
 商标分类
商标分类  商标转让
商标转让 
投影微立体光刻技术中控制尺寸的方法与流程
 2021-02-21 14:02:58|
2021-02-21 14:02:58| 383|
383| 起点商标网
起点商标网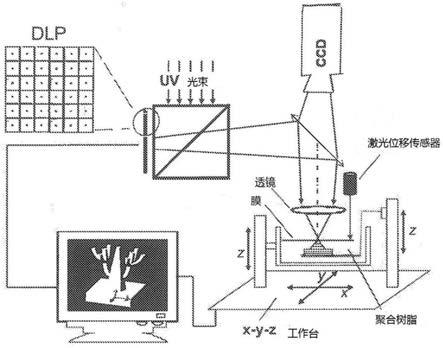
投影微立体光刻技术中控制尺寸的方法
[0001]
技术领域
[0002]
本发明为控制彼此相对的表面的位置提供了改进方法,例如在10微米公差内建立平行表面。该方法可以精确地控制3d打印技术(例如投影微立体光刻)中的尺寸。尤其是控制打印方向上的尺寸精度。这里发明的方法不限于这种3d打印方法,它也适用于使用透明硬窗或膜的任何其他类型的方法。
背景技术:
[0003]
立体光刻技术最初被认为是一种快速成型技术。 快速原型是指一系列技术,这些技术可用于直接从计算机辅助设计(cad)r以更快的速度创建生产部件的真实比例模型。 自从其在美国专利4,575,330中公开以来,立体光刻技术已极大地帮助工程师可视化复杂的三维零件几何形状,检测原型示意图中的错误,测试关键部件以及以相对较低的成本和更快的时间范围验证理论设计。
[0004]
立体光刻技术最初被认为是一种快速成型技术。 快速原型指的是一系列技术,这些技术可用于以快速(比以前更快)的方式直接从计算机辅助设计(cad)创建生产组件的真实比例模型。 自从其在美国专利4,575,330中公开以来,立体光刻技术已极大地帮助工程师可视化复杂的三维零件几何形状,检测原型示意图中的错误,测试关键部件以及以相对较低的成本和比以前更快的时限验证理论设计。
[0005]
在过去的几十年中,对微机电系统(mems)领域的不断投资导致了微立体光刻(pμsl)的出现,它继承了传统立体光刻的基本原理,但具有更高的空间分辨率。例如k ikuta和k. hirowatari,“使用立体平版印刷术和金属模制进行真正的三维微制造”,1993年第六届ieee微电子机械系统研讨会,借助单光子聚合和双光子聚合技术的辅助,微立体光刻的分辨率进一步增强到了小于200nm;例如s.maruo和k.ikuta,“通过使用单光子吸收的聚合进行三维微加工”,appl.phys. lett., vol.76, 2000;s. maruo和s. kawata,“用于三维微制造的两光子吸收的近红外光聚合”,j. mems, vol.7, pp.411,1998;s. kawata, h. b. sun, t. tanaka and k. takada,
ꢀ“
功能微设备的细化特征”,《自然》,412卷,第697页,2001。
[0006]
bertsch等人的投影微立体光刻术(pμsl)的发明极大地提高了速度。“使用液晶显示器作为动态掩模发生器的微立体光刻术”,microsystem technologies,p42-47,1997年; beluze等人,“微立体光刻技术:构建复杂3d对象的新工艺,mem / moem的设计,测试和微加工专题讨论会”,spie会议论文集,v3680,n2,p808-817,1999。 这项技术的核心是高分辨率空间光调制器,它可以是液晶显示器(lcd)面板或数字光处理(dlp)面板,它们均可从微型显示器行业获得。
[0007]
3d打印需要高水平的平面内和平面外分辨率。 在pμsl的图像聚焦平面中,平面分辨率由微型显示芯片的物理像素大小和光学引擎光学元件决定。 当前市场上几乎所有基
于dlp的3d打印机都具有50-100微米的面内分辨率。 平面外分辨率(层厚度)取决于机械结构,例如电机平台,通常在十分之一微米以内。
[0008]
当尺寸精度接近几微米时,可以使用优质的光学透镜实现面内分辨率,dlp / lcd像素尺寸已经小于10微米,并且高分辨率电动平台可支持面外精度。 但是,精确控制打印样品的前几层的厚度仍然是一个很大的挑战,因此,打印方向上的尺寸精度很少小于10微米,通常约为100微米。 这在很大程度上是因为机械加工和组装的精度通常超过10微米。
[0009]
pμsl中有三种类型的树脂层定义方法。 一种使用自由表面,其中层厚度由树脂自由表面与样品台之间的距离定义。 对第一层的控制取决于树脂表面和平台的精确定位。当前技术一般通过打印透镜聚焦来监控,并将两个表面移动到同一透镜的聚焦平面。然而,透镜的聚焦深度为100微米或更大的数量级,因此第一层的厚度的误差可达到100微米或更大。 第二种和第三种方法使用透明膜或硬窗。对于这两种情况,目前都没有一种相对于样品台来定位膜或硬窗,使误差小于10微米的方法。尤其是对于膜盒,因为推膜已不再是一种好的选择。
[0010]
尽管pμsl技术已经成功地实现了具有良好分辨率的快速制造速度,但仍需要进一步的改进。 在许多技术中,多层对齐精度和尺寸的精度都非常重要。 例如,在pμsl系统(图1)中,对于所有层来说,在层厚度和方向上具有高精度和均匀性非常重要,以便打印的样本可以精确地代表实际的cad模型。
技术实现要素:
[0011]
本发明提供了更精确地控制相对于彼此的两表面的位置的方法,例如平行表面,通常精度可在10微米的公差范围内。 在一个实施方案中,本发明的方法,以明确界定的距离,精确地建立了两个基板的表面平行关系。 在一些实施例中,会倾向选择一个基板是透明的,例如光学透明的。该方法可以大大提高使用pμsl打印的样品的尺寸精度。但在许多其它实施案例中,表面的对准的要求很高,尤其在其中一个或多个表面是透明基板的一部分的情况下。
[0012]
在本发明的一个实施例中,位移传感器用于帮助两个或更多个基板的两个表面相对于彼此对齐。例如,使一个基板的表面与另一个基板上的表面平行对齐,并精确控制两个或多个基板表面之间的间隔或距离。 在另一个实施例中,使用牺牲树脂来使表面精确地平行于第二基板,该牺牲基板可以使用蚀刻溶液轻松去除。
[0013]
例如,在许多实施例中,本发明利用一种系统,该系统包括:i)具有光轴的透镜; ii)能够执行或协助执行自动聚焦程序的电荷耦合器件(ccd);以及iii) 具有发射向量的位移传感器。 该系统相对于基板的表面布置,使得透镜位于基板的表面和ccd之间,透镜的光轴与该表面相交,ccd可以沿光轴通过透镜聚焦,并且位移传感器的发射向量平行于光轴。
[0014]
平面可以由不在同一条线上的三个点定义,即,三个点定义的角度不是0或180度。 基于此,通过选择第一基板表面上的三个非线性点,依次将每个点与位移传感器的发射向量对齐。测量位移传感器与三个选定的非线性点中的每一个之间的距离,并调整基板,以使位移传感器与三个选定的非接触点中的每个之间的距离相同,请参见图2。
[0015]
将第二基板放置在水平第一表面和位移传感器之间,在第二基板面对透镜和位移
传感器的表面上选择三个非线性点,并进行调整基板的过程,以使位移传感器与每个选定点之间的距离相同,从而提供两个平行表面。
[0016]
可以选择任一表面上三个以上的点,并测量到位移中心的距离,但仅有三个点是必须。保证所选点之间的最小距离至少为1 cm 从而可提供出色的精度。
[0017]
如图3所示,由透镜,ccd和位移传感器组成的同一系统还可用于精确定义第一基板的表面和第二基板的表面之间的距离。通常,系统使用ccd运行自动聚焦协议,将第一表面放置在聚焦平面上,然后通过激光位移传感器读取第一基板表面的位置。将第二基板放置在适当的位置,激光位移传感器用于帮助将第二基板定位在距第一基板表面所需距离的位置。
[0018]
当使用高精度的位移传感器(例如激光位移传感器或其他类型的位移传感器,精度在10微米以内)时,可获得最佳结果。这样的传感器是可购买到的的,例如,来自keyence的激光位移传感器检测10微米或更小的位移。
[0019]
在一个实施例中,所有步骤均以上面列出的顺序运行。但是在其他实施例中,步骤可以重复或不按所列顺序运行。 例如,可以根据需要重复与建立平行表面有关的全部或部分步骤,并且可以配置在建立第一基板的表面之间的距离的步骤中。
[0020]
在其他实施例中,例如在提供与膜或硬窗平行且相切的3d打印样品台表面时,使用牺牲树脂来使表面与第二基板精确地平行且相切。 (图4)。例如,在一个实施方案中,通过提供可固化的树脂来填充样品台和水平基板(例如膜或硬窗)之间的间隙来制备可用于3d打印的样品台。通过光,热或其他方式使树脂固化,以产生牺牲聚合物表面,该表面以一定距离平行于水平基板。在打印时,牺牲树脂可以使用蚀刻溶液去除。
附图说明
[0021]
图1是具有激光位移传感器的投影微立体光刻系统的示意图。
[0022]
图2显示了在pμsl系统中使用激光位移传感器来平整样品台的步骤。
[0023]
图3显示了用于精确定义pμsl系统中第一层厚度的操作。
[0024]
图4显示了通过创建牺牲基底来控制3d打印样品尺寸的步骤。
具体实施方式
[0025]
在本发明的一个实施例中,该方法由位移传感器辅助,例如作为上述透镜/ ccd /位移系统的一部分。 通常,位移传感器是激光位移传感器,但是也可以使用精度在10微米或更小范围内的任何其他类型的位移传感器。 这种位移传感器是可购买到的。例如,来自keyence的激光位移传感器检测10微米或更小的位移。
[0026]
位移传感器有两个作用。一种是将一个表面与另一个表面平行对齐。例如,本文的方法可以用作pμsl印刷过程的一部分,以建立平行于样品台表面的无树脂表面,膜或硬窗。如图2所示,对于pμsl打印系统,在样品台表面上选择了三个非线性点(此处形成了直角三角形),并通过移动x-y工作台与位移传感器发射向量顺序对齐。两点之间的最小距离应保证良好的精度。调整样品台,以确保位移传感器与每个点之间的距离读数相同。由于位移传感器的发射向量平行于透镜的光轴,对系统进行适当的控制将可以提供一个垂直于位移传感器的发射向量和透镜光轴的载物台表面。
[0027]
然后将膜或硬窗放置在位移传感器和样品台之间,并使用膜或硬窗表面上的三个选定点来平整膜,重复上述过程。 同样,对系统进行适当控制便很容易提供一个垂直于光轴的表面,从而确保两个表面平行。
[0028]
激光位移传感器的第二个目的是精确定义基板或表面之间的距离。 在进行3d打印时,例如在图3的pμsl系统中,样品台表面与膜或硬窗之间的距离将决定pμsl系统中第一层的厚度,如图3所示。
[0029]
为了定义基板或表面之间的距离,系统使用ccd运行自动聚焦程序,请参见图3,以将样品台放置在聚焦平面上。 然后,激光位移传感器读取样品台表面的位置。再将第二基板(例如膜或硬窗)放置在适当的位置。激光位移传感器将帮助将膜或硬窗移动到期望的距离。在进行3d打印时,样品台与膜或硬窗之间的距离将等于输送到样品台的第一层的厚度。 两层之间的距离的控制不会比位移传感器的误差更精确,优选高精度的激光位移传感器(比如可精确到10微米或更小)为佳。
[0030]
在如上所述的过程中,形成了垂直于光轴的两个表面,这样的设置对于3d打印是理想的。 承载目标表面的基板可以移动,以使三个点依次与固定的位移传感器对齐。对于打印系统中样品台的表面(例如本图中所示的表面),可以通过在x-y方向上移动表面来完成此操作。
[0031]
在一些实施例中,可以将位移传感器移动到与所选点对齐的各个位置以进行测量。 在这些情况下,如果用于在第一表面上进行测量的传感器位置位于第一公共平面中,并且用于在第二表面上进行测量的传感器位于第一公共平面或与第一平面平行的第二公共平面中,则这些表面将平行。
[0032]
还可以设想使用本发明的透镜/ ccd /位移系统来建立不垂直于光轴的平行表面。
[0033]
在特定实施例中,本发明提供了一种用于相对于第二基板(透明基板,例如膜或硬窗)的表面,定位第一基板(例如用于立体光刻(3d打印)装置的样品台)的第一表面的方法。 其中第二基板是透明的,该方法包括:a)定位第一基板和系统,该系统包括:i)具有光轴的透镜; ii)能够执行或协助执行自动聚焦程序的电荷耦合(ccd),以及iii)具有发射向量的位移传感器 ,以使透镜位于第一基板的表面和ccd之间,透镜的光轴与第一基板的表面相交,位移传感器具有平行于光b)依次将第一基板表面上的三个非线性点与位移传感器的发射向量对齐,在每个选定点测量位移传感器与表面之间的距离。调整基板,使位移传感器与三个点之间的距离相同,c)将第二基板放置在第一基板和位移传感器之间,将第二基板表面上的三个非线性点与位移传感器的发射向量依次对齐,并测量位移传感器与每个选择点表面的距离。调整基板,使位移传感器与三个点中的每个点之间的距离相同,从而生成平行表面。
[0034]
在适当的情况下,可以以任何顺序将以下本发明的用于建立两个表面之间的距离的方法并入上述方法中:aa)使用ccd执行自动聚焦程序,以使第一基板的表面位于透镜的焦平面,然后用位移传感器读取第一表面的位置,ab)将第二基板放置在透镜和第一基板之间,使得表面与透镜的光轴相交,并且定位第二基板。使得第二基板的表面与第一基板的表面之间的距离等于位移传感器测量的既定距
离。
[0035]
当该方法是打印过程的一部分时,基板之间的间隙通常用于限定第一印刷层的厚度。 例如,如果是图1的打印系统的一部分,则上述过程的下一步可能是将树脂罐填充到适当的高度并开始打印。
[0036]
在一个实施例中,第一基板是用于3d打印设备的样品台,第二基板是透明的,例如透明膜或硬窗。
[0037]
在一些实施例中,ccd是激光ccd,例如激光ccd照相机。
[0038]
在一些实施例中,位移传感器是激光位移传感器,具有10微米的精度。通常透镜是投影透镜。
[0039]
在一个实施例中,将第一和第二层之间的距离控制在20微米或更小的公差内,例如,将第一和第二层之间的距离控制在10微米或更小的公差内。
[0040]
在许多实施例中,第一基板和第二基板之间的距离等于3d打印过程的厚度或第一层。
[0041]
在许多实施例中,第一基板是用于3d打印的样品台,第二基底包括膜或硬窗。通常将样品台和膜或硬窗放置在树脂罐中,并且在此类实施例中,该方法通常还包括以下步骤:在将第一层和第二层相对放置后,将可固化树脂倒入到树脂罐中达到膜或硬窗的水平高度。
[0042]
本发明的一个替代实施例,使用牺牲树脂来制备这样一个表面。这个表面不仅精确平行于且第二基板或表面,且与之相切。此方法对3d打印来说是一种有用的方法,请参见图4。
[0043]
图4所示,在印刷之前,例如从样品台的中央通道输送牺牲树脂,以完全填充膜/硬窗与样品台之间的间隙。在使用光反应牺牲树脂的情况下,缝隙间的树脂利用紫外光进行聚合;或者在使用热固话树脂的情况下,缝隙中的树脂则利用热量来聚合,从而为3d打印提供一个以牺牲树脂为基底的样品台。
[0044]
由于制备方法的原因,基底将完全平行于膜/硬窗,并处于精确已知的距离。 应当控制牺牲性基底和膜/硬窗之间的粘附力,以使基底与膜/硬窗良好分离。例如,控制交联密度。 样品将从牺牲性基底和膜/硬窗的界面打印。可以布置打印设备,以便在打印整个样品时将其浸入蚀刻溶液中,该蚀刻溶液将去除牺牲性基底并释放样品。
[0045]
蚀刻溶液的类型取决于牺牲树脂。 在一个实例中,使用包含n,n-二甲基丙烯酰胺(cas:2680-03-7)和1重量%-3重量%的irgacure 819(cas 162881-26-7)光引发剂的混合物的树脂作为牺牲树脂。 固化后,可将光交联的聚合物以100-300 um / h的蚀刻速率溶于水或酸(ph值≥4)缓冲溶液中。 也可以将聚乙二醇(mw <600)或水添加到光敏树脂中,以增加聚合物的孔隙率,从而增加蚀刻速率。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除

 热门咨询
热门咨询




tips