
 商标分类
商标分类  商标转让
商标转让 
一种银片自动焊接、检测和圆环自动装配设备的制作方法
 2021-01-29 15:01:45|
2021-01-29 15:01:45| 289|
289| 起点商标网
起点商标网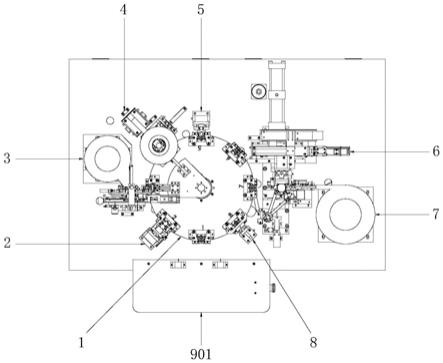
[0001]
本发明涉及一种自动生产技术领域,具体涉及一种银片自动焊接、检测和圆环自动装配设备。
背景技术:
[0002]
随着自动化技术的发展,为了提高产能和产品品质,自动化生产逐步的在取代人工作业。而且随着新能源技术的广泛应用,电池连接片组件以其优越的电气性能和安全性能慢慢的取代了连接电线,电池连接片组件一般在使用前都会在其电气连接端口焊接有用于电性接触和连接的银片或者圆环,现有带有银片和圆环的电池连接片组件在加工时,经常采用的是人工上银片和人工装配圆环,生产效率不高,而且因为银片较小较薄,人工上料时位置容易偏置,导致后期产品品质难以保证。
技术实现要素:
[0003]
本发明解决的技术问题是提供一种银片的自动上料和焊接、银点检测、圆环的自动上料和装配、自动下料的设备。
[0004]
本发明解决其技术问题所采用的技术方案是:
[0005]
一种银片自动焊接、检测和圆环自动装配设备,包括:
[0006]
分度盘机构,所述分度盘机构上规则设置有用于装载待加工产品的若干载具、并对应形成若干工位,所述若干载具经动力装置驱动在所述若干工位中依次切换;
[0007]
围绕所述分度盘机构的若干工位分别布置有产品检测机构、银片装配工站、银片焊接机构、银点检测机构、搬运转移机构、圆环装配工站和载具校正机构;
[0008]
用于固定上述机构机架电控箱,所述机架电控箱上还设置有用于承载和固定主机的机架和用于保护的外壳、内部集成电源控制系统和气源控制系统;
[0009]
所述分度盘机构将所述待加工产品依次切换至所述产品检测机构处检测所述载具中是否有产品,切换至所述银片装配工站处将银片装配到所述待加工产品上,切换至银片焊接机构处将所述银片与所述待加工产品进行焊接形成银点,切换至所述银点检测机构处检测是否有所述银点,切换至所述搬运转移机构处、经所述搬运转移机构将所述待加工产品搬运至所述圆环装配工站处进行圆环的装配,所述分度盘机构再次切换,所述载具校正机构对取走待加工产品的所述载具进行校正等待下一次的装载。
[0010]
进一步地,所述产品检测机构用于检测所述载具中是否装有所述待加工产品,包括产品检测第一动力装置、产品检测头、产品固定组件和产品检测第二动力装置,所述产品固定组件包括滑动基板和固定在其底端的压块,所述滑动基板上固定有所述产品检测第一动力装置,所述产品检测第一动力装置驱动所述产品检测头垂直运动,向下运动时压覆所述载具中的待加工产品,通过位移距离判断所述载具中是否有所述待加工产品,所述产品检测第二动力装置驱动所述基板从而带动所述产品检测第一动力装置和所述压块同步垂直运动,向下运动时固定所述载具开始检测所述载具中是否有所述待加工产品。
[0011]
进一步地,所述银片装配工站用于向所述待加工产品上装配银片,包括银片第一动力装置、银片第二动力装置、银片第三动力装置、银片吸嘴组件、银片振动盘组件、银片校正组件、产品支撑组件和第一固定机构;所述银片振动盘组件用于银片的传送上料,所述银片第一动力装置倾斜驱动所述银片吸嘴组件垂直运动、向下吸取所述银片振动盘组件取料处的银片,所述银片第二动力装置驱动所述银片第一动力装置前后摆动,向前垂直摆正下料、向后倾斜辅助上料;所述银片第三动力装置驱动所述银片第二动力装置和所述银片第一动力装置同步水平运动、将银片从所述银片振动盘组件处搬运到所述载具处,所述在搬运过程中经所述银片校正组件对所述银片进行方向校正;所述产品支撑组件经动力装置驱动支撑所述待加工产品的底端,所述第一固定机构经动力装置驱动固定所述待加工产品。
[0012]
进一步地,所述银片焊接机构用于将银片焊接至所述待加工产品上,包括焊接动力装置、上电极、下电极、吸尘罩和焊接主机,所述焊接动力装置驱动所述上电极和所述下电极同步垂直运动,向上运动时所述下电极接触所述待加工产品下表面、所述上电极经动力装置驱动下压所述待加工产品上端的银片进行电阻焊,所述吸尘罩抽走焊接时所产生的烟雾和灰层,所述焊接主机固定在所述机架上。
[0013]
进一步地,所述银点检测机构通过位移检测所述待加工产品和银片的焊接情况,包括银点检测第一动力装置、银点检测头组件、银点检测第二动力装置和第二支撑组件,所述银点检测第二动力装置驱动所述第二支撑组件垂直运动、向上运动时支撑所述待加工产品的下表面,所述银点检测第一动力装置驱动所述银点检测头组件垂直运动、向下运动时通过所述银点检测头组件的位移信息判定所述待加工产品和银片的焊接情况。
[0014]
进一步地,所述搬运转移机构用于将焊接好的待加工产品从所述载具中搬运至所述圆环装配工站中,包括搬运垂直动力装置、搬运水平动力装置、搬运机械手组件,所述搬运垂直动力装置驱动所述搬运机械手组件垂直运动、对所述待加工产品抓取和装载,所述搬运水平动力装置驱动所述搬运垂直动力装置带动所述搬运机械手组件同步水平运动、实现所述待加工产品的搬运。
[0015]
进一步地,所述圆环装配工站用于将圆环装配到所述待加工产品上,包括圆环振动盘、圆环流道组件、圆环助推组件、装配工作台、产品固定组件、圆环装配机械手、产品搬运机械手和分料组件,所述圆环振动盘将所述圆环传送到所述圆环流道组件中进行传送上料,所述圆环流道组件包括缓冲组件,所述缓冲组件用于检测所述圆环流道组件中的圆环位置、并通过所述位置控制所述圆环振动盘的上料速度;所述搬运转移机构将所述待加工产品搬运至所述装配工作台中,所述圆环助推组件将所述圆环流道组件中传送过来的圆环推至所述装配工作台中等待装配;所述产品固定组件固定所述装配工作台中的待加工产品,所述圆环装配机械手由动力装置驱动将所述装配工作台中的圆环装配到所述待加工产品上,所述产品搬运机械手将加工好的产品搬运至所述分料组件中进行下料。
[0016]
进一步地,所述载具校正机构用于对取走所述待加工产品的空载具进行位置校正、等待下一次的装载,包括校正针,所述校正针由动力装置驱动垂直运动、并插入到所述载具中对所述载具进行位置校正。
[0017]
进一步地,所述机壳上设置有操控面板和报警器、前端设置有安全光栅。
[0018]
进一步地,所述机架电控箱上设置有用于上料和作业的上料工作台。
[0019]
本发明的有益效果是:
[0020]
1.通过银片的自动上料、自动焊接、银点检测、圆环的自动上料、装配和产品的自动下料,实现了电池连接片的自动生成,提高产品和产品品质。而且将各个生成机构合理布置在分度盘四周,有效的降低设备对场地的要求和限制。
[0021]
2.在银片自动上料前通过设置产品检测机构,从而后期的误操作。而且在圆环自动装配机构后续还设置有载具校正机构,从而校正载具的位置,为下一次的自动化生产做准备。
附图说明
[0022]
图1为本发明的俯视图;
[0023]
图2为图1的立体结构图;
[0024]
图3为本发明的第二立体结构图;
[0025]
图4为本发明的第三立体结构图;
[0026]
图5为图1中标记为1的俯视图;
[0027]
图6为图1中标记为2的立体结构图;
[0028]
图7为图1中标记为3的立体结构图;
[0029]
图8为图1中标记为4的立体结构图;
[0030]
图9为图1中标记为5的立体结构图;
[0031]
图10为图1中标记为6的立体结构图;
[0032]
图11为图1中标记为7的立体结构图;
[0033]
图12为图1中标记为8的立体结构图;
[0034]
图13为本发明的一实施例加工产品立体结构图;
[0035]
图中标记为:
[0036]
1、分度盘机构,101、载具,102、第一固定机构,103、第二固定机构;
[0037]
2、产品检测机构,201、产品检测第一动力装置,202、产品检测头,203、产品固定组件,204、产品检测第二动力装置;
[0038]
3、银片装配工站,301、银片第一动力装置,302、银片第二动力装置,303、银片第三动力装置,304、银片吸嘴组件,305、银片振动盘组件,306、银片校正组件,307、产品支撑组件;
[0039]
4、银片焊接机构,401、焊接动力装置,402、上电极,403、下电极,404吸尘罩;
[0040]
5、银点检测机构,501、银点检测第一动力装置,502、银点检测头组件,503、银点检测第二动力装置,504、第二支撑组件;
[0041]
6、搬运转移机构,601、搬运垂直动力装置,602、搬运水平动力装置,603、搬运机械手组件;
[0042]
7、圆环装配工站,701、圆环振动盘,702、圆环流道组件,703、圆环助推组件,704、装配工作台,705、产品固定组件,706、圆环装配机械手,707、产品搬运机械手;
[0043]
8、载具校正机构,801、校正针;
[0044]
9、机架电控箱,901、上料工作台;
[0045]
10、机架,
[0046]
11、机壳,1101、操控面板,1102、报警器,1103、安全光栅;
[0047]
a、待加工产品,b、银片,c、圆环。
具体实施方式
[0048]
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施例的限制。
[0049]
需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
[0050]
除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
[0051]
一种银片自动焊接、检测和圆环自动装配设备,如图1和图2所示,包括分度盘机构1、产品检测机构2、银片装配工站3、银片焊接机构4、银点检测机构5、搬运转移机构6、圆环装配工站7和载具校正机构8,上述机构固定在机架电控箱9上表面。如图3和图4所示,机架电控箱9上表面还设置有机架10和机壳11,内部集成电源控制系统和气源控制系统。
[0052]
如图5所示,为分度盘机构1的俯视图,上表面规则设置有用于装载待加工产品a的若干载具101,若干载具101对应形成若干生产工位,若干载具101经动力装置驱动在若干工位中依次切换。产品检测机构2、银片装配工站3、银片焊接机构4、银点检测机构5、搬运转移机构6、圆环装配工站7和载具校正机构8依次布置在分度盘机构1的若干工位处,分别对待加工产品进行银片的自动上料和焊接、银点检测、产品搬运转移、圆环的自动上料和装配、下料、以及载具的自动校正等。
[0053]
如图13所示,为一实施例的加工产品立体结构图,a为待加工产品,b为银片,c为圆环。
[0054]
产品检测机构2用于检测载具101中是否有待加工产品a,银片装配工站3用于将银片b装配到待加工产品a上,银片焊接机构4用于将装配好的银片b和待加工产品a进行焊接形成银点,银点检测机构5用于检测是否有银点,搬运转移机构6用于将检测好的待加工产品a从载具101中搬运至圆环装配工站7中进行圆环的装配,圆环装配工站7用于将圆环c装配到待加工产品a上,并将装配好的产品进行下料,载具校正机构8用于对取走待加工产品的空载具进行对齐校正,等待下一次的装载。
[0055]
本发明的生产工作流程如下:
[0056]
将待加工产品a装载至载具101中,分度盘机构1切换载具、将装载有待加工产品的载具依次切换至产品检测机构2处检测载具101中是否有产品,切换至银片装配工站3处将银片b装配到待加工产品a上,切换至银片焊接机构4处将银片b与待加工产品a进行焊接形成银点,切换至银点检测机构5处检测是否有银点,切换至搬运转移机构6处、经搬运转移机构6将待加工产品a搬运至圆环装配工站7处进行圆环的装配,分度机构1再次切换,载具校正机构8对取走待加工产品的载具进行校正、等待下一次的装载。
[0057]
如图6所示,为产品检测机构2的立体结构图,包括产品检测第一动力装置201、产品检测头202、产品固定组件203和产品检测第二动力装置204,产品固定组件203包括滑动基板和固定在其底端的压块,滑动基板上固定有产品检测第一动力装置201,产品检测第一动力装置201驱动产品检测头202垂直运动,向下运动时压覆载具中的待加工产品,通过位移距离判断载具中是否有待加工产品,产品检测第二动力装置驱动基板从而带动产品检测第一动力装置201和压块同步垂直运动,向下运动时固定载具开始检测载具中是否有待加工产品。
[0058]
如图7所示,为银片装配工站3的立体结构图,包括银片第一动力装置301、银片第二动力装置302、银片第三动力装置303、银片吸嘴组件304、银片振动盘组件305、银片校正组件306、产品支撑组件307和第一固定机构102。银片振动盘组件305用于银片的传送上料,银片第一动力装置301倾斜驱动银片吸嘴组件304垂直运动、向下吸取银片振动盘组件305取料处的银片,银片第二动力装置302驱动银片第一动力装置301前后摆动,向前垂直摆正下料、向后倾斜辅助上料;银片第三动力装置303驱动银片第二动力装置302和银片第一动力装置301同步水平运动、将银片从银片振动盘组件305处搬运到载具101处,在搬运过程中经银片校正组件306对银片进行方向校正;产品支撑组件307经动力装置驱动支撑待加工产品的底端,第一固定机构102经动力装置驱动固定待加工产品,防止其抖动造成不良品。如图5所示,第一固定机构102设置在分度盘机构1上。
[0059]
如图8所示,为银片焊接机构4的立体结构图,包括焊接动力装置401、上电极402、下电极403、吸尘罩404和焊接主机,焊接动力装置401驱动上电极402和下电极403同步垂直运动,向上运动时下电极403接触待加工产品下表面、上电极402经动力装置驱动下压待加工产品上端的银片进行电阻焊,焊接形成银点,吸尘罩404抽走焊接时所产生的烟雾和灰层,焊接主机固定在机架10上(如图3所示)。
[0060]
如图9所示,为银点检测机构5的立体结构图,包括银点检测第一动力装置501、银点检测头组件502、银点检测第二动力装置503和第二支撑组件504,银点检测第二动力装置503驱动第二支撑组件504垂直运动、向上运动时支撑待加工产品的下表面,银点检测第一动力装置501驱动银点检测头组件502垂直运动、向下运动时通过银点检测头组件502的位移信息判定待加工产品和银片的焊接情况。
[0061]
如图10所示,为搬运转移机构6的立体结构图,包括搬运垂直动力装置601、搬运水平动力装置602、搬运机械手组件603,搬运垂直动力装置601驱动搬运机械手组件603垂直运动、对待加工产品抓取和装载,搬运水平动力装置602驱动搬运垂直动力装置601带动搬运机械手组件603同步水平运动、实现待加工产品的搬运,搬运机械手组件603优先采用吸嘴进行吸取。
[0062]
如图11所示,为圆环装配工站7的立体结构图,包括圆环振动盘701、圆环流道组件702、圆环助推组件703、装配工作台704、产品固定组件705、圆环装配机械手706、产品搬运机械手707和分料组件708,圆环振动盘701将圆环c传送到圆环流道组件702中进行传送上料,圆环流道组件702包括缓冲组件,缓冲组件用于检测圆环流道组件702中的圆环位置、并通过位置信息控制圆环振动盘701的上料速度;搬运转移机构6将待加工产品搬运至装配工作台704中,圆环助推组件703将圆环流道组件702中传送过来的圆环推至装配工作台704中等待装配;产品固定组件705固定装配工作台704中的待加工产品,圆环装配机械手706由动
力装置驱动将装配工作台704中的圆环装配到待加工产品上,产品搬运机械手707将加工好的产品搬运至分料组件708中进行下料。圆环装配机械手706前道为压块,经动力装置驱动将圆环c压入到待加工产品a中,产品搬运机械手707优先采用吸嘴进行吸取。
[0063]
如图12所示,为载具校正机构8的立体结构图,包括校正针801,校正针801由动力装置驱动垂直运动、并插入到载具101中对载具进行位置校正。
[0064]
如图3所示,机架10用于承载和固定系统的主机。
[0065]
如图4所示,机壳11上设置有操控面板1101和报警器1102,前端设置有安全光栅1103,操控面板1101用于人机的交互,报警器1102用于异常报警。机壳11开有门窗,安全光栅1103设置在门窗两侧,避免工作人员随意接近机壳内部。
[0066]
如图1所示,机架电控箱9前端还设置有用于待加工产品上料和作业的上料工作台901。
[0067]
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips