴61对应的限位孔91111,上压臂固定板92向下运动时,锥形限位轴61脱离限位孔91111,下压臂固定板91可以相对下气缸8的活塞轴转动,反之锥形限位轴61插入限位孔91111后,下压臂固定板91相对下气缸8固定,下压臂固定板91和上压臂固定板92上可以开设连接孔,均用于安装不同规格的压臂,下压臂固定板91通过压臂对主要零部件(基准件)进行夹紧,上压臂固定板92通过压臂用于对其他零部件夹紧。
[0036]
实施例2
[0037]
请参阅图2、图4和图5,和实施例1的区别为圆形定位板2的上端面中心位置固定设置有导向轴21,下压臂固定板91的底部开设有和导向轴21轴向滑动配合的导向孔912,环形承载套3的外表壁固定设置驱动机构二102,半圆吊板4的内表壁固定设置有和环形固定板1转动配合的驱动轴43,驱动机构二102和驱动轴43配合使用,具体的是驱动机构二102包括驱动电机二1021和驱动齿轮1022,驱动轴43上固定套设有和驱动齿轮1022啮合配合的从动齿轮431,环形承载套3的外表壁固定设置有l型板32,l型板32用来安装驱动电机二1021,圆形定位板2的外周边和环形固定板1球铰且转动配合,可以在环形固定板1的内孔壁安装可以承载径向和周向的轴承,然后此轴承内圈做成球铰内面,圆形定位板2的外周边做成球铰外球面,圆形定位板2的下表壁固定设置有插杆组合22,环形固定板1的下端面固定设置有插板11,插杆组合22为插销结构,插板11为带有插孔的定位板,通过控制插杆组合22和插板11分离可以控制环形固定板1相对环形固定板1球铰运动;当实施例1中压臂盘组合9对零部
件夹紧后,通过控制驱动电机二1021旋转可以控制半圆吊板4相对环形承载套3摆动,进而圆形定位板2跟随摆动,由此便于调整零部件放置的角度,进而有利于零部件多方位焊接。
[0038]
工作原理:使用前,将驱动电机一1011和驱动电机二1021电性连接外部的控制电箱,由控制电箱提供电能和控制命令,然后将上气缸7和下气缸8通过管路连接外部的气源,然后电性连接控制电箱,在环形固定板的下端面可以通过立柱连接座板,座板用于和机床工作台连接;使用时将零部件放置在圆形定位板2上,并通过圆形定位板2上的定位销和支撑销进行支撑和定位,然后控制下气缸8推程,带动下压臂固定板91向下运动并通过其上的压臂挤压部分待焊接的基准零部件,然后控制上气缸7推程,其推动上门型推杆5向下运动并推动下门型推杆6向下运动,此时复位弹簧93压缩,锥形限位轴61脱离限位孔91111,由此半圆吊板4可以相对圆形定位板2转动,此时数控机床上的焊接机械手在从侧面环绕焊接的过程中可以控制半圆吊板4联动旋转,来实现无阻碍焊接。
[0039]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 数控机床

 热门咨询
热门咨询




tips