
 商标分类
商标分类  商标转让
商标转让 
一种纤维复合材料用数控缠绕机的制作方法
 2021-02-22 12:02:56|
2021-02-22 12:02:56| 459|
459| 起点商标网
起点商标网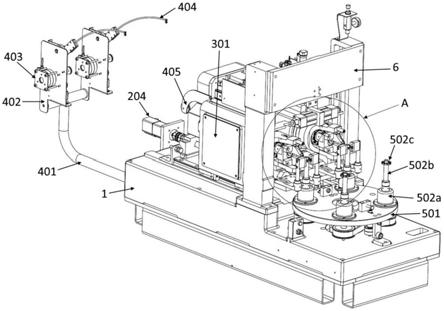
[0001]
本实用新型涉及一种绕卷轴装置,具体涉及一种纤维复合材料用数控缠绕机。
背景技术:
[0002]
纤维风管是一种由特殊纤维织成的柔性空气分布系统(air dispersion)即索斯风管,是替代传统送风管、风阀、散流器、绝热材料等的一种送出风末端系统。它是主要靠纤维渗透和喷孔射流的独特出风模式能均匀线式送风的送出风末端系统。这种系统又常常被叫做布风管、布袋风管、布质风管、纤维布风管等等熟称。作为一种送风装置,索斯系统的设计直接影响整个空间的送风效果、制冷、制热效果。
[0003]
现有技术中常见的椭圆风管的制造设备通常是将带缠绕元件放置在转盘上,然后依靠卷线机构对其进行缠绕,在缠绕的同时转盘一直转动,最终缠绕完成。这种制造设备虽然成本低廉,但生产效率太低、无法多工位协作进行。
技术实现要素:
[0004]
实用新型目的:提供一种纤维复合材料用数控缠绕机,以解决现有技术存在的上述问题。
[0005]
技术方案:一种纤维复合材料用数控缠绕机,包括滑台机构和缠绕驱动组件两部分。
[0006]
其中,滑台机构包括支撑座,一对相互平行固定在所述支撑座上的滑轨,滑动设置在所述滑轨上的双数个滑块,固定在所述支撑座的两端、且位于两滑轨之间的轴承座,配合插入所述轴承座的传动丝杆,固定在所述支撑座的一端、且与所述传动丝杆位于同一轴线上的伺服电机,以及套设在所述传动丝杆上、且与传动丝杆啮合传动的螺母块;
[0007]
缠绕驱动组件包括固定在所述支撑座上、且位于所述滑台机构一端的回转机构,滑动设置在所述滑台机构上的动力夹爪机构,呈圆周阵列排布在回转盘上的多个夹持工位,以及固定在所述滑台机构一侧的绕线机构。
[0008]
在进一步的实施例中,所述动力夹爪机构包括垫设并固定在所有滑块和螺母块上的动力箱,设置在所述动力箱内部的举升结构,固定在所述动力箱一侧的回转气缸,连接在所述回转气缸的输出端一侧的连接座,以及固定在所述连接座上的气动夹爪;所述连接座呈“u”型,所述气动夹爪包括一对相互联动的夹爪部;所述连接座上设有光电传感器。
[0009]
在进一步的实施例中,所述回转机构包括回转盘,以及固定在所述支撑座内用于驱动所述回转盘的回转气缸;所述回转气缸的回转轴与回转盘的回转轴通过联轴器连接;所述夹持工位包括通过螺栓锁紧在所述回转盘上的工位基座,所述工位基座为中空结构,内部安装有舵机,所述舵机的每个回转行程为90度,所述舵机的输出轴一端连接有工位支杆,用于缠绕纤维的工件套接在所述工位支杆上,所述舵机的输出轴上设有霍尔传感器,所述工位基座的内壁圆周处贴设有环状的磁芯。
[0010]
在进一步的实施例中,所述支撑座上、且位于所述滑台机构的两侧固定有h形的龙
门架,所述龙门架的两侧竖直部延伸出预定长度的可调支架,所述可调支架上安装有直线气缸,所述直线气缸的输出轴一端安装有l形的中转部,所述中转部的水平部分开设有半圆孔,该半圆孔与工件的轮廓匹配。
[0011]
在进一步的实施例中,所述绕线机构包括延伸出所述支撑座的延长杆,对称固定在所述延长杆一端两侧的安装板,固定在所述安装板一侧的直流电机,连接在所述直流电机的输出轴一侧、且位于安装板另一侧的主动盘,以及铰接在所述主动盘同侧的多个从动盘;所述动力箱靠近所述延长杆的一端安装有第一涨紧盘,所述连接座上还铰接有第二涨紧盘,所述的主动盘、从动盘、第一涨紧盘、第二涨紧盘的轴线方向均平行于滑台机构,纤维丝呈s形迂回绕设在主动盘、从动盘、第一涨紧盘、第二涨紧盘上。
[0012]
有益效果:本实用新型涉及一种纤维复合材料用数控缠绕机,通过滑台机构对动力夹爪机构进行水平方向的驱动,由动力夹爪机构的气动夹爪夹取工件,再由绕线机构对工件进行纤维丝的缠绕。本发明可同时具备多个工位,并多个工位同时进行工作,通过回转机构对夹持工位的位置进行调整,使其运动到预定位置,为了确保运动位置准确,在动力夹爪机构的连接座上设置光电传感器,由光电传感器感知工件位置。此外,回转机构同时具备工转和自转两种转动方式,由回转盘完成整体的工转以切换工位,由工位基座内的舵机完成自转,从而配合纤维丝的初步缠绕。舵机能够准确控制工位支杆的每个回转行程为90度,从而保证缠绕圈数恒定。
附图说明
[0013]
图1是本实用新型的整体结构示意图。
[0014]
图2是图1中a处的局部放大图。
[0015]
图3是动力夹爪机构的局部结构示意图。
[0016]
图中各附图标记为:支撑座1、滑轨201、滑块202、螺母块203、伺服电机204、传动丝杆205、动力箱301、导轨301a、手轮301b、锁紧扳手301c、锁紧块301d、第二锥齿轮301e、第一锥齿轮301f、丝杆301g、螺母301h、滑块301i、升降平台301j、过渡板301k、举升结构302、回转气缸303、连接座304、气动夹爪305、光电传感器306、延长杆401、安装板402、直流电机403、纤维丝404、第一涨紧盘405、从动盘406、主动盘407、回转盘501、夹持工位502、工位基座502a、工位支杆502b、工件502c、龙门架6、直线气缸601、可调支架602。
具体实施方式
[0017]
在下文的描述中,给出了大量具体的细节以便提供对本实用新型更为彻底的理解。然而,对于本领域技术人员而言显而易见的是,本实用新型可以无需一个或多个这些细节而得以实施。在其他的例子中,为了避免与本实用新型发生混淆,对于本领域公知的一些技术特征未进行描述。
[0018]
参照附图1-3,本实用新型公开了一种纤维复合材料用数控缠绕机,包括支撑座1、滑台机构、回转机构、动力夹爪机构、夹持工位502、绕线机构。所述支撑座1由多根型材搭建而成,所述滑台机构固定在所述支撑座1上,滑台机构包括滑轨201、滑块202、轴承座、传动丝杆205、伺服电机204、螺母301h块203,所述滑轨201为一对、且相互平行固定在所述支撑座1上,所述滑块202为双数个,所述滑块202滑动设置在所述滑轨201上,所述轴承座固定在
所述支撑做的两端、且位于两滑轨201之间,所述传动丝杆205配合插入所述轴承座,所述伺服电机204固定在所述支撑座1的一端、且与传动丝杆205位于同一轴线上,所述螺母301h块203套设在所述传动丝杆205上、且与传动丝杆205啮合传动。
[0019]
所述回转机构固定在所述支撑座1上,回转机构位于滑台机构的一端。所述回转机构包括回转盘501,以及固定在所述支撑座1内用于驱动所述回转盘501的回转气缸303;所述回转气缸303的回转轴与回转盘501的回转轴通过联轴器连接;所述夹持工位502包括通过螺栓锁紧在所述回转盘501上的工位基座502a,所述工位基座502a为中空结构,内部安装有舵机,所述舵机的每个回转行程为90度,所述舵机的输出轴一端连接有工位支杆502b,用于缠绕纤维的工件502c套接在所述工位支杆502b上。舵机的输出轴上设有霍尔传感器,所述工位基座502a的内壁圆周处贴设有环状的磁芯。
[0020]
所述动力夹爪机构滑动设置在所述滑台机构上,动力机构包括动力箱301、举升结构302、回转气缸303、连接座304、启动夹爪,所述动力箱301垫设并固定在所有滑块202和螺母301h块203上,所述举升结构302设置在所述动力箱301的内部,所述回转气缸303固定在动力箱301的一侧,所述连接座304连接在回转气缸303的输出端一侧,气动夹爪305固定在连接座304上。所述连接座304呈u形,所述气动夹爪305包括一对相互联动的夹爪部;所述连接座304上设有光电传感器306。
[0021]
所述举升结构302包括升降平台301j、直线轴承、滑轨201、偏心轮、铰接部、半圆齿轮,所述直线轴承固定在升降平台301j上,所述滑轨201插入直线轴承内、并沿其直线滑动,所述滑轨201上设有多个齿,所述偏心轮转动设置在升降平台301j上,所述铰接部铰接在升降平台301j上、且与所述偏心轮回摆传动,所述铰接部的一段为设有条型槽的连杆、一段为设有预定弧度与齿数的半圆齿轮,所述半圆齿轮与所述滑轨201上的多个齿啮合传动;所述过渡板301k固定安装在所述滑轨201上。
[0022]
所述支撑座1上、且位于所述滑台机构的两侧固定有h形的龙门架6,所述龙门架6的两侧竖直部延伸出预定长度的可调支架602,所述可调支架602上安装有直线气缸601,所述直线气缸601的输出轴一端安装有l形的中转部,所述中转部的水平部分开设有半圆孔,该半圆孔与工件502c的轮廓匹配。
[0023]
所述夹持工位502固定在回转机构的转动盘上,绕线机构固定在滑台机构的一侧,所述夹持工位502呈圆周阵列排布在回转盘501上。绕线机构包括延长杆401、安装板402、直流电机403、主动盘407、从动盘406,所述延长杆401延伸出支撑座1,安装板402对称固定在延长杆401的一端两侧,直流电机403固定在安装板402的一侧,主动盘407连接在直流电机403的输出轴一侧、且位于安装板402的另一侧,多个从动盘406铰接在主动盘407的同侧。动力箱301靠近所述延长杆401的一端安装有第一涨紧盘405,所述连接座304上还铰接有第二涨紧盘,所述的主动盘407、从动盘406、第一涨紧盘405、第二涨紧盘的轴线方向均平行于滑台机构,纤维丝404呈s形迂回绕设在主动盘407、从动盘406、第一涨紧盘405、第二涨紧盘上。
[0024]
基于上述结构与连接关系,本发明的工作过程如下:首先,人为将被缠绕的工件502c放置在夹持工位502的工位支杆502b上,放满所有工位后即可开始下一工序;按下启动按钮触发传动组件工作:回转盘501开始回转,由回转气缸303带动回转盘501转动预定角度,以使得其中一个夹持工位502正对其中一个气动夹爪305;夹持工位502运动到位后,由
动力夹爪机构上的光电传感器306感知当前的被缠绕工件502c是否到位,若判断到位后则气动夹爪305开始工作:滑台机构上的伺服电机204启动,驱动动力夹爪机构水平滑至被缠绕工件502c前方,气动夹爪305抓取工件502c后由举升结构302带动气动夹爪305抬起使得工件502c脱离工位支杆502b;接着,绕线机构启动,由直流电机403驱动主动盘407转动,由于纤维丝404呈s形迂回绕设在主动盘407、从动盘406、第一涨紧盘405、第二涨紧盘上,故当主动盘407转动后带动纤维丝404从气动夹爪305上方的第二涨紧盘伸出,最终缠绕在工件502c上,在纤维丝404伸出的同时回转气缸303带动连接座304进而带动气动夹爪305转动,从而将纤维丝404顺利缠绕在工件502c上;工件502c缠绕完毕后位于滑台机构两侧的龙门架6上的直线气缸601启动,推动中转部沿水平方向移动,与此同时举升结构302也带动动力夹爪机构整体上移,使得气动夹爪305运动至中转部的正前方,到位后松开气动夹爪305,使得完成缠绕的工件502c落在中转部的水平部分上,最终再由直线气缸601推动工件502c移出设备。
[0025]
如上所述,尽管参照特定的优选实施例已经表示和表述了本实用新型,但其不得解释为对本实用新型自身的限制。在不脱离所附权利要求定义的本实用新型的精神和范围前提下,可对其在形式上和细节上做出各种变化。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips