
 商标分类
商标分类  商标转让
商标转让 
一种上下机头双工位搅拌摩擦焊设备的制作方法
 2021-01-29 14:01:31|
2021-01-29 14:01:31| 228|
228| 起点商标网
起点商标网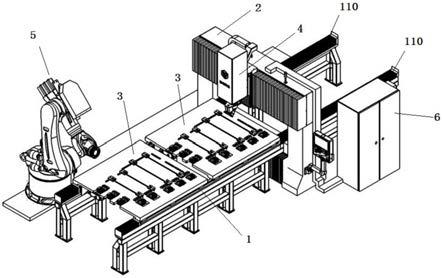
[0001]
本实用新型属于焊接设备领域,特别涉及一种上下机头双工位搅拌摩擦焊设备。
背景技术:
[0002]
搅拌摩擦焊是指利用高速旋转的焊具与工件摩擦产生的热量使被焊材料局部塑性化,当焊具沿着焊接界面向前移动时,被塑性化的材料在焊具的转动摩擦力作用下由焊具的前部流向后部,并在焊具的挤压下形成致密的固相焊缝。
[0003]
针对需要双面搅拌摩擦焊接的零件,现有设备和技术需要先焊接一面,然后把零件拆卸下来,翻转过来,焊接另一面,导致设备等待时间长,生产效率低,而且零件变形大,焊接质量低。
技术实现要素:
[0004]
本实用新型的目的是为解决以上问题,本实用新型提供一种上下机头双工位搅拌摩擦焊设备。
[0005]
一种上下机头双工位搅拌摩擦焊设备,包括工作台支架、机头支架、两个工件卡具、两个焊接机头、机器人和电气柜,机头支架设有中间空隙,两个焊接机头上、下对向设置于机头支架的中间空隙的两侧,工作台支架沿前后方向穿过中间空隙设置,使得两个焊接机头对准工作台支架的中间部位,两个工件卡具分别滑动设置于工作台支架的前后两端,且均能在工作台支架的的端部和与中间部位间反复运动,机器人可沿工作台支架的前后滑动设置。
[0006]
机器人、两个工件卡具、两个焊接机头均受电气柜控制,使得两个工件卡具能交替到达中间部位,并交替进行上、下同步的搅拌摩擦焊接,然后交替退回端部原位,当两个工件卡具交替退回端部原位时,机器人依序滑动到两个端部原位进行工件的替换。
[0007]
其中,机头支架包括上、下设置的两个横梁,两个焊接机头分别设置于两个横梁,工作台支架包括左、右设置的两个支撑梁,两个支撑梁均穿过中间空隙设置,工件卡具的左、右两端与分别与两个支撑梁滑动连接,工件卡具的工件卡位位于两个支撑梁之间。
[0008]
其中,焊接机头通过第一滑动部件与机头支架连接,第一滑动部件沿左右方向设置,焊接机头与第一滑动部件通过第二滑动部件连接,第二滑动部件沿上下方向设置。
[0009]
其中,焊接机头设有在左右方向具有
±
5度摆角的b轴并且所述上下两个焊接机头同时具备中心c轴,实现绕轴360度自转。
[0010]
其中,每个工件卡具通过配套的齿轮和齿条与工作台支架滑动连接,每个齿轮均对应通过一个电机驱动。
[0011]
本实用新型的上下机头双工位搅拌摩擦焊设备,实现上下两个机头同时焊接和双工位交替装卸零件,实现工件的连续和高效焊接。上下机头的同时焊接,还有效控制了零件在焊接过程的变形,提高焊接质量。
附图说明
[0012]
通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本实用新型的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
[0013]
图1示出了根据本实用新型实施方式的一种上下机头双工位搅拌摩擦焊设备的示意图;
[0014]
图2示出了根据本实用新型实施方式的一种上下机头双工位搅拌摩擦焊设备的侧视图。
具体实施方式
[0015]
下面将参照附图更详细地描述本公开的示例性实施方式。虽然附图中显示了本公开的示例性实施方式,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
[0016]
如图1-图2所示,一种上下机头双工位搅拌摩擦焊设备,包括工作台支架 1、机头支架2、两个工件卡具3、两个焊接机头4、机器人5和电气柜6,机头支架2包括上、下横梁和左、右侧梁。上、下横梁和左右侧梁围成设有中间空隙的支架结构。两个焊接机头4分别上、下对向地设置于机头支架2的上、下横梁,工作台支架1沿前后方向穿过中间空隙设置,使得两个焊接机头4均对准工作台支架1的中间部位,两个工件卡具3分别滑动设置于工作台支架1的前后两端,且均能在所述工作台支架1的端部和与所述中间部位间反复运动,机器人5可沿所述工作台支架1的前后滑动设置。
[0017]
机器人5、两个工件卡具3、两个焊接机头4均受电气柜控制,使得两个工件卡具3能交替到达中间部位,并交替进行上、下同步的搅拌摩擦焊接,然后交替退回端部原位,当两个工件卡具3交替退回端部原位时,机器人5依序滑动到两个端部原位进行工件的替换。
[0018]
工作台支架1包括左、右设置的两个支撑梁110,两个支撑梁110均穿过所述中间空隙设置,工件卡具3的左、右两端与分别与所述两个支撑梁的滑动连接,工件卡具3的工件卡位位于两个支撑梁110之间。工件通过工件卡具3 设置于两个支撑梁110之间时,可以使工件运动中间部位时,上、下两个焊接面对应暴露于两个焊接机头4的焊接区域。
[0019]
焊接机头4通过第一滑动部件与机头支架2连接,第一滑动部件沿左右方向设置,焊接机头4与第一滑动部件通过第二滑动部件连接,第二滑动部件沿上下方向设置。焊接机头的可沿上、下和左、右方位的设置,便于面对不同的焊缝位置时,焊接机头的灵活调整。
[0020]
焊接机头4设有在左右方向具有
±
5度摆角的b轴。b轴可以实现自动控制上下机头的焊接倾角。自动更换刀具需要将b轴调整到零度。并且所述上下两个焊接机头4具备中心c轴,可实现绕轴360度旋转,从而调整焊接工具的方向。
[0021]
工件卡具3通过配套的齿轮和齿条与工作台支架1滑动连接。在一个具体的实施例中,两个工件卡具3通过两套齿轮和齿条的轮动机构移动,两个工件卡具3在工作台支架1中单独运行。每套齿轮和齿条对应使用一个电机。双电机实现尺寸齿条间的间隙消除,保证定位精度。
[0022]
设备工作时,机器人或者工人在工作台支架1的前端,将待焊接工件装卡完毕,工
件随工件夹具3整体被推送到两个焊接机头4之间。上、下焊接机头4通过上、下移动向工件焊缝处靠近,按照程序对准焊缝,并从左向右对工件的焊缝逐个进行上下的同时焊接,焊接完一条焊缝时,上、下焊接机头4同时上、下移动远离焊缝,此时工件的下一条焊缝通过工件的左右移动被推送到焊接机头4的下方,上、下焊接机头4可以通过b轴在左右方向上的
±
5度摆角,保证沿着对下一条焊缝焊接时,机头倾角与焊接方向保持不变。并且所述上下两个焊接机头4具备中心c轴,可实现绕轴360度旋转,从而调整焊接工具的方向。
[0023]
机器人或者工人在工作台支架1的前端装卡完某一待焊接工件后,立即滑动到工作台支架1的后端,对工位2上的零件进行装卡,于此同时,上一前端装卡完毕的工件滑动到位,进行搅拌摩擦焊接。当其被焊接完毕后,工件和工件卡具3被整体原路退回到前端位置,与此同时,后端位置已装卡好的工件和工件卡具3被整体推送到上、下机头之间,进行搅拌摩擦焊接。机器人或者工人,快速到达前端位置,对该处已经焊接好的工件进行拆卸,并完成该处下一件待焊接工件的装卡。如此往复操作,实现对该搅拌摩擦设备的前、后两端双工位的连续焊接控制。
[0024]
以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips