
 商标分类
商标分类  商标转让
商标转让 
一种多辊自由弯曲装置的制作方法
 2021-01-29 13:01:58|
2021-01-29 13:01:58| 277|
277| 起点商标网
起点商标网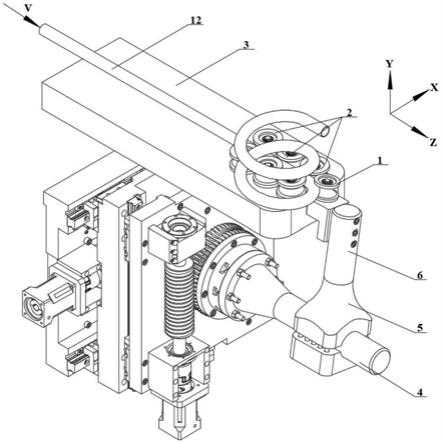
[0001]
本实用新型为一种多辊自由弯曲装置,属于空心构件自由弯曲制造领域。
背景技术:
[0002]
各种复杂形状的弯曲空心构件在航空航天、汽车船舶、石油化工等领域均有广泛的应用和极大的需求。传统的弯曲工艺如绕弯、推弯、滚弯和压弯等只能成形简单形状的构件,并且需要多次更换模具,造成加工工艺复杂、加工成本高等劣势,而自由弯曲成形技术则能实现空心构件的三维复杂弯曲,满足构件成形质量好,成形精度高等要求。
[0003]
现有的自由弯曲装备按轴数分包括三轴、四轴、五轴、六轴等自由弯曲成形装备。轴数越多,则成形空心构件的柔性越大,但是装备在结构上变得臃肿,加工制造变得更加复杂。
技术实现要素:
[0004]
本实用新型针对现有技术的不足提供一种多辊自由弯曲装置。
[0005]
本实用新型提供的技术方案为:
[0006]
一种多辊自由弯曲装置,包括成形辊1、导向辊轮组以及驱动机构、导向辊安装座 3、回转移动工作台4、摇臂5、成形辊安装座6,每组导向辊轮组包括两个相对设置的导向辊2,两个相对设置的导向辊2之间形成圆形轮廓。
[0007]
所述的多辊自由弯曲装置,所述驱动机构包括x向移动机构、y向移动机构和z 向旋转机构;x向移动机构包括x向直线导轨13、第一直线导轨安装板14、x向丝杠螺母运动副15、x向滑块16、x向丝杠轴承座17;y向移动机构包括第二直线导轨安装板18、y向直线导轨19、y向丝杠螺母运动副20、y向滑块21、y向丝杠轴承座22;z向旋转机构包括z向蜗杆轴承座23、蜗杆24、带蜗轮齿的回转支承轴承25、z向旋转机构安装板26。
[0008]
所述的多辊自由弯曲装置,x向直线导轨13的两个平行滑轨水平安装在x向丝杠螺母及第一直线导轨安装板14上,而x向直线导轨13的4个配套滑块则与第二直线导轨安装板18连接,x向丝杠螺母运动副15通过x向丝杠轴承座17固定在第一直线导轨安装板14上,与x向丝杠螺母运动副15连接的x向滑块16则是通过螺钉与第二直线导轨安装板18连接;第一直线导轨安装板14通过螺钉和定位销固定在机床上;当电机驱动x向丝杠螺母运动副15旋转时,x向滑块16便会做直线运动,此时x向滑块 16会带动与之连接的第二直线导轨安装板18沿着直线导轨的滑槽做x向直线运动。
[0009]
所述的多辊自由弯曲装置,y向直线导轨19的两个平行滑轨竖直安装在第二直线导轨安装板18上,而y向直线导轨19的4个配套滑块则与z向旋转机构安装板26连接,y向丝杠螺母运动副20通过y向丝杠轴承座22固定在第二直线导轨安装板18上,与y向丝杠螺母运动副20连接的y向滑块21则是通过螺钉与z向旋转机构安装板26 连接;当电机驱动y向丝杠旋转时,y向滑块21便会做直线运动,此时y向滑块21 会带动与之连接的z向旋转机构安装板26沿着y向直线导轨19的滑槽做y向直线运动。
[0010]
所述的多辊自由弯曲装置,z向旋转机构的蜗杆轴承座23通过螺钉固定在安装板 26上,带蜗轮齿的回转支承轴承25的外圈蜗轮齿和内圈有一定高度差,内圈固定在安装板26上,外圈蜗轮齿与工作台42连接,同时外圈蜗轮齿与蜗杆啮合;当电机驱动蜗杆轴旋转时,外圈蜗轮齿便绕着z向做定传动比的连续转动,同时带动回转移动工作台 4、摇臂5和成形辊1做旋转运动。
[0011]
所述的多辊自由弯曲装置,成形辊1和导向辊2的凹槽均是弧形轮廓,弧形半径为 r,半径公差在-0.05~0mm之内,并且弧形槽与空心构件的同轴度误差不超过0.02mm,安装间隙不超过0.1mm。
[0012]
所述的多辊自由弯曲装置,导向辊轮组一共有三组。
[0013]
所述的多辊自由弯曲装置,摇臂5包括摇臂杆51和摇臂头52,成形辊1通过连接轴安装在成形辊安装座6上,成形辊安装座6与摇臂杆51通过螺栓固定在一起;摇臂杆51和摇臂头52通过螺栓与回转轴42连接;摇臂杆51与回转轴42垂直,工作台41 上设置沉孔,回转轴42插入该沉孔内定位,工作台41上还设置多个t型槽,t型槽和回转轴42通过t型螺栓实现紧固连接。
[0014]
所述的多辊自由弯曲装置,回转轴42与工作台41垂直,成形辊1的连接轴与摇臂杆51轴线平行。
[0015]
本实用新型的有益效果在于:(1)、辊轮组结构简单,加工方便,制造成本低;(3)、辊轮与空心构件之间的摩擦力均是滚动摩擦力,有效的减小了空心构件在推进过程中的阻力,大大的提高了空心构件弯曲成形质量和成形精度;(4)、辊轮与安装座之间设置5 组0.02mm的调整垫片,方便装配人员调试空心构件与辊轮凹槽之间的同轴度以及装配间隙。
附图说明
[0016]
图1为基于多辊的自由弯曲装置结构图;
[0017]
图2为成形辊和导向辊装配图;(a)成形辊装配图,(b)导向辊装配图;
[0018]
图3为回转移动工作台、摇臂和成形辊安装座等零件安装方式图;
[0019]
图4,(a)连接轴端部的扳手槽断面图,(b)连接轴与辊轮安装座处设置的调整垫片放大图;
[0020]
图5为基于多辊的自由弯曲装置驱动机构分解图;(a)x向移动机构,(b)y向移动机构,(c)z向旋转机构;
[0021]
1-成形辊;2-导向辊;3-导向辊安装座;4-回转移动工作台;5-摇臂;6-成形辊安装座;7、8-深沟球轴承;9-调整垫片;10-连接轴;11-轴端挡圈;12-空心构件;13-x向直线导轨;14-第一直线导轨安装板;15-x向丝杠螺母运动副;16-x向滑块;17-x向丝杠轴承座;18-第二直线导轨安装板;19-y向直线导轨;20-y向丝杠螺母运动副;21-y 向滑块;22-y向丝杠轴承座;23-蜗杆轴承座;24-蜗杆;25-带蜗轮齿的回转支承轴承; 26-z向回转机构安装板;41-工作台,42-回转轴,51-摇臂杆,52-摇臂头;
具体实施方式
[0022]
以下结合具体实施例,对本实用新型进行详细说明。
[0023]
参考图1-5,一种多辊自由弯曲装置,包括成形辊1、三组导向辊轮组及驱动机构、
导向辊安装座3、回转移动工作台4、摇臂5、成形辊安装座6,每组导向辊轮组包括两个相对设置的导向辊2,两个相对设置的导向辊2之间形成圆形轮廓。成形辊1和导向辊2的凹槽均是弧形轮廓,弧形半径为r,半径公差在-0.05~0mm之内,并且弧形槽与空心构件的同轴度误差不超过0.02mm,安装间隙不超过0.1mm。
[0024]
参考图2,在连接轴10底部预置5个0.02mm的调整垫片9,通过扳手拧动连接轴上的扳手槽,实现连接轴与导向辊安装座3或成形辊安装座6的紧固,再通过轴承压入器将2个轴承7、8压入到辊轮中,之后将带有轴承7、8的辊轮压入到连接轴上上轴承的外侧设置轴端挡圈11进行定位。
[0025]
参考图3,摇臂5包括摇臂杆51和摇臂头52,成形辊1通过连接轴安装在成形辊安装座6上,成形辊安装座6与摇臂杆51通过螺栓固定在一起;摇臂杆51和摇臂头52 通过螺栓与回转轴42连接;摇臂杆51与回转轴42垂直,工作台41上设置沉孔,回转轴42插入该沉孔内定位,工作台41上还设置多个t型槽,t型槽和回转轴42通过t 型螺栓实现紧固连接,回转轴42与工作台41垂直,成形辊1的连接轴与摇臂杆51轴线平行。
[0026]
参考图5,所述驱动机构包括x向移动机构、y向移动机构和z向旋转机构;x向移动机构包括x向直线导轨13、第一直线导轨安装板14、x向丝杠螺母运动副15、x 向滑块16、x向丝杠轴承座17;y向移动机构包括第二直线导轨安装板18、y向直线导轨19、y向丝杠螺母运动副20、y向滑块21、y向丝杠轴承座22;z向旋转机构包括z向蜗杆轴承座23、蜗杆24、带蜗轮齿的回转支承轴承25、z向旋转机构安装板26。
[0027]
x向直线导轨13的两个平行滑轨水平安装在第一直线导轨安装板14上,而x向直线导轨13的4个配套滑块则与第二直线导轨安装板18连接,x向丝杠螺母运动副15 通过x向丝杠轴承座17固定在第一直线导轨安装板14上,与x向丝杠螺母运动副15 连接的x向滑块16则是通过螺钉与第二直线导轨安装板18连接;第一直线导轨安装板 14通过螺钉和定位销固定在机床上;当电机驱动x向丝杠螺母运动副15旋转时,x向滑块16便会做直线运动,此时x向滑块16会带动与之连接的第二直线导轨安装板18 沿着直线导轨的滑槽做x向直线运动。
[0028]
y向直线导轨19的两个平行滑轨竖直安装在第二直线导轨安装板18上,而y向直线导轨19的4个配套滑块则与z向旋转机构安装板26连接,y向丝杠螺母运动副20 通过y向丝杠轴承座22固定在第二直线导轨安装板18上,与y向丝杠螺母运动副20 连接的y向滑块21则是通过螺钉与z向旋转机构安装板26连接;当电机驱动y向丝杠旋转时,y向滑块21便会做直线运动,此时y向滑块21会带动与之连接的z向旋转机构安装板26沿着y向直线导轨19的滑槽做y向直线运动。
[0029]
z向旋转机构的蜗杆轴承座23通过螺钉固定在安装板26上,带蜗轮齿的回转支承轴承25的外圈蜗轮齿和内圈有一定高度差(z向上有一定高度差,外圈蜗轮齿可以在内圈上旋转),内圈固定在安装板26上,外圈蜗轮齿与工作台41连接,同时外圈蜗轮齿与蜗杆啮合;当电机驱动蜗杆轴旋转时,外圈蜗轮齿便绕着z向做定传动比的连续转动,同时带动回转移动工作台4、摇臂5和成形辊1做旋转运动。
[0030]
在x向驱动机构、y向驱动机构和z向旋转机构的共同作用下回转移动工作台4、摇臂5和成形辊1可以在xy平面内实现x/y向移动以及z向旋转的三自由度运动。
[0031]
工作台41在xy平面内发生移动和转动时,会带动与之连接的回转轴42同步运动,
回转轴42则将动力传递给摇臂杆51和摇臂头52,使得摇臂杆51在xy平面内做平面运动,与摇臂杆51连接的成形辊安装座6和成形辊1便实现了在xy平面内的移动和转动。
[0032]
本实用新型在实施时,首先将空心构件12送入导向辊2之间,并将送料推进机构的顶杆塞入空心构件的尾部,导向推进机构的顶杆推动空心构件沿着导向导向辊之间的凹槽移动,导向辊受到空心构件施加的滚动摩擦力而发生转动,通过摇臂控制成形辊的运动轨迹,成形辊给空心构件施加一个弯曲作用力,开始自由弯曲。
[0033]
应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本实用新型所附权利要求的保护范围。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips