
 商标分类
商标分类  商标转让
商标转让 
一种机械手臂合模保护用安全回路系统的制作方法
 2021-02-24 03:02:06|
2021-02-24 03:02:06| 470|
470| 起点商标网
起点商标网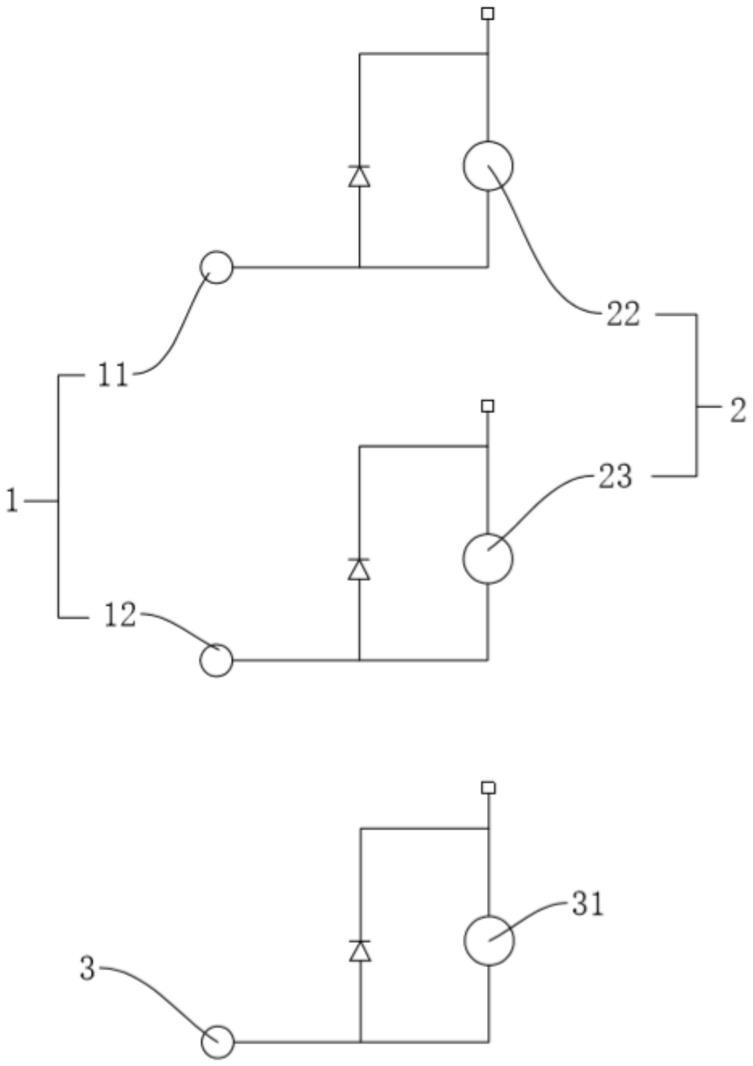
[0001]
本实用新型涉及注塑自动化技术领域,特别涉及一种机械手臂合模保护用安全回路系统。
背景技术:
[0002]
机械手广泛应用于注塑行业,当高吨位注塑机通过模具成型产品后,由机械手代替人工将产品取出,取出产品后手臂上升至安全位置,此时注塑机合模进行下一次生产。现有技术中注塑机和机械手分别通过两个不同的控制器进行控制,机械手与注塑机之间通过一根射连线相连。
[0003]
现有技术中存在以下不足:虽然程序中已经确保安全,但特殊情况下由于信号干扰或人为接线错误,易导致手臂尚处于模具中注塑机便会合模,注塑机的合模力达到数千公斤力,一旦机械手在下降位置处合模,会造成模具和机械手的损坏,带来较大经济损失,此问题亟待解决。
技术实现要素:
[0004]
针对现有技术存在的不足,本实用新型的目的在于提供一种机械手臂合模保护用安全回路系统,具有有效避免机械手尚未移出模具注塑机即合模的情况,降低模具和机械手发生损坏的可能,从而有效避免经济损失的效果。
[0005]
一种机械手臂合模保护用安全回路系统,包括z轴上位传感器以及置物侧x18传感器,所述z轴上位传感器连接于机械手上,所述置物侧x18 传感器连接于机械手横行轴置物侧,所述z轴上位传感连接有第一继电器,所述置物侧x18传感器连接有ry1继电器,所述第一继电器与ry1继电器并联;
[0006]
机械手由模具内移动至模具上方后,所述z轴上位传感器打开,所述第一继电器的线圈得电,所述第一继电器的常开触点闭合,注塑机合模;
[0007]
机械手由模具内移动至模具外后,所述置物侧x18传感器打开,所述 ry1继电器线圈得电,所述ry1继电器的常开触点闭合,注塑机合模。
[0008]
本实用新型进一步设置为:所述第一继电器和ry1继电器均串联有合模继电器,所述第一继电器和ry1继电器均与合模继电器的一个常开触点相连。
[0009]
本实用新型进一步设置为:所述z轴上位传感器包括x00传感器和x07 传感器,所述x00传感器和x07传感器分别安装于机械手的两个手臂上,所述第一继电器包括ry2继电器和ry3继电器,所述ry3继电器的一个常开触点与x00传感器相连,所述ry2继电器的一个常开触点与x07传感器相连,所述ry2继电器与ry3继电器串联。
[0010]
本实用新型进一步设置为:所述ry1继电器、ry2继电器和ry3继电器均连接有24v电源。
[0011]
本实用新型进一步设置为:所述x00传感器、x07传感器和置物侧x18 传感器均从cn501接头处引出。
[0012]
本实用新型进一步设置为:所述ry1继电器、ry2继电器和ry3继电器和合模继电器均为中间继电器。
[0013]
两个机械手分别将两个注塑件由模具之间拿出后,当机械手由低处升至一定高度后,连接于机械手的两个手臂上的x00传感器和x07传感器打开,此时分别与x00和x07传感器相连的ry2继电器和ry3继电器线圈得电,ry2和ry3与x00和x07相连的常开触点闭合,此时合模继电器线圈得电,合模继电器的常开触点闭合,注塑机可以合模。当两个机械手平移至模具外后,置物侧x18传感器打开,此时与置物侧x18传感器相连的ry1 继电器线圈得电,ry1继电器的常开触点闭合,此时合模继电器线圈得电,合模继电器的常开触点闭合,注塑机合模。对机械手的位置进行有效判断,判断其处于安全位置后合模,降低模具和机械手发生损坏的可能,从而有效避免经济损失的效果。
[0014]
综上所述,本实用新型具有以下有益效果:
[0015]
1.通过连接于机械手上的z轴上位传感器以及安装于机械手横行轴置物侧的置物侧x18传感器,以保障注塑机在机械手位于安全位置后合模,提高安全性;
[0016]
2.通过与第一继电器和ry1继电器串联的合模继电器,强化注塑机的合模条件;
[0017]
3.通过分别连接于机械手的两个手臂上的x00传感器以及x07传感器,在具有较高生产效率的同时降低损坏风险。
附图说明
[0018]
图1为本实用新型中用于传感器与继电器连接关系的电路图;
[0019]
图2为本实用新型中用于体现整体的电路图;
[0020]
图3为本实用新型中用于体现合模继电器的连接电路图。
[0021]
图中,1、z轴上位传感器;11、x00传感器;12、x07传感器;2、第一继电器;21、ry3继电器;22、ry2继电器;3、置物侧x18传感器;31、 ry1继电器;4、合模继电器;5、24v电源;6、ry5模组。
具体实施方式
[0022]
以下结合附图对本实用新型作进一步详细说明,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本实用新型的其他优点及功效。本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”等用语为便于叙述的明了,而非用以限定本实用新型可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本实用新型可实施的范畴。
[0023]
实施例:
[0024]
如图1所示,为本实用新型设计的一种机械手臂合模保护用安全回路系统,包括z轴上位传感器1以及置物侧x18传感器3,z轴上位传感器1 连接于机械手上,置物侧x18传感器3连接于机械手横行轴置物侧,z轴上位传感连接有第一继电器2,置物侧x18传感器3连接有ry1继电器31,第一继电器2与ry1继电器31并联。机械手由模具内移动至模具上方后, z轴上位传感器1打开,第一继电器2的线圈得电,第一继电器2的常开触点闭合,注塑机可以合模;机械手由模具内移动至模具外后,置物侧x18 传感器3打开,ry1继电器31线圈得电,ry1继电器31的常开触点闭合,注塑机可以合模。
[0025]
如图1至图3所示,第一继电器2、z轴上位传感器1、置物侧x18传感器3以及ry1继电器31共同组成ry5模组6,ry5模组6与合模继电器4 的一个常开触点相连,z轴上位传感器1包括x00传感器11和x07传感器 12,x00传感器11和x07传感器12分别安装于机械手的两个手臂上,第一继电器2包括ry2继电器22和ry3继电器21,ry3继电器21的一个常开触点与x00传感器11相连,ry2继电器22的一个常开触点与x07传感器12相连,ry2继电器22与ry3继电器21串联。
[0026]
如图1至图3所示,ry1继电器31、ry2继电器22和ry3继电器21均连接有24v电源5,x00传感器11、x07传感器12和置物侧x18传感器3 均从cn501接头处引出。ry1继电器31、ry2继电器22和ry3继电器21和合模继电器4均为中间继电器。
[0027]
上述实施例的实施原理为:两个机械手分别将两个注塑件由模具之间拿出后,当机械手由低处升至一定高度后,连接于机械手的两个手臂上的 x00传感器11和x07传感器12打开,此时分别与x00和x07传感器12相连的ry2继电器22和ry3继电器21线圈得电,ry2和ry3与x00和x07相连的常开触点闭合,此时合模继电器4线圈得电,合模继电器4的常开触点闭合,注塑机合模。当两个机械手平移至模具外后,置物侧x18传感器3 打开,此时与置物侧x18传感器3相连的ry1继电器31线圈得电,ry1继电器31的常开触点闭合,此时合模继电器4线圈得电,合模继电器4的常开触点闭合,注塑机合模。对机械手的位置进行有效判断,判断其处于安全位置后合模,降低模具和机械手发生损坏的可能,从而有效避免经济损失的效果。
[0028]
本具体实施例仅仅是对本实用新型的解释,其并不是对本实用新型的限制,本领域技术人员在阅读完本说明书后可以根据需要对本实施例做出没有创造性贡献的修改,但只要在本实用新型的权利要求范围内都受到专利法的保护。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips