
 商标分类
商标分类  商标转让
商标转让 
适用于金属板材折弯的随动托料装置的制作方法
 2021-01-29 14:01:01|
2021-01-29 14:01:01| 349|
349| 起点商标网
起点商标网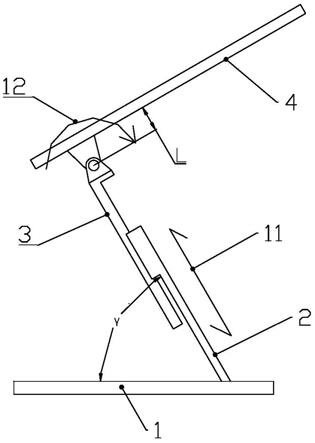
[0001]
本实用新型涉及板材折弯领域的托料装置,尤其涉及一种适用于金属板材折弯的随动托料装置。
背景技术:
[0002]
数控板材折弯是制造业里面很重要的工艺方法,所占比重很高。而在进行大尺寸板料折弯时,加工难度大,存在以下问题:1、板料自身重力下垂会对加工精度产生不良影响;2、翻转速度较快,板材重量较大的时候需要多人跟随板材折弯进行辅助作业,劳动强度大;3、存在安全隐患。
[0003]
目前市场上的现有技术中公开的托料装置,存在如下缺陷:1、结构过于复杂,占地面积大,体积笨重;2、响应速度较慢,满足不了高速折弯加工的需求;3、没能实现机构的运动学逆解,随动轨迹偏差较大,随动效果欠佳;4、随动的翻转角度较小。
[0004]
另外,在金属板材折弯加工行业,近年来采用机器人进行辅助折弯,虽然自动化程度较高,但是仍然存在如下问题:1、结构复杂,成本较高;2、需要示教编程,针对大批量单一品种的零件加工尚可,但是对于小批量、多品种加工模式完全不适用,示教编程效率太低;3、仅仅适用于重量较小的应用场合。
[0005]
因此,亟待解决上述问题。
技术实现要素:
[0006]
实用新型目的:本实用新型的目的是提供一种可实现运动学逆解,随动轨迹精确,随动效果好,响应速度快且翻转角度大的适用于金属板材折弯的随动托料装置。
[0007]
技术方案:为实现以上目的,本实用新型公开了一种适用于金属板材折弯的随动托料装置,包括固定底座、倾斜设置在固定底座上的固定轨道、可沿固定轨道来回移动的升降架以及与升降架一端相铰接用于承托板材的翻转台板,其中升降架沿固定轨道来回移动构成移动副,翻转台板与升降架铰接构成转动副。
[0008]
其中,在所述升降架与翻转台板铰接处的连接轴上固连有连接板,该连接板的一端依次连接有第一连杆和第一曲柄,连接板的另一端依次连接有第二连杆和第二曲柄,第一曲柄和第一曲柄均与固定底座相铰接;驱动第一曲柄和第二曲柄可实现翻转台板上下运动的同时进行翻转运动。
[0009]
优选的,所述连接板的中心处与升降架与翻转台板铰接处的连接轴相固连。
[0010]
再者,所述翻转台板在非工作状态下呈水平设置。
[0011]
进一步,所述固定轨道与固定底座的夹角为γ,移动副的斜率为tan(γ)。
[0012]
有益效果:与现有技术相比,本实用新型具有以下显著优点:首先本实用新型在工作状态下,随着折弯机的上模向下运动,板材完全折弯变形,协调驱动移动副和转动副动作,翻转台板承托板材跟随板材运动;翻转台板对板料进行承托,板材相对于翻转台板表面完全接触重合,但是会产生相对的滑动;本实用新型利用二自由度复合驱动的曲柄连杆机
构协调驱动移动副和转动副动作,曲柄连杆机构运动特性好、力特性好,动作缓和无冲击;本实用新型有效降低工人的劳动强度,提高加工精度、加工效率和加工安全性;其次本实用新型成本低廉,结构简单,便于推广;最后本实用新型与现有技术比较,在相同条件下,因本申请的固定轨道与固定底座成倾斜设置,使得本实用新型可实现较大的随动翻转角度,翻转能力强。
附图说明
[0013]
图1为本实用新型实施例1的结构示意图;
[0014]
图2为本实用新型实施例1的机构运动简图;
[0015]
图3为本实用新型实施例1中非工作状态下与折弯机配合使用的结构示意图;
[0016]
图4为本实用新型实施例1中工作状态下与折弯机配合使用的结构示意图;
[0017]
图5为本实用新型实施例1的运动学反解示意图;
[0018]
图6为本实用新型实施例1中固定轨道与固定底座有无倾角时的进给量和翻转角度的示意图一;
[0019]
图7为本实用新型实施例1中固定轨道与固定底座有无倾角时的进给量和翻转角度的示意图二;
[0020]
图8为本实用新型实施例2的结构示意图;
[0021]
图9为本实用新型实施例2的对应托料装置的机构运动简图;
[0022]
图10为本实用新型实施例2中等效的机构运动简图;
[0023]
图11为本实用新型实施例2中非工作状态下与折弯机配合使用的结构示意图;
[0024]
图12为本实用新型实施例2中工作状态下与折弯机配合使用的结构示意图;
[0025]
图13为本实用新型实施例2中的运动学反解示意图一;
[0026]
图14为本实用新型实施例2中的运动学反解示意图二;
[0027]
图15为本实用新型实施例2中固定轨道与固定底座有无倾角时的进给量和翻转角度的示意图一;
[0028]
图16为本实用新型实施例2中固定轨道与固定底座有无倾角时的进给量和翻转角度的示意图二。
具体实施方式
[0029]
下面结合附图对本实用新型的技术方案作进一步说明。
[0030]
实施例1
[0031]
如图1和图2所示,本实施例一种适用于金属板材折弯的随动托料装置,包括固定底座1、固定轨道2、升降架3和翻转台板4。固定轨道2倾斜设置在固定底座1上,固定轨道2与固定底座1的倾角为γ。升降架3可沿固定轨道2来回移动,升降架3沿固定轨道来回移动构成移动副11,该移动副的斜率为tan(γ)。翻转台板4与升降架3一端相铰接,该翻转台板4用于承托板材。升降架3由滚柱丝杆机构、齿轮齿条机构或直线电机驱动沿固定轨道2来回移动。翻转台板4与升降架3铰接构成转动副12,该转动副由旋转轴驱动旋转。
[0032]
如图3和图4所示,折弯机13上设有上模14和下模15,翻转台板4在非工作状态下呈水平设置,在工作状态下,随着折弯机的上模向下运动,板材16完全折弯变形,协调驱动移
动副和转动副动作,翻转台板承托板材跟随板材运动;翻转台板对板料进行承托,板材相对于翻转台板表面完全接触重合,但是会产生相对的滑动。
[0033]
本实用新型有效降低工人的劳动强度,提高加工精度、加工效率和加工安全性;其次本实用新型的成本低廉,结构简单,便于推广;再者本实用新型响应速度快,可实现了运动学逆解,随动轨迹精确,随动效果好,适合重载折弯过程中的随动设置。
[0034]
如图5所示,本实用新型一种适用于金属板材折弯的随动托料装置的运动学反解方法,包括如下步骤:
[0035]
(1)、升降架沿固定轨道来回移动构成移动副,翻转台板与升降架铰接构成转动副;非工作状态下,翻转台板呈水平设置状态,工作状态下,折弯机的上模具向下运动,板材完全折弯变形,协调驱动移动副和转动副动作,翻转台板承托板材跟随板材运动;
[0036]
(2)、首先建立坐标系xoy,原点o为非工作状态下翻转台板上表面与折弯机模具中心位置的交点;竖直向下的方向为y轴正向;水平且指向随动托料装置的方向为x轴;
[0037]
a点为工作状态下翻转台板上表面与折弯机模具中心位置的交点,d点为工作状态下翻转台板与升降架的铰接点,过d点作翻转台板上表面的平行线,该平行线与折弯模具中心线的交点为b点;c点为过a点作直线bd的垂线ac的垂点,e点为过d点作翻转台板上表面的垂线de的垂点;f点为非工作状态下翻转台板与升降架的铰接点,固定轨道与固定底座的倾角为γ;
[0038]
(3)、折弯过程中,板材的折弯半角为α,板材在折弯机模具中心位置的下行距离为d,f点的坐标为(x
f
,y
f
),移动副的斜率为tan(γ),根据f点的坐标和移动副斜率求解转动副的进给量β和移动副的进给量dis;具体求解方法为:
[0039]
直线de与竖直方向的夹角为β,则转动副的进给量β为:
[0040][0041]
b点坐标为:
[0042]
x
b
=0
[0043][0044]
其中l为转动副旋转中心到翻转台板上表面的距离,
[0045]
db两点连成直线的直线方程为:
[0046][0047]
令:
[0048][0049][0050]
则得到直线db的直线方程为:
[0051]
y=a1x+b1[0052]
df两点连成直线的直线方程为:
[0053]
y=tan(γ)x+(y
f-tan(γ)x
f
)
[0054]
令:
[0055]
a2=tan(γ)
[0056]
b2=y
f-tan(γ)x
f
[0057]
则得到直线df的直线方程:
[0058]
y=a2x+b2[0059]
根据db的直线方程和df的直线方程求解两条直线的交点d的坐标:
[0060][0061][0062]
再求解df的距离即为移动副的进给量dis:
[0063][0064]
本实用新型与现有技术比较,在相同条件下,因本实用新型的固定轨道与固定底座成倾斜设置,使得本实用新型可实现较大的随动翻转角度,翻转能力强。
[0065]
如图6所示,当翻转相同的角度rot0时,无倾角状态下移动副的进给量为dis1,有倾角状态下移动副的进给量为dis0。如图7所示,同样进给量为dis1时,无倾角状态下的翻转角度为rot0,有倾角状态下的翻转角度为rot1,明显当固定轨道与固定底座有倾角时翻转角度更大。
[0066]
实施例2
[0067]
如图8、图9和图10所示,本实用新型一种适用于金属板材折弯的随动托料装置,包括固定底座1、固定轨道2、升降架3、翻转台板4、连接轴5、连接板6、第一连杆7、第一曲柄8、第二连杆9和第二曲柄10。固定轨道2倾斜设置在固定底座1上,固定轨道2与固定底座1的倾角为γ。升降架3可沿固定轨道2来回移动,升降架3沿固定轨道来回移动构成移动副11,该移动副的斜率为tan(γ)。翻转台板4与升降架3一端相铰接,该翻转台板4用于承托板材,翻转台板4与升降架3铰接构成转动副12,在升降架与翻转台板铰接处的连接轴5上固连有连接板6,该连接板6的一端依次连接有第一连杆7和第一曲柄8,连接板6的另一端依次连接有第二连杆9和第二曲柄10,第一曲柄8和第二曲柄10均与固定底座1相铰接;驱动第一曲柄8和第二曲柄10可实现翻转台板4上下运动的同时进行翻转运动。连接板6的中心处与升降架3与翻转台板4铰接处的连接轴5相固连,第一连杆和第一曲柄构成的第一曲柄连杆机构,第二连杆和第二曲柄构成第二曲柄连杆机构,第一曲柄连杆机构和第二曲柄连杆机构分别设置在升降架3的两侧。
[0068]
如图11和图12所示,折弯机13上设有上模14和下模15,翻转台板4在非工作状态下呈水平设置,在工作状态下,随着折弯机的上模向下运动,板材16完全折弯变形,协调驱动移动副和转动副动作,翻转台板承托板材跟随板材运动;翻转台板对板料进行承托,板材相对于翻转台板表面完全接触重合,但是会产生相对的滑动。
[0069]
本实用新型在工作状态下,随着折弯机的上模向下运动,板材完全折弯变形,利用二自由度复合驱动的曲柄连杆机构协调驱动移动副和转动副动作,翻转台板承托板材跟随
[0088]
df两点连成直线的直线方程为:
[0089]
y=tan(γ)x+(y
f-tan(γ)x
f
)
[0090]
令:
[0091]
a2=tan(γ)
[0092]
b2=y
f-tan(γ)x
f
[0093]
则得到直线df的直线方程:
[0094]
y=a2x+b2[0095]
根据db的直线方程和df的直线方程求解两条直线的交点d的坐标:
[0096][0097][0098]
翻转台板与第一连杆的铰接点为d1,第一曲柄与固定底座的铰接点为o1,第二曲柄与固定底座的铰接点为o2,翻转台板与第二连杆的铰接点为d2,计算d1点的坐标;
[0099]
计算中间变量θ
10
和中间变量θ
11
:
[0100][0101][0102]
其中,l1是d1点距离翻转台板上表面的距离,e1为d点和d1点沿翻转台板方向的距离;
[0103]
计算直线dd1的长度为:
[0104][0105]
可计算得到d1点的坐标:
[0106]
x
d1
=x
d-s1cos(θ
11
)
[0107]
y
d1
=y
d
+s1sin(θ
11
)
[0108]
计算中间变量
[0109][0110]
其中x1为o1点的x轴坐标,y1为o1点的y轴坐标;
[0111]
直线o1d1的长度为:
[0112][0113]
由余弦定理可得到:
[0114][0115]
其中r1为第一曲柄的长度,h1为第一连杆的长度;
[0116]
可得到第一曲柄的驱动角度ω1:
[0117][0118]
计算中间变量θ
20
,θ
21
:
[0119][0120][0121]
其中l2是d2点距离翻转台板上表面的距离,e2为d点和d2点沿翻转台板方向的距离;
[0122]
可计算得到d2点的坐标:
[0123]
x
d2
=x
d
+s2cos(θ
21
)
[0124]
y
d2
=y
d-s2sin(θ
21
)
[0125]
计算中间变量
[0126][0127]
其中x2为o2点的x轴坐标,y2为o2点的y轴坐标;
[0128]
直线o2d2的长度为:
[0129][0130]
由余弦定理可得到:
[0131][0132]
其中r2为第二曲柄的长度,h2为第二连杆的长度;
[0133]
可得到第二曲柄的驱动角度ω2:
[0134][0135]
本实用新型与现有技术比较,在相同条件下,因本实用新型的固定轨道与固定底座成倾斜设置,使得本实用新型可实现较大的随动翻转角度,翻转能力强。
[0136]
如图15所示,当翻转相同的角度rot0时,无倾角状态下移动副的进给量为dis1,有倾角状态下移动副的进给量为dis0。如图16所示,同样进给量为dis1时,无倾角状态下的翻转角度为rot0,有倾角状态下的翻转角度为rot1,明显当固定轨道与固定底座有倾角时翻转角度更大。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips