
 商标分类
商标分类  商标转让
商标转让 
电梯的使用者探测系统的制作方法
 2021-02-20 05:02:06|
2021-02-20 05:02:06| 348|
348| 起点商标网
起点商标网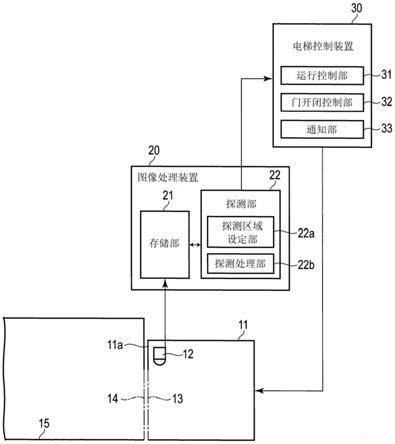
电梯的使用者探测系统
[0001]
本申请以日本专利申请2019-147519(申请日:8/9/2019)为基础,基于该申请而享有优先权。本申请通过参照该申请,包括该申请的全部内容。
技术领域
[0002]
本发明的实施方式涉及电梯的使用者探测系统。
背景技术:
[0003]
近年来,为了防止人或物体被电梯的轿厢门夹住,提出了各种技术。例如,提出了使用摄像机探测位于电梯附近的使用者并实施该电梯的门的门开闭控制的技术。
[0004]
在这样的技术中,需要根据由摄像机拍摄的图像高精度地探测位于电梯附近的使用者,期望提高该探测精度。
技术实现要素:
[0005]
本发明的实施方式要解决的课题是提供一种电梯的使用者探测系统,其能够根据由摄像机拍摄的图像高精度地探测位于电梯附近的使用者。
[0006]
根据一实施方式,电梯的使用者探测系统具备:拍摄单元,其设置在乘用轿厢的门附近,拍摄包含乘用轿厢内和候梯厅的图像;设定单元,其在所述拍摄的图像上设定多个用于探测人或物体的探测区域,对设定的多个所述探测区域的每一个设定不同的探测灵敏度;探测单元,其对设定的所述探测区域的每一个执行用于探测所述人或物体的探测处理;以及控制单元,其将所述探测处理的结果反映到所述乘用轿厢的门的门开闭控制中。
[0007]
根据上述构成的电梯的使用者探测系统,能够根据由摄像机拍摄的图像高精度地探测位于电梯附近的使用者。
附图说明
[0008]
图1是表示实施方式的电梯的使用者探测系统的构成的图。
[0009]
图2是表示以块为单位划分该实施方式中的拍摄图像的状态的图。
[0010]
图3是表示该实施方式中的探测处理的流程的流程图。
[0011]
图4是表示该实施方式中的乘用轿厢内的出入口周边部分的构成的图。
[0012]
图5是用于说明该实施方式中的探测区域的设定的图。
[0013]
图6是表示该实施方式中的电梯的使用者探测系统的主要处理流程的流程图。
[0014]
图7是表示该实施方式中的第1对应处理的流程的流程图。
[0015]
图8是表示该实施方式中的第2对应处理的流程的流程图。
[0016]
图9是表示该实施方式中的设定值信息的数据结构的一例的图。
[0017]
图10是用于说明该实施方式中的电梯的使用者探测系统的优点的图。
具体实施方式
[0018]
以下,参照附图说明实施方式。
[0019]
另外,公开只不过是一个例子,本发明不受以下实施方式中记载的内容的限定。本领域技术人员能够容易想到的变形当然包含在公开的范围内。为了使说明更加明确,在附图中,有时将各部分的尺寸、形状等相对于实际的实施方式进行变更而示意地表示。在多个附图中,对对应的要素标注相同的参照符号,有时省略详细的说明。
[0020]
图1是表示一实施方式的电梯的使用者探测系统的构成的图。另外,在此以1台乘用轿厢为例进行说明,但即使是多台乘用轿厢也是同样的构成。
[0021]
在乘用轿厢11的出入口上部设置有摄像机12。具体而言,摄像机12在覆盖乘用轿厢11的出入口上部的门楣板11a中以镜头部分朝向正下方向或朝向候梯厅15的方向的方式设置。摄像机12是例如车载摄像机等小型的监视用摄像机,具有广角镜头,以180度以上的视场角在大范围内拍摄包含乘用轿厢11内和候梯厅15的拍摄对象。摄像机12能够在1秒内连续拍摄几帧(例如,30帧/秒)的图像。
[0022]
在各层的候梯厅15中,在乘用轿厢11的到达口开闭自如地设置有候梯厅门14。在乘用轿厢11到达时候梯厅门14与轿厢门13卡合而进行开闭动作。另外,动力源(门机)位于乘用轿厢11侧,候梯厅门14只是追随轿厢门13进行开闭。在以下的说明中,轿厢门13打开时候梯厅门14也打开,轿厢门13关闭时候梯厅门14也关闭。
[0023]
由摄像机12连续拍摄的各图像(影像)由图像处理装置20实时地进行解析处理。另外,在图1中,为了方便起见,将图像处理装置20从乘用轿厢11中提出表示,但实际上,图像处理装置20与摄像机12一起被收纳在门楣板11a中。
[0024]
图像处理装置20具备存储部21和探测部22。存储部21依次保存由摄像机12拍摄的图像,并且具有暂时保存探测部22的处理所需的数据用的缓冲区域。另外,在存储部21中,也可以保存作为对拍摄图像的前处理而实施了畸变校正、放大缩小、部分切取等处理的图像。
[0025]
探测部22使用摄像机12的拍摄图像,对位于乘用轿厢11内或候梯厅15的使用者进行探测。在功能上区分该探测部22时,由探测区域设定部22a和探测处理部22b构成。
[0026]
探测区域设定部22a在摄像机12的拍摄图像上设定用于对使用者(使用电梯的人)或物体进行探测的至少2个以上的探测区域。这里所说的“物体”包括例如使用者的衣服、物品、以及轮椅等移动体。进而,还包括例如轿厢内的操作按钮、灯、显示设备等与电梯设备相关的设备类。另外,关于探测区域的详细情况将在后面叙述,因此在此省略其详细说明。
[0027]
探测处理部22b按照由探测区域设定部22a设定的每个探测区域执行对人或物体(的运动)进行探测的探测处理。具体而言,如图2所示,探测处理部22b将由摄像机12拍摄的图像划分为一定尺寸的块,着眼于各块的亮度值的变化,对人或物体(的运动)进行探测。在图2所示的一个块中包含构成拍摄图像的多个像素。
[0028]
在此,参照图3的流程图对由探测处理部22b执行的探测处理进行说明。
[0029]
探测处理部22b一张一张地读出保存在存储部21中的拍摄图像,在将读出的拍摄图像划分为一定尺寸的块后,计算每个块的平均亮度值(即,块中包含的多个像素的亮度值的平均)(步骤s1)。此时,探测处理部22b将读出最初的图像时计算出的每个块的平均亮度值作为初始值保存在存储部21内的缓冲区域中(步骤s2)。
[0030]
当获得第2张及后续图像时,探测处理单元22b将当前图像的每个块的平均亮度值与保持在上述的缓冲区域中的前一图像的每个块的平均亮度值进行比较(步骤s3)。其结果是存在具有预先设定的阈值以上的亮度差的块的情况下,探测处理部22b将该块视为有运动的块,判定为在该块部分中探测到人或物体(的运动)(步骤s4)。
[0031]
在以当前图像为对象的人或物体的探测完成时,探测处理部22b将该当前图像的每个块的平均亮度值作为与下一图像的比较用而写入上述的缓冲区域(步骤s5),结束一系列的探测处理。
[0032]
这样,探测处理部22b着眼于由摄像机12拍摄的图像中的每块的平均亮度值,在连续的2张图像中存在平均亮度值变化了预先设定的阈值以上的块的情况下,探测到在该块部分有人或物体的情况。
[0033]
另外,图像处理装置20的一部分或全部的功能也可以搭载在后述的电梯控制装置30中。
[0034]
电梯控制装置30对设置在乘用轿厢11中的各种设备类(目的楼层按钮、照明等)的动作进行控制。另外,电梯控制装置30具备运转控制部31、门开闭控制部32和通知部33。运转控制部31进行乘用轿厢11的运转控制。通知部33根据探测处理部22b的探测结果,唤起乘用轿厢11内的使用者的注意。
[0035]
门开闭控制部32控制乘用轿厢11到达候梯厅15时的轿厢门13的门开闭。详细地说,门开闭控制部32在乘用轿厢11到达p15时打开轿厢门13,在经过规定时间后关闭门。
[0036]
在此,例如在轿厢门13的开门动作开始前或开门动作中由探测处理部22b探测到人或物体的情况下,门开闭控制部32进行用于避免门事故(被拉入门暗箱的事故)的门开闭控制。具体而言,门开闭控制部32进行暂时停止轿厢门13的开门动作、或向反方向(关门方向)移动、或减慢轿厢门13的开门速度等的门开闭控制。另外,例如在轿厢门13的关门动作开始前(全开中)或关门动作中由探测处理部22b探测到人或物体的情况下,门开闭控制部32进行用于避免门事故(被门夹住的事故)的门开闭控制。具体而言,门开闭控制部32进行暂时停止轿厢门13的关门动作、或向反方向(开门方向)移动、或减慢轿厢门13的关门速度等的门开闭控制。
[0037]
图4是表示乘用轿厢11内的出入口周边部分的构成的图。
[0038]
在乘用轿厢11的出入口开闭自如地设有轿厢门13。在图4的例子中,示出了两扇门对开型的轿厢门13,使构成轿厢门13的两扇门板13a、13b沿着面宽方向(水平方向)相互向相反方向进行开闭动作。另外,所谓“面宽”与乘用轿厢11的出入口相同。
[0039]
在乘用轿厢11的出入口的两侧设有正面柱41a、41b,该正面柱41a、41b与门楣板11a一起包围乘用轿厢11的出入口。“正面柱”也称为出入口柱或出入口框,一般在里侧设有用于收纳轿厢门13的门暗箱。在图4的例子中,在轿厢门13开门时,一方的门板13a被收纳在设置于正面柱41a的里侧的门暗箱42a中,另一方的门板13b被收纳在设置于正面柱41b的里侧的门暗箱42b中。
[0040]
在正面柱41a、41b的一方或双方设置有显示器43、配设有目的楼层按钮44等的操作盘45、扬声器46。在图4中,示出了在正面柱41a上设置有扬声器46,在正面柱41b上设置有显示器43和操作盘45的情况。
[0041]
在此,在乘用轿厢11的出入口上部的门楣板11a的中央部设置有具有广角镜头的
摄像机12。
[0042]
图5是表示摄像机12的拍摄图像的一例的图。在图5中,表示在轿厢门13(门板13a、13b)和候梯厅门14(门板14a、14b)全开的状态下,从乘用轿厢11的出入口上部以180度以上的视场角拍摄乘用轿厢11内和候梯厅15的情况。图5中的上侧表示候梯厅15,下侧表示乘用轿厢11内。以下,将轿厢门13的开闭方向称为x方向,将与轿厢门13的开闭方向垂直的方向称为y方向,将乘用轿厢11的高度方向称为z方向来进行说明。
[0043]
在候梯厅15中,在乘用轿厢11的到达口的两侧设有门套17a、17b,在该门套17a、17b之间的地板面16上沿候梯厅门14的开闭方向配设有具有规定宽度的带状的候梯厅门槛18。另外,在乘用轿厢11的地板面19的出入口侧沿着轿厢门13的开闭方向配置有具有规定宽度的带状的轿厢门槛47。
[0044]
在此,针对拍摄图像中所映出的乘用轿厢11内和候梯厅15,设定用于探测人或物体的探测区域e1~e4。
[0045]
探测区域e1是用于事先对开门动作中的使用者被拉入向门(门暗箱)的情况进行探测(防止)的区域,被设定在正面柱41a、41b的内侧侧面41a-1、41b-1和正面柱41a、41b附近的乘用轿厢11的地板面19。以下,将探测区域e1称为被拉入探测区域e1进行说明。
[0046]
具体而言,如图5所示,被拉入探测区域e1-1、e1-2在正面柱41a、41b的内侧侧面41a-1、41b-1的宽度方向上具有规定的宽度d1、d2而设定为带状。上述宽度d1、d2例如被设定为与内侧侧面41a-1、41b-1的横向宽度(短边方向的宽度)相同或比其稍小。上述宽度d1、d2可以相同,也可以不同。另外,被拉入探测区域e1-1、e1-2被设定到距离地板面19高度h1、h2的位置。高度h1、h2是任意的值,高度h1、h2可以相同,也可以不同。
[0047]
被拉入探测区域e1-1、e1-2例如是用于对与正面柱41a、41b的内侧侧面41a-1、41b-1接触的使用者的手或手臂进行探测的区域。
[0048]
另外,如图5所示,被拉入探测区域e1-3在乘用轿厢11的地板面19上具有规定的宽度d3而被设定为带状。上述宽度d3可以与上述宽度d1、d2相同,也可以不同。另外,被拉入探测区域e1-3被设定为在与上述宽度d3正交的x方向上具有规定的宽度w1。上述的宽度w1被设定为与轿厢门13的出入口的横向宽度相同或者比其稍小。
[0049]
被拉入探测区域e1-3是例如用于对与轿厢门13接触的使用者的手或手臂、接近轿厢门13的使用者等进行探测的区域。
[0050]
探测区域e2是用于对位于候梯厅门槛18和轿厢门槛47上的使用者或物体进行探测的区域,被设定为候梯厅门槛18和轿厢门槛47。以下,将探测区域e2称为门槛上探测区域e2进行说明。
[0051]
具体而言,如图5所示,门槛上探测区域e2在候梯厅门槛18和轿厢门槛47上被设定为在x方向上具有规定的宽度w2、在y方向上具有规定的距离l1。上述宽度w2被设定为与轿厢门13的出入口的横向宽度相同或比其稍小。另外,上述距离l1被设定为与候梯厅门槛18的y方向的距离和轿厢门槛47的y方向的距离之和相同或者比其稍小。
[0052]
门槛上探测区域e2是用于对例如连接宠物的牵引绳等从乘用轿厢11内延伸到候梯厅15的物体等进行探测的区域。
[0053]
探测区域e3是用于对在候梯厅15中接近乘用轿厢11的地方的人或物体进行探测的区域,被设定在候梯厅15的乘用轿厢11的出入口附近。以下,将探测区域e3称为接近探测
区域e3进行说明。
[0054]
具体而言,如图5所示,接近探测区域e3被设定为从乘用轿厢11的出入口向候梯厅15的方向(y方向)上具有规定的距离l2。接近探测区域e3的形状可以是具有与轿厢门13的出入口的宽度同等或大于该宽度的x方向的宽度的矩形,也可以是从该矩形中除去了门套17a、17b的死角的梯形。图5表示接近探测区域e3的形状为梯形的情况。
[0055]
探测区域e4是用于对从候梯厅15朝乘用轿厢11接近过程中的使用者或物体进行探测的区域,其被设定于候梯厅15。以下,将探测区域e4称为乘梯意图推断区域e4来进行说明。
[0056]
具体而言,如图5所示,乘梯意图推断区域e4被设定在比设定接近探测区域e3的位置更远离轿厢门13的候梯厅15的地板面上。乘梯意图推定区域e4的形状可以是具有与轿厢门13的出入口的宽度同等或者大于该宽度的x方向的宽度的矩形,也可以是从该矩形中除去了门套17a、17b的死角的梯形。图5表示乘梯意图推断区域e4的形状是梯形的情况。另外,在此设想乘梯意图推断区域e4与接近探测区域e3分开设定的情况,但乘梯意图推断区域e4也可以包含接近探测区域e3而设定。在这种情况下,乘梯意图推断区域e4被设定为从乘用轿厢11的出入口向候梯厅15的方向(y方向)上具有预定的距离l3(l3>l2)。
[0057]
乘梯意图推断区域e4是对该区域内的人或物体进行探测、并且对该探测到的人或物体是否从候梯厅15接近乘用轿厢11进行探测的区域。
[0058]
上述的各探测区域e1~e4的尺寸和形状可以固定为上述的尺寸和形状,也可以与轿厢门13的门开闭动作对应地动态地变更。
[0059]
另外,在权利要求书中,被拉入探测区域e1被称为第1探测区域,门槛上探测区域e2被称为第4探测区域,接近探测区域e3被称为第2探测区域,乘梯意图推断区域e4被称为第3探测区域。
[0060]
接着,说明本系统的主要动作。
[0061]
图6是表示本系统中的整体处理的流程的流程图。
[0062]
首先,作为初始设定,由图像处理装置20所具备的探测部22的探测区域设定部22a执行探测区域设定处理(步骤s11)。该探测区域设定处理例如在设置摄像机12时或者调整摄像机12的设置位置时执行。
[0063]
根据探测区域设定处理,在由摄像机12拍摄的图像上设定图5所示的多个探测区域e1~e4。如上所述,被拉入探测区域e1-1、e1-2被设定在正面柱41a、41b的内侧侧面41a-1、41b-1和乘用轿厢11的地板面19。另外,门槛上探测区域e2被设定在候梯厅门槛18和轿厢门槛47上,接近探测区域e3被设定在候梯厅15中的乘用轿厢11的出入口附近(的地板面),乘梯意图推断区域e4被设定在候梯厅15(的地板面)。
[0064]
在设定各探测区域e1~e4时,根据乘用轿厢11的各构成部的设计值、摄像机12的固有值,计算在拍摄图像上映出乘用轿厢11的地板面19、正面柱41a、41b、轿厢门槛47、以及候梯厅15(的地板面)、候梯厅门槛18等的区域。乘用轿厢11的各构成部的设计值、摄像机12的固有值例如包含以下项目。
[0065]
·
面宽的宽度(轿厢的出入口的横向宽度)
[0066]
·
门的高度
[0067]
·
柱的宽度
[0068]
·
门的类型(对开/右侧或左侧旁开)
[0069]
·
地板或墙壁的面积
[0070]
·
摄像机相对于面宽的相对位置(三维)
[0071]
·
摄像机的角度(3轴)
[0072]
·
摄像机的视场角(焦距)
[0073]
探测区域设定部22a基于上述的各种值,计算在拍摄图像上可能映出应设定各探测区域e1~e4的区域的区域,针对该计算出的区域设定各探测区域e1~e4。
[0074]
接着,对乘用轿厢11运转时的动作进行说明。
[0075]
摄像机12以规定的帧率开始包含乘用轿厢11内和候梯厅15的拍摄对象的拍摄。摄像机12的拍摄持续地进行。图像处理装置20按时间顺序获取由摄像机12拍摄的图像(步骤s12),一边将这些图像依次保存到存储部21中,一边实时地执行图3所示的探测处理。
[0076]
当乘用轿厢11到达任意层的候梯厅15时(步骤s13的“是”),图像处理装置20的探测处理部22b在轿厢门13被开门之前,执行以被拉入探测区域e1为对象的探测处理(步骤s14)。具体而言,探测处理部22b以获取的拍摄图像所包含的多个块中的被拉入探测区域e1内的块为对象,执行图3所示的一系列探测处理。
[0077]
上述步骤s14的探测处理的结果从图像处理装置20输出到电梯控制装置30(步骤s15)。在接收到上述步骤s14的探测处理的结果之后,电梯控制装置30执行与以被拉入探测区域e1为对象的探测处理的结果对应的对应处理(以下,标记为第1对应处理)(步骤s16)。
[0078]
在此,参照图7的流程图,对第1对应处理的流程进行说明。
[0079]
在被拉入探测区域e1内没有探测到人或物体(的运动)的情况下(步骤s16-1的“否”),电梯控制装置30的门开闭控制部32如通常那样进行打开轿厢门13的控制(步骤s16-2),结束第1对应处理。
[0080]
另一方面,在被拉入探测区域e1内探测到人或物体(的运动)的情况下(步骤s16-1“是”),电梯控制装置30的通知部33通过乘用轿厢11内的扬声器46进行声音广播,唤起乘用轿厢11内的使用者的注意以使其离开轿厢门13(步骤s16-3)。然后,电梯控制装置30的门开闭控制部32进行以比通常慢的开门速度打开轿厢门13的控制(步骤s16-4),结束第1对应处理。
[0081]
另外,也可以在从执行上述步骤s16-3的处理起经过规定时间后执行上述步骤s16-4的处理。由此,能够确保使用者从轿厢门13离开的时间,因此能够更可靠地抑制被拉入轿厢门13的事故。
[0082]
另外,在此,即使在被拉入探测区域e1内探测到人或物体,电梯控制装置30也在唤起使用者注意后,以比通常时慢的速度打开轿厢门13,但不限于此,例如,也可以是只要在被拉入探测区域e1内探测到人或物体,电梯控制装置30就不打开轿厢门13。这样的门开闭控制虽然具有能够大幅提高使用者的安全性的优点,但另一方面,存在使运转效率降低的可能性,因此,例如,也可以自在被拉入探测区域e1内探测到人或物体起经过规定时间后,即使在被拉入探测区域e1内探测到人或物体,也打开轿厢门13。
[0083]
另外,在这里,假设在轿厢门13开门之前执行以被拉入探测区域e1为对象的探测处理的情况并进行了说明,但在轿厢门13的开门动作中也同样,可以执行以被拉入探测区域e1为对象的探测处理。在开门动作中被拉入探测区域e1内探测到人或物体的情况下,电
梯控制装置30的门开闭控制部32进行使轿厢门13的开门动作暂时停止、或者使轿厢门13向反方向(关门方向)移动等的控制。
[0084]
再次返回到图6的说明。当第1对应处理的结果是轿厢门13开门时探测处理部22b执行以各探测区域e1~e4为对象的探测处理(步骤s17)。具体而言,探测处理部22b将获取的拍摄图像所包含的多个块中的各探测区域e1~e4内的块分别作为对象,执行图3所示的一系列的探测处理。
[0085]
上述步骤s17的探测处理的结果从图像处理装置20输出到电梯控制装置30(步骤s18)。在接收到上述步骤s17的探测处理的结果之后,电梯控制装置30执行与以各探测区域e1~e4为对象的探测处理的结果对应的对应处理(以下,标记为第2对应处理)(步骤s19),结束本系统中的一系列动作。
[0086]
在此,参照图8的流程图,对第2对应处理的流程进行说明。
[0087]
在各探测区域e1~e4内没有探测到人或物体(的运动)的情况下(步骤s19-1的“否”),电梯控制装置30的门开闭控制部32如通常那样进行关闭轿厢门13的控制(步骤s19-2),结束第2对应处理。当通过门开闭控制部32使轿厢门13完全关闭之后,乘用轿厢11朝向下一个目的层出发。
[0088]
另一方面,在各探测区域e1~e4内的任意一个中探测到人或物体(的运动)的情况下(步骤s19-1的“是”),电梯控制装置30执行与探测到人或物体(的运动)的探测区域对应的处理(步骤s19-3)。
[0089]
例如,在被拉入探测区域e1或门槛上探测区域e2内探测到人或物体的情况下,电梯控制装置30的门开闭控制部32维持轿厢门13的开门状态(全开状态),通知部33唤起乘用轿厢11内的使用者的注意以使其离开出入口附近。另外,在接近探测区域e3内探测到人或物体的情况下,电梯控制装置30的门开闭控制部32维持轿厢门13的开门状态。进而,在乘梯意图推定区域e4内探测到人或物体的情况下,在进而探测到该被探测到的人或物正在接近乘用轿厢11的情况下,电梯控制装置30的门开闭控制部32维持轿厢门13的开门状态。另一方面,在乘梯意图推定区域e4内探测到人或物体的情况下,在进而探测到该被探测到的人或物并未正在接近乘用轿厢11的情况下,电梯控制装置30执行上述的步骤s19-2的处理。
[0090]
另外,在多个探测区域内探测到人或物体的情况下,电梯控制装置30分别执行与探测到人或物体的各探测区域对应的处理。
[0091]
另外,在这里,假设在轿厢门13全开时执行以各探测区域e1~e4为对象的探测处理的情况并进行了说明,但在轿厢门13的关门动作中也同样,可以执行以各探测区域e1~e4为对象的探测处理。在关门动作中,在各探测区域e1~e4内探测到人或物体的情况下,电梯控制装置30的门开闭控制部32基本上中断轿厢门13的关门动作,并进行使轿厢门13向反方向(开门方向)移动的再次打开等的控制。
[0092]
如以上说明的那样,根据本系统,能够对位于各探测区域e1~e4内的人或物体(的运动)进行探测,实现与该探测的结果对应的门开闭控制。
[0093]
另一方面,在上述图3所示的一系列探测处理中,由于用于探测人或物体(的运动)而使用的亮度差的阈值在各探测区域e1~e4中相同,所以有可能产生如下的问题。另外,上述的亮度差的阈值,以想要可靠地探测人或物体(的运动)的接近探测区域e3为基准,由维护人员设定(或者,在出厂时预先设定)。另外,由于上述的亮度差的阈值是为了探测人或物
体而设定的值,所以以下有时也称为用于探测人或物体的灵敏度、或者简称为探测灵敏度来进行说明。
[0094]
例如,在被拉入探测区域e1中,可能会出现因乘用轿厢11内的照明而引起的人或物体的影子。特别是,如上所述,由于被拉入探测区域e1被设定在正面柱41a、41b的内侧侧面41a-1、41b-1这样的操作盘45的附近,所以映入对操作盘45进行操作的使用者的影子的可能性高。此时,如上所述,在将用于探测人或物体(的运动)的灵敏度一律设定为在接近探测区域e3中能够可靠地探测人或物体的值的情况下(即,在将探测灵敏度设定得较高的情况下),由于微小的亮度值的变化也作为人或物体而被探测,所以上述使用者的影子的运动有可能作为人或物体被误探测。
[0095]
根据该误探测,有可能发生由电梯控制装置30进行的错误的门开闭控制,发生轿厢门13的开门速度变慢(或者,轿厢门13无论经过多久都不开门)、或者轿厢门13的开门状态被维持、轿厢门13无论经过多久都不关门(或者,轿厢门13多次再次打开)等情况。这对于使用者不是优选的情况。
[0096]
因此,在本实施方式所涉及的电梯的使用者探测系统中,其特征在于,针对各探测区域e1~e4设定不同的探测灵敏度。另外,以下,根据维护人员的操作,将接近探测区域e3所设定的探测灵敏度称为基准灵敏度或基准阈值来进行说明。
[0097]
在图6所示的步骤s11的处理中,探测区域设定部22a在拍摄图像上设定各探测区域e1~e4,并且根据维护人员的操作,接受用于对人或物体(的运动)进行探测的灵敏度的输入。探测区域设定部22a将接受了输入的探测灵敏度设定为用于在接近探测区域e3中探测人或物体的灵敏度、即基准灵敏度。
[0098]
另外,探测区域设定部22a将上述的基准灵敏度设定为门槛上探测区域e2中的探测灵敏度。这是因为,从门槛上探测区域e2抑制被门夹住的事故的观点出发,需要可靠地探测人或物体。
[0099]
进而,探测区域设定部22a设定比上述基准灵敏度低的探测灵敏度(即,设定比与基准灵敏度对应的亮度差的阈值大的亮度差的阈值),作为设定在比接近探测区域e3更远离轿厢门13的场所的乘梯意图推定区域e4中的探测灵敏度。由此,能够实现如下的探测处理:在靠近轿厢门13的场所可靠地探测人或物体(的运动),但在远离轿厢门13的场所不会超过需要地探测人或物体。
[0100]
另外,探测区域设定部22a设定比上述基准灵敏度低的探测灵敏度(即,设定比与基准灵敏度对应的亮度差的阈值大的亮度差的阈值),作为设定在操作盘45附近的被拉入探测区域e1中的探测灵敏度。由此,能够实现如下的探测处理:在候梯厅15侧的靠近轿厢门13的场所可靠地探测人或物体(的运动),但在对操作盘45进行操作的使用者的影子容易映出的场所,不会由于该使用者的影子的运动程度的亮度差的变化而探测到人或物体。另外,在被拉入探测区域e1中设定的探测灵敏度、以及在乘梯意图推定区域e4中设定的探测灵敏度都是比上述基准灵敏度低的探测灵敏度这一点上是共通的,但这些探测灵敏度可以相同,也可以不同。
[0101]
另外,如图9所示,在存储部21中预先存储有将探测灵敏度和亮度差的阈值对应起来的设定值信息。例如,根据图9所示的设定值信息i1,表示与“探测灵敏度(中)”对应的亮度差的阈值为“a”。同样,根据设定值信息i2,表示与“探测灵敏度(低)”对应的亮度差的阈
值为“b(>a)”。进而,根据设定值信息i3,表示与“探测灵敏度(高)”对应的亮度差的阈值为“c(<a)”。
[0102]
探测区域设定部22a从存储部21读出与根据维护人员的操作而接受了输入的探测灵敏度对应的亮度差的阈值,对接近探测区域e3设定该读出的亮度差的阈值。这样对接近探测区域e3设定的亮度差的阈值相当于上述的基准灵敏度。
[0103]
因此,例如在根据维护人员的操作而接受了输入的探测灵敏度为“探测灵敏度(中)”的情况下,探测区域设定部22a从存储部21读出与“探测灵敏度(中)”对应的亮度差的阈值“a”,并对接近探测区域e3设定该阈值“a”。在该情况下,由于“探测灵敏度(中)”成为基准灵敏度,所以例如门槛上探测区域e2的探测灵敏度也成为“探测灵敏度(中)”,被拉入探测区域e1和乘梯意图推定区域e4的探测灵敏度成为“探测灵敏度(低)”。
[0104]
另外,例如在根据维护人员的操作而接受了输入的探测灵敏度为“探测灵敏度(高)”的情况下,探测区域设定部22a从存储部21读出与“探测灵敏度(高)”对应的亮度差的阈值“c”,并对接近探测区域e3设定该阈值“c”。在该情况下,由于“探测灵敏度(高)”成为基准灵敏度,所以例如门槛上探测区域e2的探测灵敏度也成为“探测灵敏度(高)”,被拉入探测区域e1和乘梯意图推定区域e4的探测灵敏度成为探测灵敏度比“探测灵敏度(高)”低的“探测灵敏度(中)”或“探测灵敏度(低)”中的某一个。
[0105]
另外,为了便于说明,在图9中仅示出了3个设定值信息i1~i3,但存储在存储部21中的设定值信息的数量不限于此,也可以存储更多的设定值信息。
[0106]
图10是用于说明在各探测区域e1~e4中设定不同的探测灵敏度的情况下的优点的图。图10着眼于拍摄图像中包含的多个块中的一个块,表示连续的两张图像中的该一个块的平均亮度值的差的时间序列变化。图10的(a)表示着眼于接近探测区域e3内的一个块的情况,图10的(b)表示着眼于被拉入探测区域e1内的一个块的情况。
[0107]
在图10的(a)中,表示在接近探测区域e3中设定了“a”作为与探测灵敏度对应的亮度差的阈值的情况,表示在时间t1~t2中平均亮度值的差超过了阈值“a”的情况。在该情况下,探测处理部22b在时间t1~t2中探测到在接近探测区域e3内有人或物体。
[0108]
图10的(b)的单点划线表示由使用者的影子的运动引起的平均亮度值的差的时间序列变化,图10的(b)的实线表示由使用者的手或手臂的运动引起的平均亮度值的差的时间序列变化。
[0109]
与图10的(a)所示的接近探测区域e3同样,在被拉入探测区域e1中设定了“a”作为亮度差的阈值的情况下,如图10的(b)的单点划线所示,即使是起因于使用者的影子的运动的平均亮度值的差,在时间t3~t6中也会超过阈值“a”,所以探测处理部22b在时间t3~t6中误探测为在被拉入探测区域e1内有人或物体。
[0110]
但是,在被拉入探测区域e1中设定了“b(>a)”作为亮度差的阈值的情况下,如图10的(b)的单点划线所示,由于使用者的影子的运动所引起的平均亮度值的差一次也没有超过阈值“b”,所以探测处理部22b能够抑制将使用者的影子的运动误探测为人或物体(的运动)的情况。另一方面,如图10的(b)的实线所示,在时间t4~t5中,因使用者的手或手臂的移动而引起的平均亮度值的差超过阈值“b”,因此探测处理部22b能够探测在被拉入探测区域e1内有人或物体。即,探测处理部22b能够仅将使用者的手或手臂的动作作为人或物体(的动作)进行探测。
[0111]
如以上说明的那样,本实施方式所涉及的电梯的使用者探测系统具备:摄像机12,其设置在乘用轿厢11的门13附近,拍摄包含乘用轿厢11内和候梯厅15的图像;探测区域设定部22a,其在拍摄到的图像上设定用于探测人或物体的多个探测区域e1~e4,对所设定的多个探测区域e1~e4的每一个设定不同的探测灵敏度;探测处理部22b,其对所设定的每个探测区域e1~e4执行用于探测人或物体的探测处理;以及电梯控制装置30,其使探测处理的结果反映于乘用轿厢11的门13的门开闭控制。由此,能够分别设定适合于各探测区域e1~e4的探测灵敏度,因此能够提高使用者的探测精度。
[0112]
以下,对变形例进行说明。
[0113]
(第1变形例)
[0114]
第1变形例与上述实施方式的不同点在于,不仅对各探测区域e1~e4分别设定不同的探测灵敏度,而且即使在同一探测区域内,也根据场所进一步设定不同的探测灵敏度。
[0115]
例如,也可以将乘梯意图推定区域e4分为接近乘用轿厢11的出入口的一侧和远离乘用轿厢11的出入口的一侧,使接近乘用轿厢11的出入口的一侧的探测灵敏度比远离乘用轿厢11的出入口的一侧的探测灵敏度高。即,在乘梯意图推定区域e4中的远离乘用轿厢11的出入口的一侧,设定比接近探测区域e3低的探测灵敏度,在乘梯意图推定区域e4中的靠近乘用轿厢11的出入口的一侧,设定比接近探测区域e3低且比远离乘用轿厢11的出入口的一侧高的探测灵敏度。
[0116]
这是因为,在乘梯意图推定区域e4中,越是接近乘用轿厢11的出入口的地方,对人或物体(的运动)进行探测的必要性越高,越是远离乘用轿厢11的出入口的地方,该必要性越低。
[0117]
另外,在被拉入探测区域e1中,也可以使被拉入探测区域e1-3的探测灵敏度高于被拉入探测区域e1-1、e1-2的探测灵敏度。即,在被拉入探测区域e1-1、e1-2中,设定比接近探测区域e3低的探测灵敏度,在被拉入探测区域e1-3中,设定比接近探测区域e3低且比被拉入探测区域e1-1、e1-2高的探测灵敏度。
[0118]
这是因为,设定被拉入探测区域e1-1、e1-2的正面柱41a、41b的内侧侧面41a-1、41b-1一般由金属等容易反射的构件构成,预想到容易映出使用者的影子,另一方面,设定被拉入探测区域e1-3的乘用轿厢11的地板面19由容易反射的构件构成的可能性低,预想到难以映出使用者的影子。
[0119]
根据以上说明的第1变形例,即使在同一探测区域内,也能够根据场所进一步设定不同的探测灵敏度,能够进一步提高使用者的探测精度。
[0120]
(第2变形例)
[0121]
第2变形例与上述实施方式的不同之处在于,不仅对各探测区域e1~e4的每一个设定不同的探测灵敏度,而且还根据乘用轿厢11的类别进一步设定不同的探测灵敏度。
[0122]
例如,在乘用轿厢11是与轮椅对应的轮椅号梯的情况下,由轮椅使用者利用的可能性高,优选在远离乘用轿厢11的出入口的乘梯意图推定区域e4中也以某种程度的探测灵敏度探测人或物体。因此,在乘用轿厢11的种类为轮椅号梯的情况下,与轮椅号梯以外的一般号梯相比,也可以提高乘梯意图推定区域e4的探测灵敏度。
[0123]
由此,在乘用轿厢11的种类为轮椅号梯的情况下,能够对各探测区域e1~e4设定不同的探测灵敏度,并且在乘梯意图推定区域e4中设定比一般号梯的乘梯意图推定区域e4
高的探测灵敏度。
[0124]
另外,在此,说明了根据乘用轿厢11的类别进一步设定不同的探测灵敏度的情况,但不限于此,例如,也可以根据呼叫的类别进一步设定不同的探测灵敏度。另外,在该情况下,需要在每次登记呼叫时进行针对探测区域的探测灵敏度的设定。
[0125]
例如,在登记了经由由轮椅使用者操作的轮椅操作盘的呼叫的情况下,也可以与上述轮椅号梯的情况同样地,对各探测区域e1~e4的每一个设定不同的探测灵敏度,并且将乘梯意图推定区域e4的探测灵敏度设定得比在登记了一般呼叫的情况下在乘梯意图推定区域e4设定的探测灵敏度高。
[0126]
根据以上说明的第2变形例,能够根据乘用轿厢11的种类或呼叫的种类进一步设定不同的探测灵敏度,能够进一步提高某一定条件下的使用者的探测精度。
[0127]
(第3变形例)
[0128]
第3变形例与上述实施方式的不同点在于,不仅对各探测区域e1~e4的每一个设定不同的探测灵敏度,而且在途中变更被判断为过探测的探测区域的探测灵敏度。换言之,在各探测区域e1~e4设定的探测灵敏度被实时地变更这一点上,与上述的实施方式不同。
[0129]
例如,假设尽管对各探测区域e1~e4的每一个设定了不同的探测灵敏度,但仍然多次再次开门的情况。在该情况下,探测处理部22b对在哪个探测区域内探测到人或物体并再次开门这一情况进行计数,在该再次开门的次数超过了规定次数的情况下,能够将该探测区域判断为过探测区域。在该情况下,探测区域设定部22a通过将被判断为过探测区域的探测区域的探测灵敏度变更为比当前的探测灵敏度低的探测灵敏度,能够抑制继续再次开门的可能性。
[0130]
另外,在上文中对再次开门的次数进行了计数,但也可以仅对探测到人或物体的次数进行计数,在该计数值超过了规定次数的情况下,将被判断为过探测区域的探测区域的探测灵敏度变更为比当前的探测灵敏度低的探测灵敏度。
[0131]
根据以上说明的第3变形例,能够探测过探测区域,变更该过探测区域的探测灵敏度,能够抑制伴随使用者的过探测的电梯的运转效率的降低。
[0132]
在本实施方式中,假设根据现场的维护人员的操作来设定探测灵敏度的情况并进行了说明,但不限于此,例如也可以通过与远离现场的远程监视中心等外部装置的通信来设定。在这种情况下,为了实现与外部装置的通信,在图像处理装置20中设置有通信部。
[0133]
另外,虽然对本发明的几个实施方式进行了说明,但这些实施方式是作为例子而提示的,并不意图限定发明的范围。这些新的实施方式能够以其他各种方式实施,在不脱离发明的主旨的范围内,能够进行各种省略、置换、变更。
起点商标作为专业知识产权交易平台,可以帮助大家解决很多问题,如果大家想要了解更多知产交易信息请点击 【在线咨询】或添加微信 【19522093243】 与客服一对一沟通,为大家解决相关问题。
与客服一对一沟通,为大家解决相关问题。
此文章来源于网络,如有侵权,请联系删除
相关标签: 阈值

 热门咨询
热门咨询




tips