
 商标分类
商标分类  商标转让
商标转让 
一种新型加热炉步进控制装置的制作方法
 2021-03-10 01:03:08|
2021-03-10 01:03:08| 324|
324| 起点商标网
起点商标网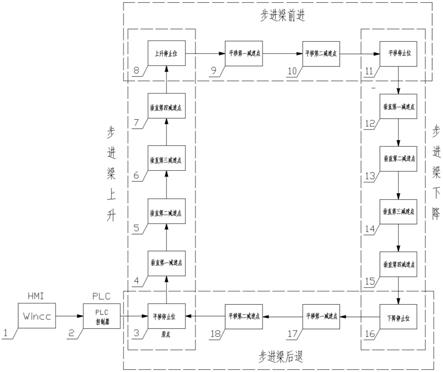
[0001]
本实用新型涉及炼钢技术领域,具体涉及一种新型加热炉步进控制装置。
背景技术:
[0002]
当前阳春新钢铁轧钢厂三座蓄热式加热炉平移、升降控制均采用“位移传感器控制模式”,通过加热炉步进梁平移、升降液压油缸中的内置式位移传感器来感应油缸内磁环位置,来判断油缸伸缩位置,然后将位置数值反馈给plc控制器,plc控制器根据位移传感器的读数和实际需要达到的设定位置值,来控制加热炉步进梁平移、升降油缸比列阀的流量百分比使加热炉步进梁平移、升降到设定位置从而控制加热炉平移、升降位置,升降速度等过程实现加热炉步进控制。
[0003]“位移传感器控制模式”技术的缺陷与不足:
[0004]
1、位移传感器控制模式靠检测油缸伸缩位置和plc数据的计算来判断加热炉平移、升降实际位置,没有检测加热炉步进梁本体的实际位置,由于加热炉步进梁框架运动过程中的卡阻、框架的变形量、框架的负载情况等,导致步进梁实际位置与油缸伸缩位置有差异从而引发测量数据不准,影响加热炉步进周期和步距。
[0005]
2、位移传感器控制模式未考虑故障状态对加热炉平移、升降位置的影响:位移传感器的位置判断靠感应液压油缸内磁环位置来判断,在加热炉平移、升降油缸发生故障如油缸发生严重内泄、加热炉平移、升降控制比例阀卡阻等流体设备异常状态下,加热炉平移、升降位置检测数据会发生剧烈波动严重影响加热炉步进周期和步距,造成生产事故。
[0006]
3、位移传感器控制模式未考虑外部环境对设备的影响:加热炉平移、升降油缸安装位置位于加热炉高温、高尘区域但位移传感器控制模式未安装任何防高温、防灰尘装置,较高的环境温度和较大的灰尘对加热炉平移、升降油缸的内置磁环,位移传感器的检测精度等都会造成严重影响从而影响位移传感器的位置数据,造成加热炉步进周期和步距的波动。
[0007]
4、位移传感器控制模式成本较高维护难度大:位移传感器控制模式采用内置传感器油缸,内置传感器液压油缸相比普通液压油缸成本较高且位移传感器位于油缸内部,不便于对位移传感器的点检维护。
技术实现要素:
[0008]
针对现有技术的不足,本实用新型的目的在于提供一种新型加热炉步进控制装置,能够实现步进式加热炉步进位置的实时检测,根据步进位置数据和工艺时态对步距进行自动调整修正,保障步进周期及步距的实时性、连续性、稳定性。
[0009]
为实现上述目的,本实用新型提供如下技术方案:
[0010]
本实用新型提供了一种新型加热炉步进控制装置,它主要包括加热炉步进平移控制器和加热炉步进升降控制器;
[0011]
所述加热炉步进平移控制器通过步进梁的前进停止位接近开关、后退停止位接近
开关、平移第一中间位接近开关、平移第二中间位接近开关、plc控制器及plc控制程序来控制加热炉平移状态的前进、后退位置和平移步距调整;
[0012]
所述加热炉步进升降控制器通过步进梁的上升停止位接近开关、下降停止位接近开关、垂直第一中间位接近开关、垂直第二中间位接近开关来控制加热炉升降动作的上升、下降位置和升降速度调整。
[0013]
如上述的一种新型加热炉步进控制装置,所述前进停止位接近开关:收集步进梁前进到位信号,用于触发步进梁前进停止命令;用于复位步进梁前进减速点的置位信号;
[0014]
所述后退停止位接近开关:收集步进梁后退到位信号,用于触发步进梁后退停止命令;用于复位步进梁后退减速点的职位信号;
[0015]
所述平移第一中间位接近开关:用于触发步进梁前进第一减速点信号;用于触发后退第二减速点信号;
[0016]
所述平移第二中间位接近开关:用于触发步进梁后退第一减速点信号;用于触发前进第二减速点信号。
[0017]
如上述的一种新型加热炉步进控制装置,所述升停止位接近开关:收集步进梁上升到位信号,用于触发步进梁上升停止命令;用于复位步进梁上升减速点的位置信号;
[0018]
所述下降停止位接近开关:收集步进梁下降到位信号,用于触发步进梁下降停止命令;用于复位步进梁下降减速点的位置信号;
[0019]
所述垂直第一中间位接近开关:用于触发上升第一减速点信号;用于触发上升第二个减速点信号;用于触发下降第三减速点信号;用于触发下降第四减速点信号;
[0020]
所述垂直第二中间位接近开关:用于触发下降第一减速点信号;用于触发下降第二个减速点信号;用于触发上升第三减速点信号;用于触发上升第四减速点信号。
[0021]
如上述的一种新型加热炉步进控制装置,它还包括安装支架和隔热防尘装置,前进停止位接近开关、后退停止位接近开关、平移第一中间位接近开关、平移第二中间位接近开关、上升停止位接近开关、下降停止位接近开关、垂直第一中间位接近开关和垂直第二中间位接近开关均通过安装支架安装在隔热防尘装置的内部。
[0022]
所有接近开关信号作滤波处理,避免信号波动产生的误信号;所有位置信号通过接近开关收集,经过延时器处理后置位输出,使位置信号具备微调的作用;在原有软控基础上制作操作画面。
[0023]
与现有技术相比,本实用新型的有益效果是:
[0024]
1、通过步进梁实际位置的检测避免由于加热炉步进梁框架运动过程中的卡阻、框架的变形量、框架的负载情况等,导致实际位置与油缸伸缩位置有差异造成的“位移传感器控制模式”测量数据不准,影响加热炉步进周期和步距的问题。
[0025]
2、通过发明创造一种全新的步进式加热炉步进周期控制模式解决了“位移传感器控制模式”在异常状态下如加热炉平移、升降油缸发生故障如油缸发生严重内泄、加热炉平移、升降控制比列阀卡阻等,造成的加热炉平移、升降位置检测数据剧烈波动的问题。
[0026]
3、通过发明一种隔热防尘保护装置解决了“位移传感器控制模式”下外部环境对加热炉平移、升降油缸的内置磁环,位移传感器检测精度影响的问题
[0027]
4、通过通过发明创造一种外接式的步进式加热炉步进控制器解决了“位移传感器控制模式”下位移传感器点检维护力度大、成本高的问题。
附图说明
[0028]
图1为本实用新型的加热炉步进平移控制器的安装结构示意图;
[0029]
图2为本实用新型的加热炉步进升降控制器的安装结构示意图;
[0030]
图3为本实用新型的工作原理图。
具体实施方式
[0031]
下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
[0032]
请参阅图1-3,本实用新型提供的一种实施例:本实用新型提供了一种新型加热炉步进控制装置,它主要包括加热炉步进平移控制器和加热炉步进升降控制器。
[0033]
所述加热炉步进平移控制器通过步进梁的前进停止位接近开关、后退停止位接近开关、平移第一中间位接近开关、平移第二中间位接近开关、plc控制器及plc控制程序来控制加热炉平移状态的前进、后退位置和平移步距调整;所述前进停止位接近开关:收集步进梁前进到位信号,用于触发步进梁前进停止命令;用于复位步进梁前进减速点的置位信号;所述后退停止位接近开关:收集步进梁后退到位信号,用于触发步进梁后退停止命令;用于复位步进梁后退减速点的职位信号;所述平移第一中间位接近开关:用于触发步进梁前进第一减速点信号;用于触发后退第二减速点信号;所述平移第二中间位接近开关:用于触发步进梁后退第一减速点信号;用于触发前进第二减速点信号。
[0034]
所述加热炉步进升降控制器通过步进梁的上升停止位接近开关、下降停止位接近开关、垂直第一中间位接近开关、垂直第二中间位接近开关来控制加热炉升降动作的上升、下降位置和升降速度调整,所述升停止位接近开关:收集步进梁上升到位信号,用于触发步进梁上升停止命令;用于复位步进梁上升减速点的位置信号;所述下降停止位接近开关:收集步进梁下降到位信号,用于触发步进梁下降停止命令;用于复位步进梁下降减速点的位置信号;所述垂直第一中间位接近开关:用于触发上升第一减速点信号;用于触发上升第二个减速点信号;用于触发下降第三减速点信号;用于触发下降第四减速点信号;所述垂直第二中间位接近开关:用于触发下降第一减速点信号;用于触发下降第二个减速点信号;用于触发上升第三减速点信号;用于触发上升第四减速点信号。
[0035]
如上述的一种新型加热炉步进控制装置,它还包括安装支架和隔热防尘装置,前进停止位接近开关、后退停止位接近开关、平移第一中间位接近开关、平移第二中间位接近开关、上升停止位接近开关、下降停止位接近开关、垂直第一中间位接近开关和垂直第二中间位接近开关均通过安装支架安装在隔热防尘装置的内部。
[0036]
参考图1所示,一种加热炉步进平移控制器的安装:
[0037]
1、在现场基础墙体106上安装步进梁107,步进梁107上加热炉步进平移控制器信号检测装置支架102、信号检测装置103、接近开关安装支架105;
[0038]
2、安装加热炉步进平移控制器的平移接近开关104,如前进停止位接近开关、后退停止位接近开关、平移第一中间位接近开关、平移第二中间位接近开关;
[0039]
3、安装加热炉步进平移控制器隔热防尘保护装置101,隔热防尘保护装置101设置在现场基础墙体106上;
[0040]
4、将加热炉步进平移控制器与加热炉plc控制器相连;
[0041]
5、编制加热炉步进平移控制器控制程序。
[0042]
参考图2所示,一种加热炉步进升降控制器的安装:
[0043]
1、在梁201上安装加热炉步进升降控制器信号检测装置支架202、信号检测装置204、接近开关安装支架206;
[0044]
2、安装加热炉步进升降控制器上升降接近开关205,如升停止位接近开关、下降停止位接近开关、升降第一中间位接近开关、升降第二中间位接近开关;
[0045]
3、安装加热炉步进升降控制器隔热防尘保护装置203;
[0046]
4、将加热炉步进升降控制器与加热炉plc控制器相连;
[0047]
5、编制加热炉步进升降控制器控制程序。
[0048]
参考图3所示,一种步进式加热炉步进控制器接近开关作用如下:
[0049]
1、前进极限位接近开关:收集平移停止位11步进梁前进到位信号,用于触发平移停止位11步进梁前进停止命令;用于复位平移第一减速点9、平移第二减速点10步进梁前进减速点的置位信号;
[0050]
2、后退极限位接近开关:收集平移停止位3步进梁后退到位信号,用于触发平移停止位3步进梁后退停止命令;用于复位平移第一减速点17、平移第二减速点18步进梁后退减速点的职位信号;
[0051]
3、平移第一中间位接近开关:用于触发平移第一减速点9步进梁前进第一减速点信号;用于触发平移第二减速点18后退第二减速点信号;
[0052]
4、平移第二中间位接近开关:用于触发平移第一减速点17步进梁后退第一减速点信号;用于触发平移第二减速点10前进第二减速点信号;
[0053]
5、上升极限位接近开关:收集上升停止位8步进梁上升到位信号,用于触发上升停止位8步进梁上升停止命令;用于复位垂直第一减速点4、垂直第二减速点5、垂直第三减速点6、垂直第四减速点7步进梁上升减速点的位置信号;
[0054]
6、下降极限位接近开关:收集下降停止位16步进梁下降到位信号,用于触发下降停止位16步进梁下降停止命令;用于复位步垂直第一减速点12、垂直第二减速点13、垂直第三减速点14、垂直第四减速点15进梁下降减速点的位置信号;
[0055]
7、垂直第一中间位接近开关:用于触发垂直第一减速点4上升第一减速点信号;用于触发垂直第二减速点5上升第二个减速点信号;用于触发垂直第三减速点14下降第三减速点信号;用于触发垂直第四减速点15下降第四减速点信号;
[0056]
8、垂直第二中间位接近开关:用于触发垂直第一减速点12下降第一减速点信号;用于触发垂直第二减速点13下降第二个减速点信号;用于触发垂直第三减速点6上升第三减速点信号;用于触发垂直第四减速点7上升第四减速点信号;
[0057]
新型加热炉步进控制器安装后实现步进梁全自动正循环的工作原理:
[0058]
步进梁在平移停止位3原位,控制方式选全自动,动作方式选正循环,wincc1画面点自动开始,plc控制器2控制步进梁步数为1,与其他设备连锁条件满足,步进梁开始上升动作;
[0059]
上升动作开始,在到达垂直第一减速点4前步进梁加速到高速上升,到达垂直第一减速点4后开始减速到低速上升,到达垂直第二减速点5后步进梁开始加速到高速上升,到
达垂直第三减速点6后步进梁开始减速到中速上升,到达垂直第四减速点7步进梁减速到低速上升,到达上升停止位8后停止,停止一定时间后步进梁步数为3;
[0060]
步进梁步数为3步进梁开始前进动作,在到达平移第一减速点9步进梁加速到高速前进,到达平移第二减速点10后步进梁减速到低速前进,到达平移停止位11后停止,停止一定时间后步进梁步数为5;
[0061]
步进梁步数为5步进梁开始下降,在到达垂直第一减速点12前步进梁加速到高速下降,到达垂直第一减速点12后开始减速到低速下降,到达垂直第二减速点13后步进梁开始加速到高速下降,到达垂直第三减速点14后步进梁开始减速到中速下降,到达垂直第四减速点15步进梁减速到低速下降,到达下降停止位16后停止,停止一定时间后步进梁步数为7;
[0062]
步进梁步数为7步进梁后退动作,在到达平移第一减速点17步进梁加速到高速后退,到达平移第二减速点18后步进梁减速到低速后退,到达平移停止位3后停止,停止一定时间后步进梁步数为8;一定时间后步进梁步数为1,步进梁完成一个循环周期。
[0063]
对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips